基于单片机倒车防撞报警系统设计
南京信息工程大学滨江学院, 南京210044
摘要:对于汽车倒车防撞问题,提出了将超声波测距仪和单片机结合于一体的方案,并给出了一种基于AT89C51单片机的倒车防撞报警系统的设计,对系统中控制部分、发射部分、接收部分、显示部分和报警部分出现的问题进行处理。本文采用一种简单易行的测距原理建立了防撞报警系统,具体分析了倒车防撞系统的设计原理及各部分元件的设计方案,充分描述了超声波测距的原理及应用,并介绍了我国在超声波测距的发展现状,不过还有一些无法避免的测量误差,还需日益俱进的科学发展加以解决。
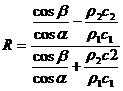
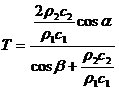
随着社会经济的发展交通运输业飞速发展,汽车的数量在大副攀升。交通拥挤状况也日趋严重,撞车事件屡屡发生,造成了不可避免的人身伤亡和经济损失。针对这种情况,设计一种响应快,可靠性高且较为经济实用的汽车防撞报警系统势在必行。超声波测距法是最常见的一种距离测距方法,应用于汽车停车的前后左右防撞的近距离和低速状况,并且在汽车倒车防撞报警系统中,超声波作为一种特殊的声波,同样具有声波传输的基本物理特性——折射,反射,干涉,衍射,散射。超声波测距即是利用其反射特性,当车辆后退时,超声波距离传感器利用超声波检测车辆后方的障碍物位置,并利用指示灯及蜂鸣器把车辆到障碍物的距离及位置通知驾驶人员,起到安全的作用。
1.2 国内外现状
汽车倒车防撞测距报警器是国家安全技术发展期间重点开发的科研项目之一。以往的汽车倒车测距一般有四种:1嘀嘀声加闪光、2音乐声加闪光、3语音声加闪光、4倒车到危险距离时发出警报声的超声波倒车报警器。由于很多研究都采用的是特殊难购且稀有的专用元件,使其难以推广。而本设计采用国内生产的通用元件,成本较低廉,并且使其在整个倒车过程中自动测量车尾到最近障碍物的距离,在倒车到极限距离时会发出急促的警告声,提醒驾驶员注意刹车,避免事故的发生。
本论文概述了超声波检测的发展及工作原理,阐述了超声波传感器的原理、特点、分类;对于报警系统的一些主要参数进行了讨论和研究,以及在超声波测距系统功能的基础上,提出了报警系统的总体结构;并且设计了系统发射、接收电路,并仔细介绍了系统各设计单元的原理及它们的工作原理。
 (无限介质)
(无限介质)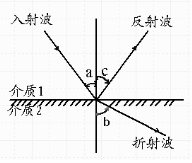


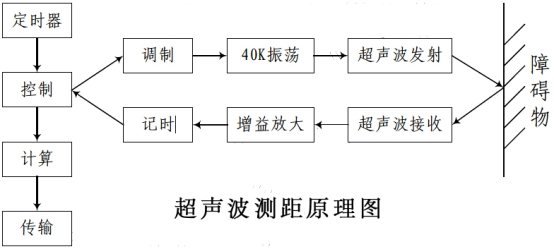
发射部分的电脉冲电压很高,但是由障碍物回波因其的压电晶片产生的射频电压不过几十毫伏,要对这样小的信号进行处理就必须放大到一定的幅度。接收部分就由三级放大电路,检波电路及门限判别电路构成的,其中包括杂波抑制电路。最终达到对回波进行放大检测,产生一个单片机能够识别的中断信号作为回波到达的标志。但是由于超声传感器固有特性,即盲区的存在,对于回波的接收和处理造成了相当程度的影响。
3系统硬件设计系统硬件原理图如图3及PCB双面板如图4:
图3 系统硬件原理图

图4 PCB双面板
3.1 最小单片机模块
本方案使用的单片机是AT89C51。AT89C51是一个低电压,高性能CMOS8位单片机。片内含4KB的可反复擦写的Flash只读程序存储器和128B的随机存取数据存储器(RAM)。器件采用ATMEL公司的高密、非易失性存储技术产生,兼容标准MCS-51指令系统,片内置通用8位中央处理器和Flash存储单元,内置功能强大的微型计算机的AT89C51提供了高性价比的解决方案。 AT89C51是一个低功耗高性能单片机,40个引脚,32个外部双向输入/输出(I/O)端口,同时内含2个外中断口,2个16位可编程定时计数器,2个全双工串行通信口。AT89C51可以按照常规方法进行编程,也可以在线编程。其将通用的微处理器和Flash存储器结合在一起,特别是反复擦写的Flash存储器可有效地降低开发成本。
单片机最小模块常包含:复位电路,晶振电路,p0口排阻,电源接口电路,串口电路(本单片机程序都是从开发板上烧写进入,无需增加串口电路,可节约成本)。


3.3 报警电路设计
系统报警电路由一个三极管和一个喇叭组成。
图5 系统报警电路
3.4.1 LCD1602主要技术参数:
显示容量:16×2个字符
芯片工作电压:4.5—5.5V
工作电流:2.0mA(5.0V)
模块最佳工作电压:5.0V
字符尺寸:2.95×4.35(W×H)mm
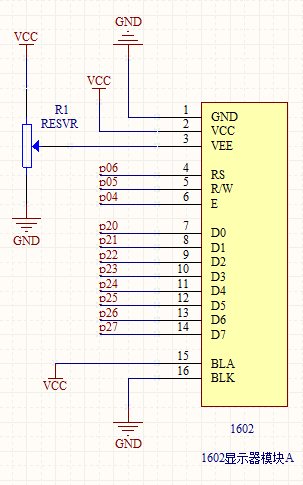
3.4.2 LCD1602各引脚功能:
第1脚:VSS为地电源。
第2脚:VDD接5V正电源。
第3脚:VL为液晶显示器对比度调整端,接正电源时对比度最弱,接地时对比度最高,对比度过高时会产生“鬼影”,使用时可以通过一个10K的电位器调整对比度。
第4脚:RS为寄存器选择,高电平时选择数据寄存器、低电平时选择指令寄存器。
第5脚:R/W为读写信号线,高电平时进行读操作,低电平时进行写操作。当RS和R/W共同为低电平时可以写入指令或者显示地址,当RS为低电平R/W为高电平时可以读忙信号,当RS为高电平R/W为低电平时可以写入数据。
第6脚:E端为使能端,当E端由高电平跳变成低电平时,液晶模块执行命令。
第7~14脚:D0~D7为8位双向数据线。
第15脚:背光源正极。
第16脚:背光源负极。
4系统软件程序
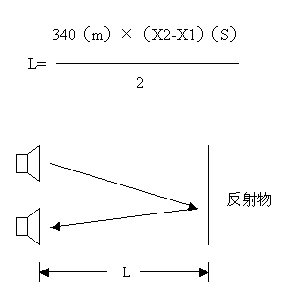
T0中读取出来的时间差数据并不能作为距离值直接显示输出,因为时间差值与实际的距离值之间转换公式为S=0.5*V*T。其中,V为声音在常温下的传播速度,T为发射信号到接收之间经历的时间,在这个部分中,信号处理包括计数值与距离值换算,二进制与十进制转换。
在这漫长而又短暂之中,通过自己不断地学习,不断地努力与拼搏、不断地对新知识的追求与索取、不断地自我发现、感到自己的知识结构水平提出高了许多,对知识的掌握程度也加深了许多,对知识之间的相互联系也有了更深的了解;通过不断地提高自己的认识水平与能力、不断地学习新方法、新思想、新的思维方式、不断地改变自己的人生观和方法论、感到自己不但成长且成熟了许多;通过不断地把课本知识应用于实际,不断地把查阅到的资料与文献中有用的东西应用于实现,不断地把所学的理论与方法应用于设计之中,从而提高了自己理论联系实际的能力。
[1] 朱月秀,单片机原理与应用(第二版).北京:科学出版社, 2004:2
[2] 周良权,傅恩锡, 李世馨.模拟电子技术基础(第2版).北京:高等教育出版社, 2001:121-123
[3] 陈莹.基于单片机的超声波测距系统:[硕士论文],华中科技大学硕士学位论文, 2004:4
[4] 邱平.略论我国非金属超声波检测仪器的发展状况.工程质量, 1998:56
[5] 超声波探伤编写组.超声波探伤.北京:电力工业出版社, 1980:32
[6] 李鸣华,余水宝.单片机在超声波料位测量中的应用.电子技术应用, 1998:157
[7] 李丽霞.单片机在超声波测距中的应用.电子技术, 2002:117
[8] 荀殿栋.数字电路设计实用手册.北京:电子工业出版社, 2003:108-110
[9] 戴曰章.基于AT89C51单片机的超声波测距系统.电气时代, 2005:246
[10] 董敏学.汽车倒车防撞防止系统设计.上海汽车, 2001:143-149
[11] 董子和,李永辉.超声波测距系统的建立及其在汽车防撞系统的应用.汽车电器1997:15-16
[12] 李茂山.超声波测距原理及实践技术.实用测距技术,北京:机械工业出版社, 1994:16
[13] 雷辉.基于AT89C51的智能防撞报警器设计.电气时代, 2005:89
[14] 黄建兵.超声波精确测距的研究.南京理工大学学士学位论文, 2004:215
[15] 李全利, 迟荣强.单片机原理及接口技术.北京:高等教育出版社, 2004:12-14.
[16] 曾城.基于CAN-BUS的汽车防撞报警系统控制单元的研究开发.西安:长安大
学,2004:126
[17] 胡铁红.高速公路追尾及侧向碰撞预警系统模型的研究.西安:长安大学,2004:66
[18] 赵纬华.高速公路碰撞预防报警系统传感器及电源研究.西安:长安大学,2004:63
[19] 侯德藻.汽车纵向主动避撞系统的研究.北京:清华大学,2004:41
[20] Gabriel leen, Dond Heffernam,and alan Dune. Digital Networks in the AuT0motive
Vehicle.IEE Computing & Control Engineering journal. 2006:D67,216-222.
[21] A. D. C. Specification for NISSAN 172 ACC Radar System ARS100. Jun 20, 2007; 102;394-399;
[22] Miles UpT0n. Techinques For Distance Measurement SAE95. 2003:167
[23] 高延龄.汽车运用工程.北京:人发交通出版社,1997:157
致 谢
历时半载,从论文选题到搜集资料,从开题报告、写初稿到反复修改,期间经历了喜悦、聒噪、痛苦和彷徨,在写作论文的过程中心情是如此复杂。如今,伴随着这篇毕业论文的最终成稿,复杂的心情烟消云散,自己甚至还有一点成就感。
最后,我要感谢四年的大学生活,感谢南京信息工程大学滨江学院08级电科班的所有老师同学以及我的家人和那些永远也不能忘记的朋友,他们的支持与情感,是我永远的财富。
 51单片机实现超声波测距报警系统.doc
(690.05 KB, 下载次数: 38)
51单片机实现超声波测距报警系统.doc
(690.05 KB, 下载次数: 38)
| 欢迎光临 (http://www.51hei.com/bbs/) | Powered by Discuz! X3.1 |