1前言
1.1选题背景与意义
我们祖先抽水用的水井轱辘是一种最早的人力卷扬机。
1835年,升降机的动力由人力等其他形式的动力转换为蒸汽为动力。
1853年,升降系统的安全保护装置首先由美国人奥蒂斯研发出。
1858年,人们研发出带有安全装置的升降系统,这种升降系统可以载人,而且这种升降系统首先是以蒸汽为动力。
1903年,曳引式电梯产生,由于曳引式电梯具有种种优点,所以一直沿用至今。
1928年,集选控制电梯产生。
1949年,群控电梯产生。
1955年,开发出了由工业微型计算机控制的电梯系统。
回顾电梯的发展历史,新技术、新理论总是不断的在推动着电梯向前发展。之前的几十年间,促使电梯不断发展的是人们在乘坐电梯时的安全问题。然而在资源匮乏的今天,在考虑到电梯的安全、便捷的前提下,节能是电梯发展的重要方向。
从我们学校的图书馆来看,每天有近千次的学生来图书馆看书、上自习,然而,只有一台电梯在工作,人流高峰期时仅靠一台电梯根本运转不过来,从而使得我们的图书馆的功能无法发挥极致。而我们学校的理工实验大楼,虽然也是只有一台电梯在运作,但是理工实验的学生流量依靠一台电梯完全可以有效的疏解。
1.2电梯的分类和组成
分类标准 | 内容 | ||
速度 | 丙梯 | 乙梯 | 甲梯 |
用途 | 乘客电梯 | 住宅电梯 | 载货电梯 |
拖动方式 | 交流电梯 | 直流电梯 | 液压电梯 |
有无司机 | 有司机电梯 | 无司机电梯 | 有/无司机电梯 |
控制方式 | 信号控制电梯 | 群控电梯 | 并联控制电梯 |
曳引机结构 | 有齿曳引机电梯 | 无齿曳引机电梯 | ----------------- |
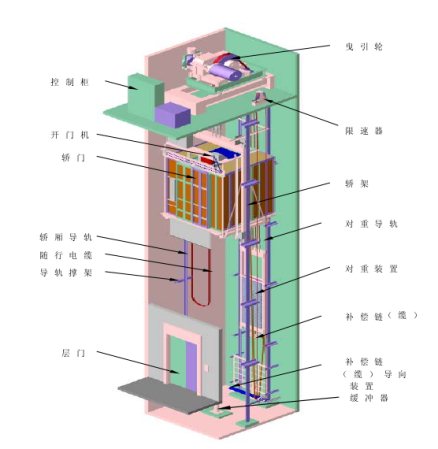
电梯的构成:
(1)曳引系统
(2)导向系统
(3)轿厢和对重系统
(4)门系统
(5)安全保护系统
(6)电气控制系统
电梯的基本组成如图1.1所示。
1.3电梯的发展现状
1.3.1国外电梯发展情况
世界知名的生产电梯的公司主要有美国的奥蒂斯公司、日本三菱公司、日立公司和芬兰科恩等公司[1]。这些比较大的电梯制造厂商由于核心技术过硬,从电梯开始发展就引领者电梯的发展潮流,而且产品性能优良所以这些大公司的主导着超过半数的全球电梯市场。
1.3.2国内电梯发展情况
在建国之后,电梯产业发展迅速,国内电梯总的保有量有较大提升,但也主要作为外国的代工厂。近年来,我国的电梯产业得到飞速的提升,发展了自己的品牌,其中较为优秀的有上海华蒂、上海三菱、上海永达。
1.4电梯新技术
现阶段,国际上开发出的较为先进的电梯控制技术有以下几个方面:
(1)全数字识别乘客技术;
(2)数字智能型安全控制技术;
(3)第四代无机房电梯技术;
(4)双向安全保护技术;
(5)快速安装技术;
(6)节能技术;
(7)数字监控技术;
(8)无线远程控制及报警技术。
1.5论文的主要内容
本设计主要对八层电梯系统进行了讨论和研究。特别适合于一般的大型商场。论文所进行的主要内容有以下几个方面:
(1)查阅了电梯的发展历史,了解到对电梯发展起至关重要的几个阶段,新技术的产生对于电梯的发展起着至关重要的角色。
(2)对变频器和PLC进行了详细的介绍,确定使用变频器结合PLC对电梯拖动系统进行控制。并对比不同控制方法的优劣,以及确定使用西门子S-200PLC作为本设计的控制核心,采用安川616G5变频器对电机进行控制。并在此基础上对变频器和PLC进行了选型计算。
(3)对电梯的硬件系统进行了详细的介绍,明确了本设计所要达到的目标,进而对于变频器的参数进行了设置,对于PLC的点数进行了分配,介绍了电梯运行的速度曲线。
(4)对于电梯的控制程序进行了设计。
2变频器和PLC系统的概述
2.1变频器结合PLC对电梯控制的优点
变频器结合PLC对电梯控制有以下优点:
(1)变频器结合PLC可以实现用程序对电梯进行控制,可使电梯更加可靠。
(2)由于不是使用继电器对电梯进行控制,可以省去很多复杂的接线。
(3)控制程序的修改是比较容易的,所以对电梯控制系统的修改也是比较容易的。
(4)PLC功能强,所以易于实现电梯的检修。
(5)由于PLC和变频器的工作效率高,所以电梯的控制效率比较高。
(6)很容易改变控制方式。
(8)变频器可以使得电梯按照既定的速度曲线运行。
(9)变频器的使用可以明显改变输入功率因数,可以实现节能的效果。
2.2 PLC的概述
现代社会对产品的需求不像以前那种大批量的单一品种和规格,更加注重产品的灵活性,定制性等特点。这就要求我们的生产线能够快速的做出调整,可编程控制器(PLC)就是为了满足这种需求才被开发出来的,PLC产生后就迅速作为通用工业控制装置被广泛用于工业控制现场。
2.2.1 PLC的发展历史
1960年在美国通用汽车公司的鼓动下,新型工业控制器PLC产生了。由于其体积小、编程简单、可以在比较差的环境下正常工作,所以被很多厂商竞相使用。1971年,美国的这项技术传入日本,在其基础上日本开始研发自己的可编程控制器。1974年,我国开始研发属于自己的PLC,并于1977年逐渐应用于工业现场。
2.2.2 PLC的发展阶段
PLC由于被创造出来比较晚,但是微处理器并没有限制它的发展,反而微处理器的飞速发展带动了PLC的飞速发展。
第一阶段(20世纪60年代—20世纪70年代中期):此时PLC是继电器控制系统的替代品[1]。
第二阶段(20世纪70年代—20世纪80年代):随着微处理器的大力发展,PLC开始采用微处理器作为CPU,大大的提高了PLC的功能[1]。
第三阶段(20世纪80年代后期—至今):随着微处理器的不断升级,PLC的功能不断的得到强化,速度不断的得到提升。
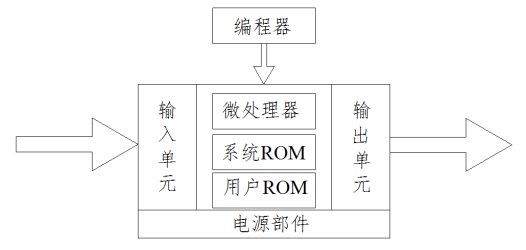
2.2.3 PLC的基本结构
PLC的结构组成如图2.1所示。
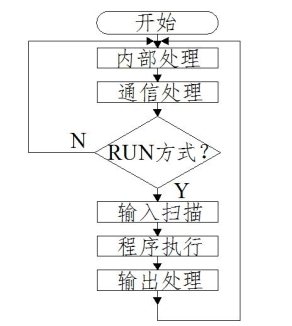
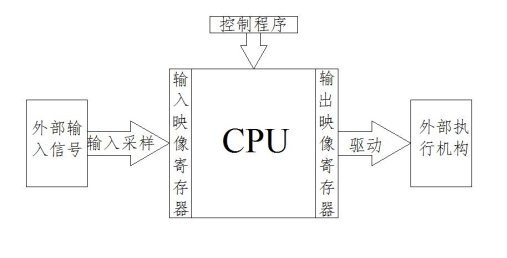
2.2.4 PLC的工作原理
它的工作原理如图2.2所示。
2.2.5本设计对PLC的选型
本设计的控制对象的八层客梯,每个电梯的硬件完全相同,但在设计控制系统时要考虑一下几点:
(1)对输入/输出点的选择
本设计的控制对象为八层客梯,为一层到八层,所以轿厢内的楼层内呼按钮为8个,根据实际,一层只具有上行的功能,八层只具有下行的功能,所以外呼上行和下行按钮都为7个。除此之外,开关门按钮、电梯层定位传感器、限位开关等都要考虑在内。
(2)对存储容量的选择
对于存储容量的确定的一般原则是没必要过大,够用就好,但要留有一定的裕量。
(3)对I/O响应时间的选择
PLC的I/O响应时间包括输入电路延迟、输出电路延迟和扫描工作方式引起的时间延迟等[8]。
西门子公司的S7-200PLC系列产品有CPU221、CPU222、CPU224、CPU226、CPU226XM。
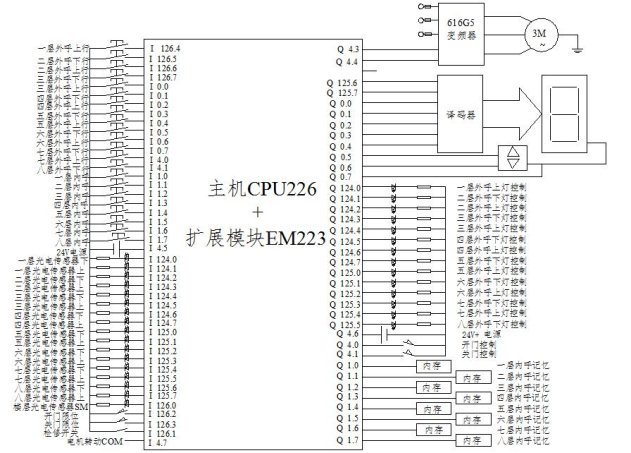
综上所述,主机采用具有24入/16出的CPU226,扩展模块选择具有16入/16出的EM223。这样它们的总的输入/输出为40入/ 32出。在留有余量的情况下符合了设计要求。因为要求输出能够带动较大的负载所以采用继电器输出。PLC通过RS-484接口和电脑链接,依靠STEP7-Micro/WIN软件进行编程、调试而后下载到PLC内存。
CPU221 | CPU222 | CPU224 | CPU226 | CPU226XM | |
程序存储器 | 2048字 | 4096字 | 8192字 | ||
用户数据存储器 | 1024字 | 2560字 | 5120字 | ||
用户存储类型 | EEPROM | ||||
数据后备典型时间 | 50H | 100H | |||
本机I/O | 6入/4出 | 8入/6出 | 14入/10出 | 24入/16出 | |
扩展模块数量 | 2个 | 7个 | |||
内置高速计数器 | 4个(30KHZ) | 6个(30KHZ) | |||
模拟量调节电位器 | 1 | 2 | |||
硬件输入中断 | 4个输入点 | ||||
口令保护 | 有 | ||||
通信口数量 | 1(RS-485) | 2(RS-485) | |||
西门子PLC的主机的功能可以扩展。CPU226主机最多有7个扩展模块。
扩展模块有数字量模块、模拟量模块、智能模块三类[9]。智能模块用来完成一些普通模块达不到要求的功能,如空间测距功能、湿度检测功能。
数字量扩展模块可参考表2.2。
型号 | 输入点数 | 输出点数 |
EM221 DC 24V 输入 | 4,4 | ---- |
EM221 AC 230V 输入 | 8点独立 | ---- |
EM222 DC 24V 输出 5A | ---- | 4点独立 |
EM222 继电器输出 10A | ---- | 4点独立 |
EM222 AC230 输出 | ---- | 8点独立 |
EM222 8点DC24V 输出 | ---- | 4,4 |
EM222 8点继电器输出 | ---- | 4,4 |
EM223 DC24V 数字量4输入/4输出 | 4 | 4 |
EM223 DC24V 数字量4输入/4继电器输出 | 4 | 4 |
EM223 DC24V 数字量8输入/8输出 | 4,4 | 4,4 |
EM223 DC24V 数字量8输入/8继电器输出 | 4,4 | 4,4 |
EM223 DC24V 数字量16输入/16继电器输出 | 8,8 | 4,4,8 |
EM223 DC24V 数字量16输入/16输出 | 8,8 | 4,4,4,4 |
模拟量扩展模块可参考表2.3。
模块 | EM231 | EM232 | EM235 |
点数 | 4入 | 2出 | 4入 ,1出 |
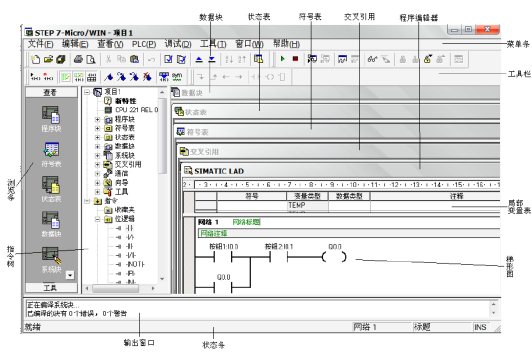
2.3 STEP7-Micro/WIN编程软件概述
STEP7-Micro/WIN编程软件是西门子公司专为S7-200系列PLC设计和开发的程序编辑软件。它功能强大、易学易用,可以方便的用来开发用户程序。
2.3.1 STEP7-Micro/WIN软件的窗口组件
STEP7-Micro/WIN的窗口组件如图2.3所示。
2.4变频器概述
2.4.1变频器简介
通过输入频率的变换,可以使得交流电机的速度调节变得非常容易,所以变频器的产生有非常重要影响。现代社会中交-直-交变频器的应用最为广泛,其工作框图如图2.4所示。

2.4.2变频器的分类
变频器分类:
(1)按变换频率的方法分:
交—直—交变频器
交—交变频器
(2)按主电路分:
电压变频器
电流变频器
(3)按变频器调压方法分:
PAM变频器
PWM变频器
(4)按工作原理分:
U/F控制变频器
转差频率控制变频器
矢量控制通用变频器
直接转矩控制变频器
(5)按照用途分:
通用变频器
高性能专用变频器
高频变频器
2.4.3变频器的调速原理
式中n0——同步转速;
f——电源频率,单位为HZ;
p——电动机极对数;
s——电动机转差率。
由公式可知,改变电源的频率、电动机极对数或电动机转差率即可实现调速[1]。
设计中应该保持磁通不变,因为磁通变大变小都会对电机的运行带来不利的影响。即:
式中E1——电动机定子每相电动势;
f1——电动机定子频率;
N1——定子每相绕组有效匝数;
Φm——每极磁通量。
公式可知,要使Φm保持基本不变,必须保持E1和f1的比例不变或者微小变化[1]。
2.4.4变频器的主要功能
(1)频率给定功能;
(2)加减速时间设置功能;
(3)加减速模式选择功能;
(4)节能功能;
(5)保护功能。
变频器产品说明书都提高标称功率数据,但实际上限制变频器使用功率的是定子电流参数[4]。
选择方式:
(1)按标称功率;
(2)按电动机额定电流;
(3)按电动机实际流通电流;
(4)按转矩过载能力。
综上所述,以错误的方式选择变频器将会对系统造成很大的影响。基本上所选的变频器的标称功率和电动机的功率是符合的,只有在比较极端的情况下是需要大一点的。所以,不能简单的依据高一级的功率来选择变频器,那样会造成浪费的。
变频器应满足的条件:
(1)根据负载特性选型;
(2)所选类型与符合电机参数;
(3)首选通用变频器;
(4)能使电梯平稳起停;
(5)有防失速功能;
(6)转矩特性好。
(7)理想速度曲线运行
(8)节能
综上所述,这个设计中的变频器采用VS-616G5通用变频器。
这种变频器具有如下特点:
(1)具有标准的四种控制方式。
(2)选择功能丰富。
(3)功能全、体积小。
(4)便于维修。
(5)采用LCD操作装置,具有较高的操作性能。
常用参数如表2.4所示。
参数 | 功用 |
A组 | 确定控制模式 |
B组 | 选择运行功能 |
C组 | 确定加减速时间和转矩补偿时间 |
D组 | 选择频率 |
E组 | 确定运行压频曲线 |
F组 | 保护设置 |
H组 | 确定偏差标准 |
变频器参数设计原则:
(1)减小启动冲击及增加调速的舒适感,其速度环比例系数宜小些,而积分时间常数宜大些[3];
(2)高速运行时频率应为50 HZ,低速运行时频率小于50 HZ;
(3)零速一般设计为0HZ,速抱闸功能将影响舒适感[3]。
变频器容量计算
设电梯曳引电机功率为Py。
电梯运行平均速度为V。
电梯自身重量为G1。
轿厢内乘客总重为G2。
电梯所带配重为G3。
重力加速度为g。
变频器功率为P。
电梯爬升所需功率为Pon:
![]() (2-3)
(2-3)
其中![]() 为摩擦力,δ可忽略不计。
为摩擦力,δ可忽略不计。
变频器功率P应接近电机功率Py,既是Pon留有安全余量[4]。
可取![]() 。
。
![]()
![]()
![]()
![]()
![]()
所以:![]()
有所以:![]()
根据计算结果选1.5倍余量,参考变频器功率等级,所得变频器功率为15![]() 。
。
变频器制动电阻参数的计算
考虑到成本因素本设计采用能耗制动方式。
能耗制动电阻RZ与制动电流IZ的关系为:
式中UD ——直流母线电压;
RZ ——制动电阻;
IZ ——制动电流。
(1)轿厢升降拖动系统
轿厢拖动系统如图3.1所示。

(2)电梯的呼叫系统和指示系统
内选和外呼组成了电梯的呼叫系统。
(3)电梯安全保护系统
为保证电梯的安全运行,保障乘客的人身安全和货物的安全,电梯系统中设有各种安全装置[1]。
(1)电梯应该具有能够自动工作的能力,而且当电梯检修时应该具有强制工作的工作模式;
(2)电梯应该能够按照设定的速度曲线运行;
(3)当电梯上行时优先执行比当前层高的内选信号,下行同理;
(4)内选按钮或外呼按钮时应该有对应的指示灯发光;
(5)电梯的开始运行、运行结束和到达目的层均应该有语音播报;
(6)当有障碍物在门间的感应区时执行开门指令;
(7)当轿厢所载乘客重量大于预设值时,系统执行开门指令,并发出警示音提醒;
(8)当轿厢行驶与层门、轿厢门的打开形成互锁;
(9)安全保护装置应该充分应用到电梯的各个系统中。
如图3.2所示。
输入地址如表3.1所示。
数字量输入点:
(1)各楼层外呼状态指示灯
(2)各楼层内选按钮
(3)各楼层平层光电传感器(![]() )
)
(4)开门到位
(5)关门到位
(6)检修按钮
(7)电机转动COM
(8)24V电源
(9)各楼层平层信号SM
一层外呼上行 | I 126.4 | BOOL | 一层光电传感器(中)下 | I 124.0 | BOOL |
二层外呼下行 | I 126.5 | BOOL | 一层光电传感器(中)上 | I 124.1 | BOOL |
二层外呼上行 | I 126.6 | BOOL | 二层光电传感器(中)下 | I 124.2 | BOOL |
三层外呼下行 | I 126.7 | BOOL | 二层光电传感器(中)上 | I 124.3 | BOOL |
三层外呼上行 | I 0.0 | BOOL | 三层光电传感器(中)下 | I 124.4 | BOOL |
四层外呼下行 | I 0.1 | BOOL | 三层光电传感器(中)上 | I 124.5 | BOOL |
四层外呼上行 | I 0.2 | BOOL | 四层光电传感器(中)下 | I 124.6 | BOOL |
五层外呼下行 | I 0.3 | BOOL | 四层光电传感器(中)上 | I 124.7 | BOOL |
五层外呼上行 | I 0.4 | BOOL | 五层光电传感器(中)下 | I 125.0 | BOOL |
六层外呼下行 | I 0.5 | BOOL | 五层光电传感器(中)上 | I 125.1 | BOOL |
六层外呼上行 | I 0.6 | BOOL | 六层光电传感器(中)下 | I 125.2 | BOOL |
七层外呼下行 | I 0.7 | BOOL | 六层光电传感器(中)上 | I 125.3 | BOOL |
七层外呼上行 | I 4.0 | BOOL | 七层光电传感器(中)下 | I 125.4 | BOOL |
八层外呼下行 | I 4.1 | BOOL | 七层光电传感器(中)上 | I 125.5 | BOOL |
一层内呼 | I 1.0 | BOOL | 八层光电传感器(中)下 | I 125.6 | BOOL |
二层内呼 | I 1.1 | BOOL | 八层光电传感器(中)上 | I 125.7 | BOOL |
三层内呼 | I 1.2 | BOOL | 楼层光电传感器(中)SM | I 126.0 | BOOL |
四层内呼 | I 1.3 | BOOL | 电机转动COM | I 4.7 | BOOL |
五层内呼 | I 1.4 | BOOL | 24V电源 | I 4.5 | BOOL |
六层内呼 | I 1.5 | BOOL | 检修开关 | I 126.1 | BOOL |
七层内呼 | I 1.6 | BOOL | 开门到位 | I 126.2 | BOOL |
八层内呼 | I 1.7 | BOOL | 关门到位 | I 126.3 | BOOL |
输出地址如表3.2所示。
数字量输出点:
(1)数码管各段显示
(2)数码管上/下箭头控制显示
(3)各楼层内呼记忆
(4)开/关门控制
(5)电机正/反转控制
(6)电机启动/停止控制
(7)24V+电源
(8)各楼层外呼灯控制
数码管A段 | Q 125.6 | BOOL | 关门控制 | Q 4.1 | BOOL |
数码管B段 | Q 125.7 | BOOL | 电机正反转 | Q 4.3 | BOOL |
数码管C段 | Q 0.0 | BOOL | 电机起停 | Q 4.4 | BOOL |
数码管D段 | Q 0.1 | BOOL | 24V+电源 | Q 4.6 | BOOL |
数码管E段 | Q 0.2 | BOOL | 一层外呼上灯控制 | Q 124.0 | BOOL |
数码管F段 | Q 0.3 | BOOL | 二层外呼下灯控制 | Q 124.1 | BOOL |
数码管G段 | Q 0.4 | BOOL | 二层外呼上灯控制 | Q 124.2 | BOOL |
数码管向下箭头 | Q 0.5 | BOOL | 三层外呼下灯控制 | Q 124.3 | BOOL |
数码管向上箭头 | Q 0.6 | BOOL | 三层外呼上灯控制 | Q 124.4 | BOOL |
数码管负极 | Q 0.7 | BOOL | 四层外呼下灯控制 | Q 124.5 | BOOL |
一层内呼记忆 | Q 1.0 | BOOL | 四层外呼上灯控制 | Q 124.6 | BOOL |
二层内呼记忆 | Q 1.1 | BOOL | 五层外呼下灯控制 | Q 124.7 | BOOL |
三层内呼记忆 | Q 1.2 | BOOL | 五层外呼上灯控制 | Q 125.0 | BOOL |
四层内呼记忆 | Q 1.3 | BOOL | 六层外呼下灯控制 | Q 125.1 | BOOL |
五层内呼记忆 | Q 1.4 | BOOL | 六层外呼上灯控制 | Q 125.2 | BOOL |
六层内呼记忆 | Q 1.5 | BOOL | 七层外呼下灯控制 | Q 125.3 | BOOL |
七层内呼记忆 | Q 1.6 | BOOL | 七层外呼上灯控制 | Q 125.4 | BOOL |
八层内呼记忆 | Q 1.7 | BOOL | 八层外呼下灯控制 | Q 125.5 | BOOL |
开门控制 | Q 4.0 | BOOL | |||
本设计中电梯的运行速度曲线可采用下面两种方法:
(1)线性加速方式
图3.3给出了f与t。0~t1电梯加速,t2~t3 电梯减速。线性速度曲线可以在很大的程度上满足乘客乘坐电梯的舒适性,而且满足平层要求。

(2) S形加速方式
如图3.4所示。当电梯以S形曲线运行是会给乘客带来更高的舒适度。
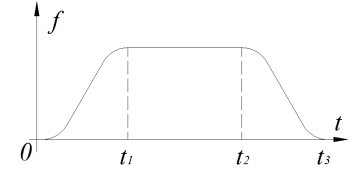
表3.3为616G5变频器参数设置参考说明。
参数 | 名称 | 设定值 | 说明 |
A1-02 | 控制方式选择 | 2 | 不带PG矢量控制方式 |
B1-01 | 频率指令选择 | 1 | |
B1-02 | 运行指令选择 | 1 | |
B1-03 | 停止方法选择 | 0 | |
B1-04 | 反转禁止选择 | 0 | |
B2-01 | 零速电平选择 | 0.1HZ | |
B2-04 | 停止时直流制动时间 | 1.0S | |
C1-03 | 加速时间2 | 2.0S | |
C1-04 | 减速时间2 | 2.0S | |
C2-01 | 加速开始时S型曲线时间 | 0.6S | |
C2-02 | 加速完成时S型曲线时间 | 0.6S | |
C2-03 | 减速开始时S型曲线时间 | 0.6S | |
C2-04 | 减速结束时S型曲线时间 | 0.6S | |
C5-01 | ASR比例增益1 | 5 | |
C5-02 | ASR积分时间1 | 3S | |
D1-09 | 检修速度 | 200rpm | |
E1-01 | 输入电压设置 | 380V | |
E1-04 | 最高输出频率 | 50HZ | |
E1-05 | 最大电压 | 380 | |
E1-06 | 额定电压频率 | 50HZ | |
E1-09 | 最低输出频率电压 | 0V | |
E2-01 | 电机额定电流 | 依据电机名牌设置 | |
E2-02 | 电机额定滑差 | 依据电机名牌设置 | |
E2-03 | 电机空载电流 | 依据电机名牌设置 | |
E2-04 | 电机极数 | 依据电机名牌设置 | |
F1-01 | PG常数 | 根据旋转编码器名牌设置 | |
F1-02 | PG断线检测时的动作选择 | 0 | |
F1-03 | 超速时的动作选择 | 0 | |
F1-04 | 超度偏差过大 | 0 | |
F1-05 | PG分频比 | 根据电机极数设置 |
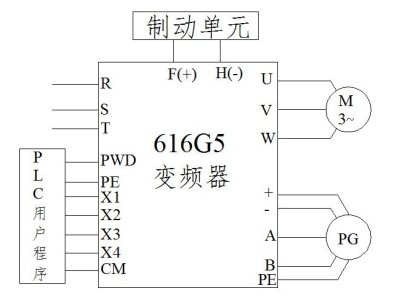
安川616G5变频器电气原理图如图3.5所示。
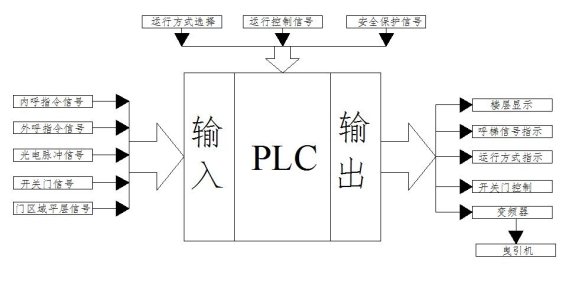
电梯系统是以PLC控制系统为核心的,图3.6示出了PLC控制的系统示意图。
PLC电气原理图如图3.7所示。
S7-200常用的指令表达方式有三种:梯形图、指令表、功能图[1]。
(1)位表示格式:标识符I 地址,例如I124.7。
(2)字节表示格式:标识符B 地址,例如IB10。
(3)字表示格式:标识符W 地址,例如MW2。
(4)双字表示格式:标识符D 地址,例如SMD4。
(1)基本逻辑“与”、“或”、“非”运算;
(2)置位、复位指令;
(3)定时器指令;
(4)计数器指令;
(5)比较操作指令。
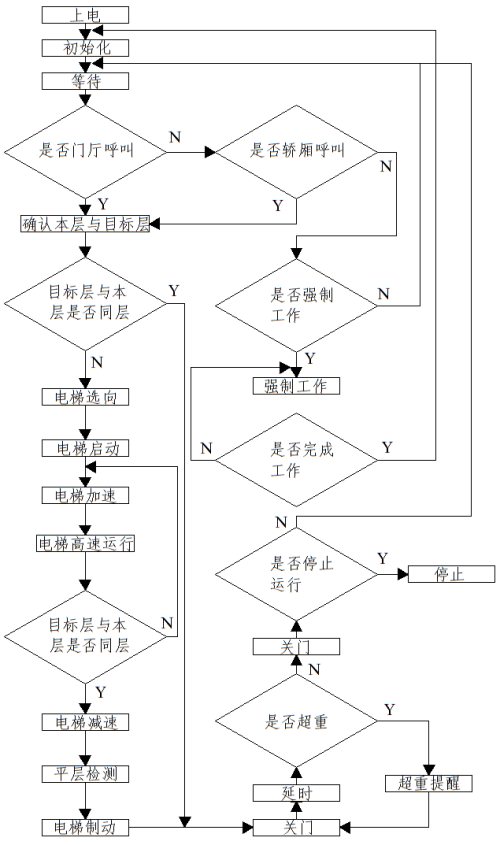
(1)自检:电梯的自检既是电梯在运行之前的自我检测,通过此种方式来确定电梯是否能够正常运行。
(2)自动工作:当有高于轿厢所在层的内选信号或者外呼信号时,控制系统来确定轿厢的运行方向,而后拖动系统按照变频器输出的S形曲线运行,到达目标层后,减速停止,并抱闸。延时一段时间执行关门指令。而后响应下一个内选或外呼信号。
(3)强制工作:强制工作模式的建立是为了应对电梯出现故障时的电梯检修。在这种工作状态下,不接受其他的内选和外呼信号,并且,在工程师的操纵下电梯应该可以运行到导轨上下极限的任意位置。
电梯工作流程图如图4.2所示。
此自动开关门程序由模拟电位器实现。其梯形图如图4.3所示。

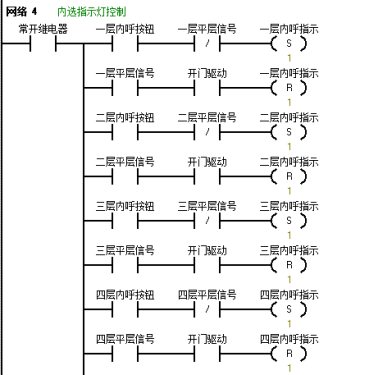
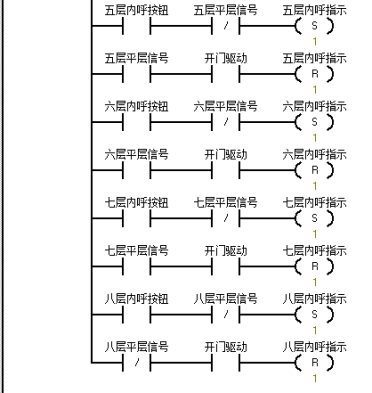
(1)内选指示灯
轿厢内控制面板上装有每层电梯的控制按钮。按下按钮,指示灯亮。其参考程序如图4.4梯形图所示。
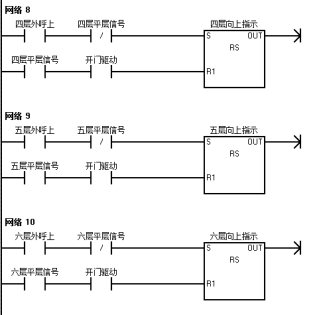
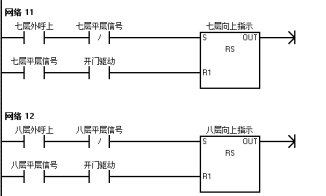
(2)外呼指示灯
它的参考程序如图4.5梯形图所示。

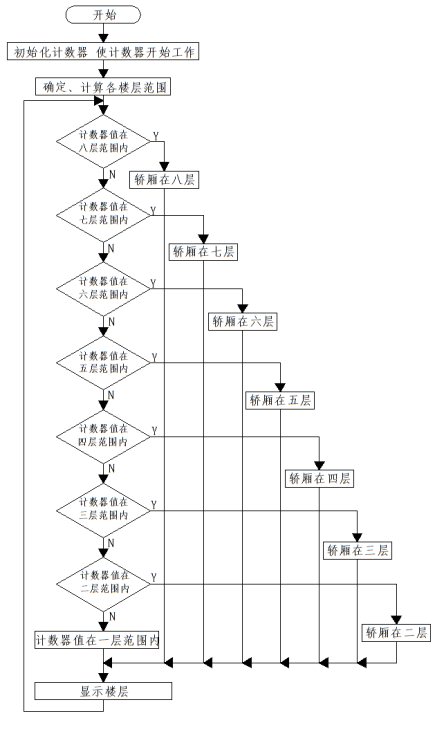
本设计用七段数码管来显示电梯的实时位置。随着轿厢位置的改变而不断的变化。其程序流程图如图4.6所示。
轿厢自动开关门的程序流程如图4.7所示。

如图4.8所示电梯上下行程序流程图。
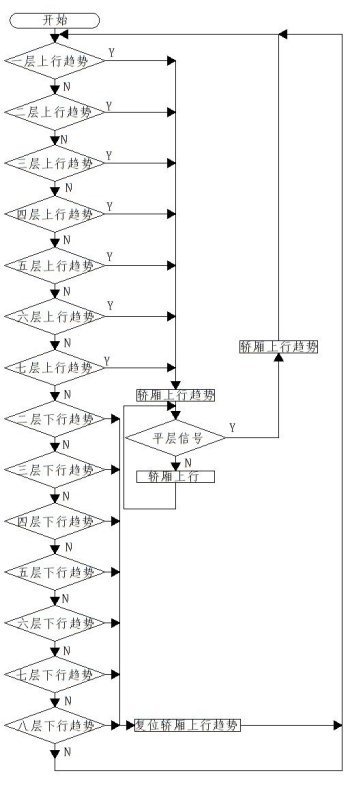
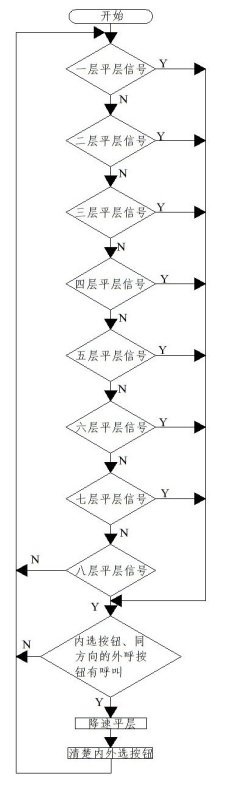
图4.9所示平层控制程序流程图。
如图4.10示出了电梯的总体运行效果图。

本设计主要对八层电梯系统进行了讨论和研究。本设计方案具有性能稳定、产品成型时间短、以及乘坐舒适、安全等特点。特别适合于一般的大型商场。论文所进行的主要内容有以下几个方面:
(1)查阅了电梯的发展历史,了解到对电梯发展起至关重要的几个阶段,新技术的产生对于电梯的发展起着至关重要的角色。
(2)对变频器和PLC进行了详细的介绍,确定使用变频器结合PLC对电梯拖动系统进行控制。并对比不同控制方法的优劣,以及确定使用西门子S-200PLC作为本设计的控制核心,采用安川616G5变频器对电机进行控制。并在此基础上对变频器和PLC进行了选型计算。
(3)对电梯的硬件系统进行了详细的介绍,明确了本设计所要达到的目标,进而对于变频器的参数进行了设置,对于PLC的点数进行了分配,介绍了电梯运行的速度曲线。
(4)对于电梯的控制程序进行了设计。
电梯系统的组成涵盖了多种技术、多种学科。相对于其他系统而言电梯控制系统比较复杂,非常综合,涉及的课题较多,工作量较大。结合实际,作者做出以下几方面的展望。
(1)实际中一般商场会有地下一层、地下二层,由于考虑到系统的复杂性,在本设计中没有考虑进去,而是直接从地上一层到地上八层进行的设计,所以在进一步的研究中要把地下停车场考虑进去。
(2)本设计为一台电梯的控制系统,然而实际上商场客流量非常大,一台电梯有时并不能满足需求,比较大的商场里面一般一个电梯见里面有三部或是四部电梯采用群控方式控制。所以在进一步的研究中应以群控系统为主。
(3)目前,电梯的运行单单仅靠编好的程序,就是那里有呼叫信号,轿厢向哪个楼层运行。没有考虑到楼层人数多少的影响。有时上班高峰一楼聚集了很多人,等待上八楼。五楼和六楼都有一个人等待上八楼。假如现在电梯在八楼则电梯会先去响应五楼和六楼的呼叫只有分别送五楼和六楼的人上了八楼,电梯才会到一楼,送一楼的人上八楼。这样就给数量多的人造成了麻烦。所以电梯应该具有智能系统,可以自行统计某一时间段,某一楼层人数,而后按照人数自动调节,首先响应人数多的楼层。
致谢
至此毕业设计完成之际,我由衷的感谢吴艳敏老师给予的悉心教导和指点。她博学多识、诲人不倦给我解答了很多疑难问题,这次毕业设计我才能顺利的完成。感谢负责此次毕业设计的教务组的老师们,感谢他们为此次毕业设计所做的充分准备,和耐心的督促。几年的大学时光对我来说是非常宝贵的,感谢所有授课的老师们,正是由于他们的教导和支持,使我学到了扎实的专业基础知识。感谢我的父母,是他们无私的支持让我可以走到现在。
完整的Word格式文档51黑下载地址:
 多层电梯控制.doc
(1.22 MB, 下载次数: 29)
多层电梯控制.doc
(1.22 MB, 下载次数: 29)
| 欢迎光临 (http://www.51hei.com/bbs/) | Powered by Discuz! X3.1 |