LED数码管显示实现原理简单,显示直观,编程简单,但显示内 容单一, 若要同时显示坐标轴, 区域位置等诸多信息则需要大量的数 码管,而且不能显示中文,由此增加了电路的复杂程度,也加大了编 程的难度。
LCD可以设置显示坐标轴等信息,它具有低功耗,可视面大,画 面友好及抗干扰能力强等功能,其显示技术已经得到广泛的应用。
按照设计的基本要求,系统可分为三大模块,数据采集模块、控 制器模块、 人机交互界面模块。 其中数据采集模块由电阻应变片传感器、信号的前级处理和 A/D 转换部分组成。 转换后的数字信号送给控
![]() 单 光敏
单 光敏
大器 器

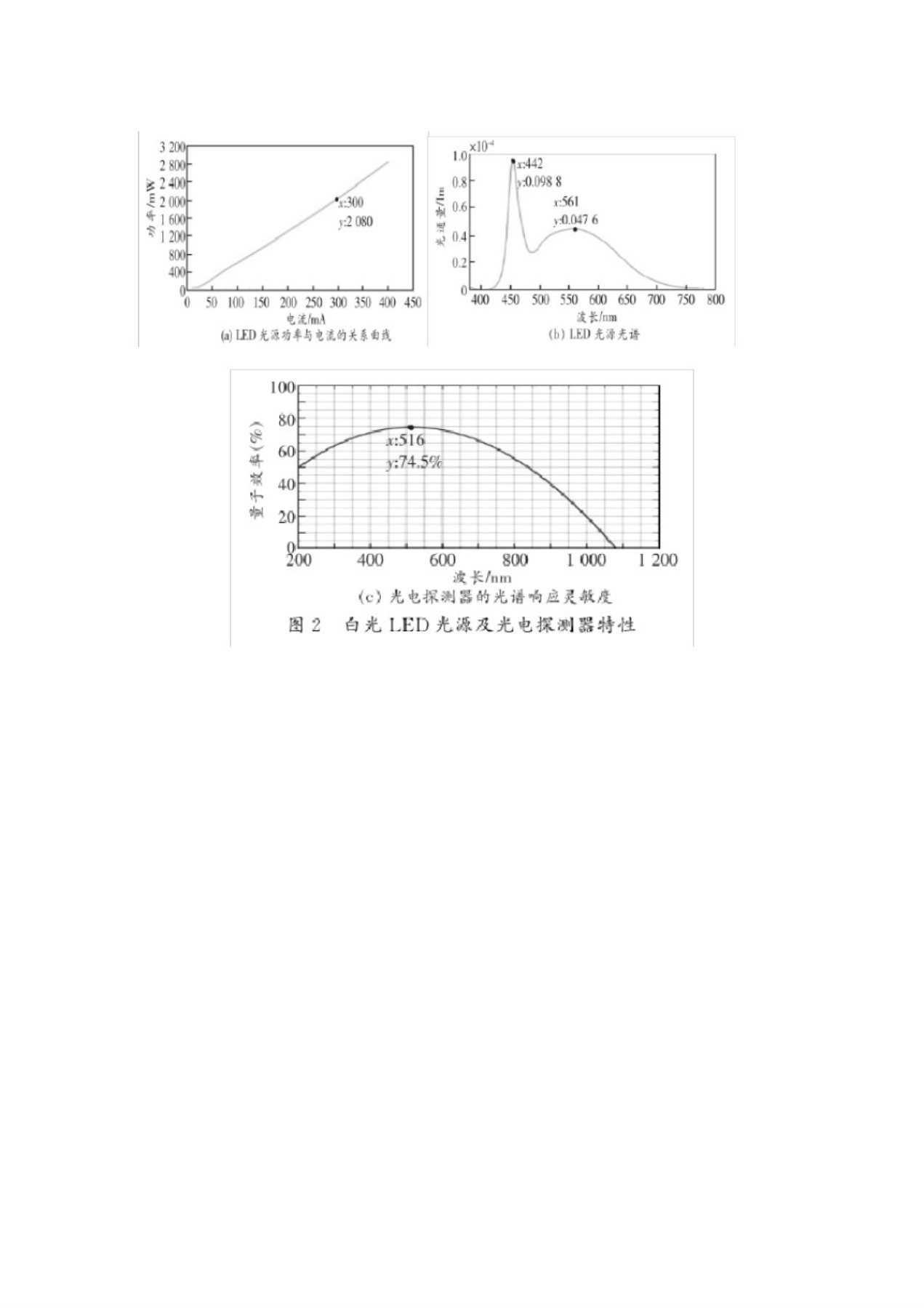
实验选用 3W 的大功率白光 LED 作为信号源 , 为在尽可能不影 响光源正常工作的前提下实现稳定可靠的无线通信 , 实验选用略低于 额定工作电流的 500mA 作为直流偏置点。图 2 所示为白光 LED 光 源及光电探测器特性。由图 2 ( a ) 可知 , 在最大工作电流范围内 ,LED 光源功率与电流呈线性关系 , 光源具有良好的调制特性。图 2 ( b ) 为使用积分球测得的白光 LED 发光光谱 ,可见白光 LED 光源发出的 光谱主要包括峰值在 442nm 处由LED 自身发出的蓝光和峰值在
561nm 处由荧光粉受激发产生的黄光。 而实验选用的光电探测器的光 谱最大响应灵敏度在 516nm 处 , 如图 2 ( c ) 所示 , 位于蓝光和黄光
LED 驱动电路除了提供足够宽范围的开关电流以保证白光 LED 的正常工作外 , 还须提供合适的静态工作点 , 使光源能输出足够的功 率并具有良好的线性度 , 确保信号经调制后能线性输出。设计的白光 LED光源驱动电路经过 STM89C52处理器编码产生的传输信息作为驱 动电路的输入 , 将输入信号进行放大的同时给予一定的偏置 , 确保 LED 光源正常工作 , 该电路可根据所用光源的特性通过调节可变电阻值实

数据传输的格式包括 : 起始码头、地址码、地址反码、指令码、指令反码和结束码。 码头由一个连续的 235φs 的高低电平组成 , 结束 码由一个 150φ s 低电平组成。地址码、地址反码、指令码和指令反 码均为 8 位数据格式 , 按照低位在前高位在后的顺序发送 , 增加地址 反码和指令反码是为了提高信息传输过程中的准确性和可靠性。 光源 在循环发送位置信息的过程中 , 在空闲时隙系统向 LED 光源发送的 均为高电平 , 以保证 LED 光源能正常提供照明服务。 我们将一个逻辑
1 的传输设定为 112φ s(28 φs 高电平和 84φs 低电平 ), 一个逻辑 0 的传输设定为 56φ s(28 φs 高电平和 28φ s 低电平 ), 具体数据编码格 式如图 3.3 所示。图 3.3 反映位置信息的数据格式 “ 0-256-34-221 ”, 其中“0 ”字段即 LED光源对应区域的地址坐标 , “34 ”字段表示 对当前坐标在室内环境中的一种具体提示指令。 根据标签定位技术的 特点 , 为避免在定位区域中出现待测目标同时接收多个信号源发来的 位置信息而出现的混乱现象 , 系统在发射端会对多个 LED 光源进行 分时发送信号。 当传输信号的频率大于 60Hz 时 , 白光 LED 灯不会出 现明显的闪烁现象 , 人眼也无法分辨 [11-12 ] , 但如果出现连续的逻 辑1 或连续的逻辑 0 时 , 将会导致 LED 光源发光亮度发生变化 , 影

在接收端 , 光电探测器将接收到的位置信息传送给滤波放大电路 , 由于实验中选用的是反向放大电路 , 因此经过滤波放大处理后的信号 与原始信号的相位相反 , 并且信号被整形为 TTL ( 晶体管 - 晶体管 逻辑 ) 电平的串行信息 , 利用 STC89C52R处C 理器的输入捕获功能对信 号进行解码。由于数据在编码时将逻辑 1 设定为连续的 28 φ s 高 电平和 84s 低电平 , 逻辑 0 设定为 28φ s 高电平和 28φs 低电平 , 反 向放大电路会使收发信号相位相反 , 因此接收端成功接收到的逻辑 1 应当为连续的 28φs 低电平和 84 φ s 高电平 , 逻辑 0 应当为 28φ s 低 电平和 28φs 高电平。同时逻辑电平中的低电平持续时间均为 28 φ
平 , 进一步处理后即可解析出原始的位置信息 , 大大降低了解码的复杂度。具体解码过程为如下 : 将 STC89C52R处C 理器的输入捕获模式设 置为上升沿捕获 , 当捕获到上升沿后 , 立即将输入捕获模式设置为下 降沿捕获 ( 即捕获高电平 ), 随后清零定时器的计数器值 , 并标记捕获 到上升沿。当下降沿到来时 , 立即更改输入捕获模式为上升沿捕获以
始码头开始 , 以此类推直到捕获到结束码则表示一组数据接收成功。 如果在捕获过程中地址码与地址反码或者指令码与指令反码有差异 , 则放弃本次捕获 , 从新开始下一次捕获。
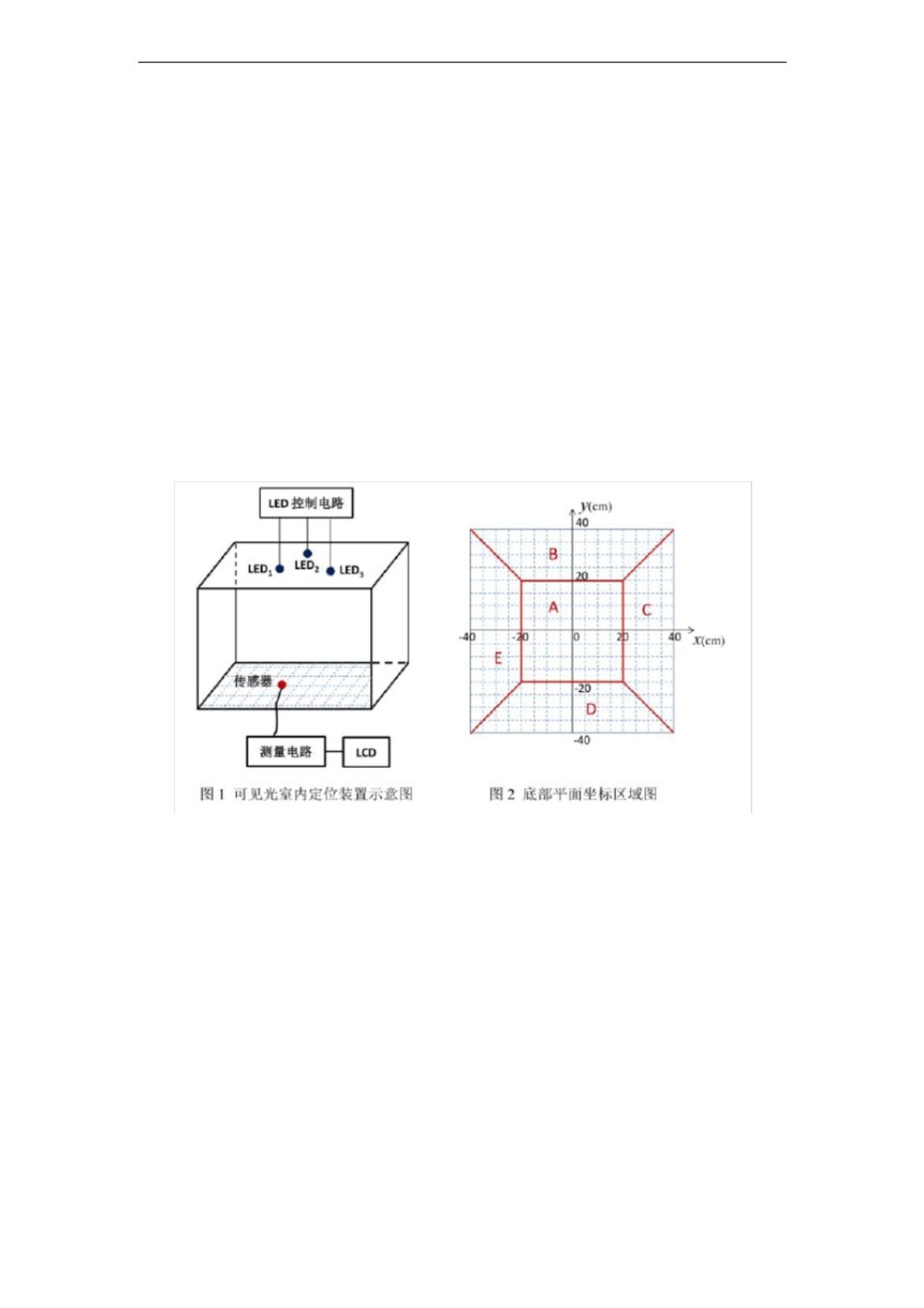
系统对所有用于定位的 LED 光源进行标号 , 不同的标号对应室 内环境中不同区域。每个 LED 光源都循环发送唯一的位置信息。当 移动终端移动到指定区域时 , 通过探测器将采集到的可见光信号转换 为电信号 , 经滤波放大后通过 STC89C52R处C 理器对信息进行解码。 当 系统解码出发射端所发送的位置信息后 , 通过 UART 模块将信息传送 至 PC 终端 ,而室内环境中 LED 光源的实际位置信息预先存在数据库中 , 当 PC 终端收到解码后的位置信息时会通过查询数据库来进行比较和识别 , 只有比对一致的位置信息才会进一步被映射到地图上 , 否则系统将放弃本次位置识别。 PC终端利用 C 高级语言编写并设计 了室内可见光定位助手软件 , 不仅可以根据环境需要灵活地更换地图 信息 , 还可以根据移动终端的位置变化来实时更新当前的位置信息。
本系统由 STC89C52RC最小系统板为核心,光敏传感器根据光照 强度分别检测 XY轴坐标。光敏传感器是利用光敏元件将光信号转换 为电信号的传感器,用来检测 XY轴距离。

考虑到其他部分所带来的干扰,所以我们选择 24 位的 A/D 转换器。作为电子秤,系统对 AD转换速度要求并不高,精度上 24 位的 A/D 足以满足要求。另外 A/D 转化器具有:抗干扰能力强和精确差分 输入,低廉的价格等优势 . 综合分析,我们最终选择了精度为准确的 HX711。


测试条件: 检查多次, 仿真电路和硬件电路必须与系统原理图完全相同,并且检查无误,硬件电路保证无虚焊。测试仪器:高精度的数字 毫伏表,模拟示波器,数字示波器,数字万用表。
可见光室内装置设计均采用模块化设计, 整个程序包括主程序、 数据 处理子程序 ( 双字节乘法、二一十进制转换程序及逆转换程序 ) 、 LCD 液晶静态显示子程序等模块。 所有程序均采用 C汇编语言编写。 可见 光室内装置的软件设计思路说明如下:主程序的作用为程序初始化, 计算单价单重 ( 单价和单重分别在定时中断程序和 INT0 外部中断程 序中获得 ) ,并时时显示 X、Y 轴的坐标。
AD转 换数 据
X、 Y 轴的 坐标 显示

此可见光室内定位装置,总体结构简洁、大方,底座等材料还属于废 品重新利用,符合可持续发展的环保道路,而且其构造稳固,有利于 系统性能的发挥。检测出来的数据显示,其总体性能比较好,机械性 能不错,如果经济允许,换上更加优质的元器件, 其性能会更加完美。
通过这次比赛,我们收获匪浅。学到了很多全新的知识,比如 A/D 数模转换, 更加深了对 AT89C52系统板的使用和性能; 在制作的过程中 一步一步走向目的地; 最重要的是这四天三夜的奋战增强了我们的合 作精神,促进了我们的友谊!
 室内可见光定位装置.pdf
(1.09 MB, 下载次数: 285)
室内可见光定位装置.pdf
(1.09 MB, 下载次数: 285)

a1329166892 发表于 2018-4-18 15:47
毕设做这个,请问可以分享更多资料吗
憧憬or泡沫 发表于 2018-2-26 22:58
**** 作者被禁止或删除 内容自动屏蔽 ****
小狗吃大白菜 发表于 2018-3-11 21:07
楼主想问下PDF里面的程序是全部程序吗?我正在做这个
| 欢迎光临 (http://www.51hei.com/bbs/) | Powered by Discuz! X3.1 |