
2014ј¶ІвҝШјјКхУлТЗЖчЧЁТөЧЫәПҝОіМЙијЖ
Дҝ Вј
ХӘ ТӘ I
1 ЙијЖИООсКй
1.1 Йжј°ЧЁТөҝОіМ (1)
1.2 ЙијЖИООс (1)
1.3 ЙијЖДҝұк (1)
1.4 ұҫЙијЖөДЦчТӘ№ҰДЬ (2)
1.5 ұҫХВРЎҪб (2)
2 ЙијЖВЫЦӨј°јЖ»®
2.1 ҝОіМЙијЖұіҫ°ј°ЙијЖТвТе (3)
2.2 ЙијЖІЙУГИнјюј°№ж»® (3)
2.3 ұҫХВРЎҪб (4)
3 УІјюПөНіЙијЖ
3.1 ЧЬМе·Ҫ°ёЙијЖ (5)
3.2 ФӘЖчјюөДСЎРНј°·ЦОц (5)
3.3 ПөНіДЈҝй№ҰДЬј°ҪУҝЪЙијЖ (13)
3.4 ұҫХВРЎҪб (15)
4 ИнјюПөНіЙијЖ
4.1 ИнјюПөНіЧЬМе·Ҫ°ёЙијЖ (16)
4.2 ИнјюБчіМЙијЖ (16)
4.3 іМРтҙъВлЙијЖУл·ЦОц (17)
4.4 ұҫХВРЎҪб (23)
5 іМРтФШИлУлөчКФ
5.1 өчКФ»·ҫіУл№ӨҫЯ (24)
5.2 өчКФ№эіМј°ПЦПу·ЦОц (24)
6 ЧЬҪбУлХ№Ны
6.1 ҝОіМЙијЖЧЬҪб (30)
6.2 №ӨЧчХ№Ны (30)
ёҪ ВјA ЙијЖіМРт (31)
ёҪ Вј B ЙијЖІОҝјЧКБП (37)
2014ј¶ІвҝШјјКхУлТЗЖчЧЁТөЧЫәПҝОіМЙијЖ
1 ЙијЖИООсКй
- Йжј°ЧЁТөҝОіМ
ұҫЙијЖЦчТӘЙжј°өДЧЁТөҝОіМУР:
1ЎўөҘЖ¬»ъФӯАнј°УҰУГ
2ЎўРЕәЕ·ЦОцУлҙҰАн
3ЎўјЖЛг»ъҝШЦЖјјКх
4Ўўҙ«ёРЖчјјКх
5ЎўөзЧУПЯВ·CAD
6ЎўКэЧЦөзЧУјјКх
7ЎўёҙұдәҜКэУл»э·Цұд»»
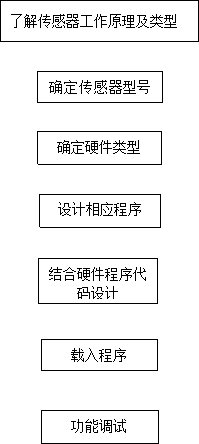
- ЙијЖИООс
- ЙијЖДҝұк
ёщҫЭЙијЖИООсІўНкіЙТФПВДҝұк
- БЛҪвБщЦбҙ«ёРЖчMPU6050№ӨЧчФӯАнТФј°Жд№ӨЧч·ҪКҪЎЈ
- КмБ·ФЛУГARMНкіЙ¶Фҙ«ёРЖчөДІЩЧчУлҝШЦЖЈ»
- ҙ«ёРЖчКэҫЭНЁ№эҙ®ҝЪНЁРЕФЪЙПО»»ъЙПДЈДвПФКҫЈ»
- ПөНіУлКЦ»ъНЁ№эА¶САҪшРРКэҫЭҙ«КдЈ»
- ұҫЙијЖөДЦчТӘ№ҰДЬ
- ұҫЙијЖөДЦчТӘ№ҰДЬ
- ұҫХВРЎҪб
ҪбәПЛщС§ҝОіМәНЙијЖИООсЈ¬ЦЖ¶ЁБЛПаУҰөД№ӨЧчИООсЈ¬әПАн№ж»®№ӨЧчІҪЦиЎЈ
2 ЙијЖВЫЦӨј°јЖ»®- ҝОіМЙијЖұіҫ°ј°ЙијЖТвТе
- ЙијЖІЙУГИнјюј°ЙијЖ№ж»®
- ұҫХВРЎҪб
- ЧЬМеЙијЖ·Ҫ°ё
- ФӘЖчјюөДСЎРНј°·ЦОц
3.2.1MCUөДСЎРНј°·ЦОц
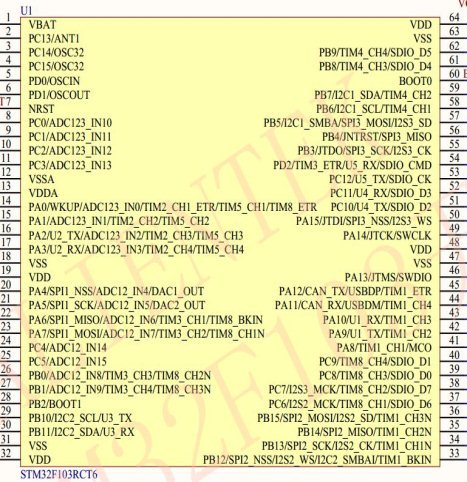
STM32F103RCT6ФӯАнНј,ИзНј3.2ЛщКҫЎЈ
Нј3.2 MCUФӯАнНј
3.2.2 ҙ«ёРЖчөДСЎРНј°·ЦОц
ўЩ ТФКэЧЦРОКҪКдіц 6 Цб»т 9 ЦбЈЁРиНвҪУҙЕҙ«ёРЖчЈ©өДРэЧӘҫШХуЎўЛДФӘКэ(quaternion)ЎўЕ·АӯҪЗёсКҪөДИЪәПСЭЛгКэҫЭЈЁРи DMP Ц§іЦЈ©ЎЈ

MPU6050ҙ«ёРЖчКөОпНјИз3.3ЛщКҫЈ¬ЖдјмІвЦбИзНј3.4ЛщКҫЎЈ
3.3 MPU6050КөОпНј
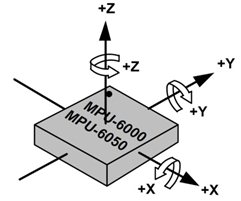
Нј3.4 MPU605јмІвЦб·ҪПт
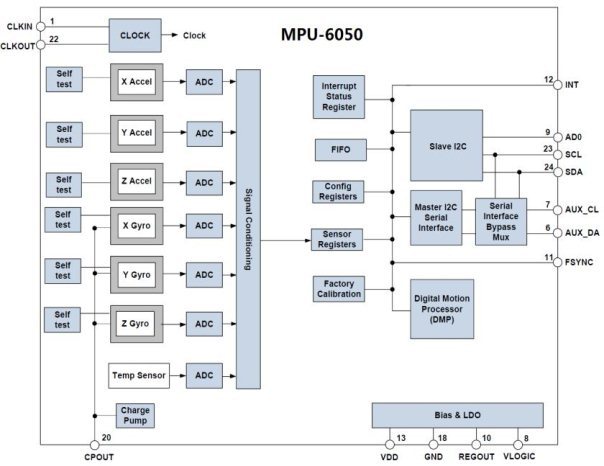
MPU6050өДДЪІҝҝтНјИзНј3.5ЛщКҫЎЈ

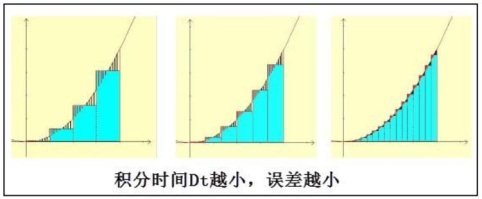
НУВЭТЗјмІвТІІ»КЗНкИ«ҫ«И·өДЈ¬ҙжФЪТ»¶ЁөДОуІоЎЈУЙУЪНУВЭТЗІвБҝҪЗ¶ИКұК№УГ»э

УЙУЪЦұҪУУГНУВЭТЗІвБҝҪЗ¶ИФЪіӨКұјдІвБҝКұ»бІъЙъАЫјЖОуІоЈ¬ТэИлБЛјмІвЗгҪЗөДҙ«ёРЖчЎЈІвБҝЗгҪЗЧоіЈјыөДАэЧУКЗҪЁЦюЦРК№УГөДЛ®ЖҪТЗЈ¬ФЪЦШБҰөДУ°ПмПВЈ¬Л®ЖҪТЗДЪөДЖшЕЭДЬҙуЦВ·ҙУіЛ®ЦщЛщФЪЦұПЯУлЦШБҰ·ҪПтөДјРҪЗ№ШПөЈ¬АыУГНј3.8ЦРөДTЧЦРНЛ®ЖҪТЗЈ¬ҝЙТФјмІвіцәб№цҪЗУлё©СцҪЗЈ¬¶шЖ«әҪҪЗКЗОЮ·ЁТФХвСщөД·ҪКҪјмІвөДЎЈФЪөзЧУЙиұёЦРЈ¬Т»°гК№УГјУЛЩ¶Иҙ«ёРЖчАҙјмІвЗгҪЗЈ¬ЛьНЁ№эјмІвЖчјюФЪёчёц·ҪПтөДРОұдЗйҝц¶шІЙСщөГөҪКЬБҰКэҫЭЈ¬ёщҫЭF=maЧӘ»»Ј¬ҙ«ёРЖчЦұҪУКдіцјУЛЩ¶ИКэҫЭЈ¬Тт¶шұ»іЖОӘјУЛЩ¶Иҙ«ёРЖчЎЈУЙУЪөШЗтҙжФЪЦШБҰіЎЈ¬ЛщТФЦШБҰФЪИОәОКұҝМ¶ј»бЧчУГУЪҙ«ёРЖчЈ¬өұҙ«ёРЖчҫІЦ№өДКұәт(КөјКЙПјУЛЩ¶ИОӘ0)Ј¬ҙ«ёРЖч»бФЪёГ·ҪПтјмІвіцјУЛЩ¶ИgЈ¬І»ДЬИПОӘЦШБҰ·ҪПтІвіцөДјУЛЩ¶ИОӘgЈ¬ҫНұнКҫҙ«ёРЖчФЪёГ·ҪПтЧчјУЛЩ¶ИОӘgөДФЛ¶ҜЎЈ
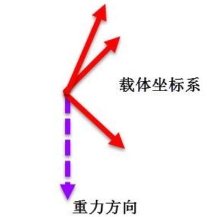
өұҙ«ёРЖчөДЧЛМ¬І»Н¬КұЈ¬ЛьФЪЧФЙнёчёцЧшұкЦбјмІвөҪөДЦШБҰјУЛЩ¶ИКЗІ»Т»СщАыУГ
ёч·ҪПтөДІвБҝҪб№ыЈ¬ёщҫЭБҰөД·ЦҪвФӯАнЈ¬ҝЙЗуіцёчёцЧшұкЦбУлЦШБҰЦ®јдөДјРҪЗЈ¬ИзНј3.9ЛщКҫЎЈ
- ПөНіДЈҝй№ҰДЬј°ҪУҝЪЙијЖ
MPU6050ТэҪЕЛөГч
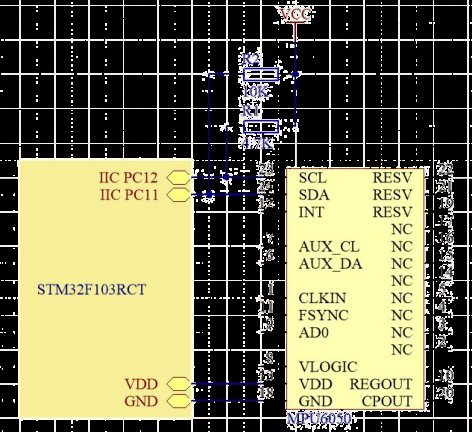
ЛщТӘУГөҪөДУІјюЧКФҙЦчТӘУРSTM32ҝӘ·ў°еәНMPU6050ДЈҝйЈ¬ЛьГЗөДБ¬ҪУ·ҪКҪИзНј3.10ЛщКҫЎЈMPU6050ДЈҝйУлНвІҝБ¬ҪУЈ¬ТэіцБЛVCCЎўGNDЎўIIC_SDAЎўIIC_SCLЎўMPU_INTәНMPU_AD0өИРЕәЕЎЈЖдЦРЈ¬IIC_SDAәНIIC_SCLҙшБЛ4.7KЙПАӯөзЧиЈ¬НвІҝҝЙТФІ»УГФЩјУЙПАӯөзЧиБЛЈ¬БнНвMPU_AD0ЧФҙшБЛ10KПВАӯөзЧиЈ¬өұAD0 РьҝХКұЈ¬Д¬ИПIICөШЦ·ОӘЈЁ0X68Ј©ЎЈДЈҝйөДIIC_SCLЎўIIC_SDA·ЦұрБ¬ҪУФЪSTM32өДPC12ЎўPC11ЙПГжЎЈXDAәНXCLКЗУГАҙА©Х№Б¬ҪУҙЕБҰҙ«ёРЖчК№MPU6050ЧӘ»»ОӘЎ°ҫЕЦбҙ«ёРЖчЎұЎЈ
- ұҫХВРЎҪб
4 ИнјюПөНіЙијЖ
- ИнјюПөНіЧЬМе·Ҫ°ёЙијЖ
- ИнјюБчіМЙијЖ
- іМРтҙъВлЙијЖУл·ЦОц
- ЦчәҜКэҙъВлЙијЖУл·ЦОц
- ЦчәҜКэҙъВлЙијЖУл·ЦОц
- ТФПВКЗmainәҜКэЦРЦРЧоЦчТӘөДІҝ·ЦіМРт
- ҙ®ҝЪ·ўЛНіМРтЈә
- void usart1_send_char(u8 c)
- {
- while((USART1->SR&0X40)==0);//өИҙэЙПТ»ҙО·ўЛННкұП
- USART1->DR=c;
- }
- //ҙ«ЛНКэҫЭёшЙПО»»ъИнјю(
- void usart1_niming_report(u8 fun,u8*data,u8 len)
- {
- u8 send_buf[32];
- u8 i;
- if(len>28)return; //Чо¶а28ЧЦҪЪКэҫЭ
- send_buf[len+3]=0; //РЈСйКэЦГБг
- send_buf[0]=0X88; //ЦЎН·
- send_buf[1]=fun; //№ҰДЬЧЦ
- send_buf[2]=len; //КэҫЭіӨ¶И
- for(i=0;i<len;i++)send_buf[3+i]=data[i]; //ёҙЦЖКэҫЭ
- for(i=0;i<len+3;i++)send_buf[len+3]+=send_buf[i]; //јЖЛгРЈСйәН
- for(i=0;i<len+4;i++)usart1_send_char(send_buf[i]); //·ўЛНКэҫЭөҪҙ®ҝЪ1
- }
- //·ўЛНјУЛЩ¶Иҙ«ёРЖчКэҫЭәННУВЭТЗКэҫЭ
- //aacx,aacy,aacz:x,y,zИэёц·ҪПтЙПГжөДјУЛЩ¶ИЦө
- //gyrox,gyroy,gyroz:x,y,zИэёц·ҪПтЙПГжөДНУВЭТЗЦө
- void mpu6050_send_data(short aacx,short aacy,short aacz,short gyrox,short gyroy,short gyroz)
- НЁ№эҙ®ҝЪЙПұЁҪбЛгәуөДЧЛМ¬КэҫЭёшөзДФЈә
- //aacx,aacy,aacz:x,y,zИэёц·ҪПтЙПГжөДјУЛЩ¶ИЦө
- //gyrox,gyroy,gyroz:x,y,zИэёц·ҪПтЙПГжөДНУВЭТЗЦө
- //roll:әб№цҪЗ.өҘО»0.01¶ИЎЈ -18000 - 18000 ¶ФУҰ -180.00 - 180.00¶И
- //pitch:ё©СцҪЗ.өҘО» 0.01¶ИЎЈ-9000 - 9000 ¶ФУҰ -90.00 - 90.00 ¶И
- //yaw:әҪПтҪЗ.өҘО»ОӘ0.1¶И 0 ЁC 360ЎЈ0¶И ¶ФУҰ 0 -> 360.0¶И
- void usart1_report_imu(short aacx,short aacy,short aacz,short gyrox,short gyroy,short gyroz,short roll,short pitch,short yaw)
- LCDіхКј»ҜЈә
- int main(void)
- {
- u8 t=0,report=1; //Д¬ИПҝӘЖфЙПұЁ
- u8 key;
- float pitch,roll,yaw; //Е·АӯҪЗ
- short aacx,aacy,aacz; //јУЛЩ¶Иҙ«ёРЖчФӯКјКэҫЭ
- short gyrox,gyroy,gyroz; //НУВЭТЗФӯКјКэҫЭ
- short temp; //ОВ¶И
- NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
- delay_init(); //СУКұәҜКэіхКј»Ҝ
- uart_init(500000); //ҙ®ҝЪіхКј»ҜОӘ9600
- usmart_dev.init(72); //іхКј»ҜUSMART
- LED_Init(); //іхКј»ҜУлLEDБ¬ҪУөДУІјюҪУҝЪ
- KEY_Init(); //іхКј»Ҝ°ҙјь
- LCD_Init(); //іхКј»ҜLCD
- MPU_Init(); //іхКј»ҜMPU6050
- POINT_COLOR=RED; //ЙиЦГЧЦМеОӘәмЙ«
- ПФКҫЖБПФКҫКэҫЭЈә
- LCD_ShowString(30,50,200,16,16,"Wang Kai");
- LCD_ShowString(30,70,200,16,16,"MPU6050 TEST");
- LCD_ShowString(30,90,200,16,16,"HPU");
- LCD_ShowString(30,110,200,16,16,"2018/3/12");
- while(mpu_dmp_init())
- {
- LCD_ShowString(30,130,200,16,16,"MPU6050 Error");
- delay_ms(200);
- LCD_Fill(30,130,239,130+16,WHITE);
- delay_ms(200);
- }
- LCD_ShowString(30,130,200,16,16,"MPU6050 OK");
- LCD_ShowString(30,150,200,16,16,"KEY0:UPLOAD ON/OFF");
- POINT_COLOR=BLUE;//ЙиЦГЧЦМеОӘА¶Й«
- LCD_ShowString(30,170,200,16,16,"UPLOAD ON ");
- LCD_ShowString(30,200,200,16,16," Temp: . C");
- LCD_ShowString(30,220,200,16,16,"Pitch: . C");
- LCD_ShowString(30,240,200,16,16," Roll: . C");
- LCD_ShowString(30,260,200,16,16," Yaw : . C");
- LCD_ShowString(30,280,200,16,16," Durriculum Design ");
- if(mpu_dmp_get_data(&pitch,&roll,&yaw)==0)
- {
- temp=MPU_Get_Temperature(); //өГөҪОВ¶ИЦө
- MPU_Get_Accelerometer(&aacx,&aacy,&aacz); //өГөҪјУЛЩ¶Иҙ«ёРЖчКэҫЭ
- MPU_Get_Gyroscope(&gyrox,&gyroy,&gyroz); //өГөҪНУВЭТЗКэҫЭ
- if(report)mpu6050_send_data(aacx,aacy,aacz,gyrox,gyroy,gyroz);//УГЧФ¶ЁТеЦЎ·ўЛНјУЛЩ¶ИәННУВЭТЗФӯКјКэҫЭ
- ФӯКјКэҫЭҙҰАнЈә if(report)usart1_report_imu(aacx,aacy,aacz,gyrox,gyroy,gyroz,(int)(roll*100),(int)(pitch*100),(int)(yaw*10));
- if((t%10)==0)
- {
- if(temp<0)
- {
- LCD_ShowChar(30+48,200,'-',16,0); //ПФКҫёәәЕ
- temp=-temp; //ЧӘОӘХэКэ
- }else LCD_ShowChar(30+48,200,' ',16,0);//ИҘөфёәәЕ
- LCD_ShowNum(30+48+8,200,temp/100,3,16);//ПФКҫХыКэІҝ·Ц LCD_ShowNum(30+48+40,200,temp%10,1,16);//ПФКҫРЎКэІҝ·Ц temp=pitch*10;
- if(temp<0)
- {
- LCD_ShowChar(30+48,220,'-',16,0); //ПФКҫёәәЕ
- temp=-temp; //ЧӘОӘХэКэ
- }else LCD_ShowChar(30+48,220,' ',16,0);//ИҘөфёәәЕ
- LCD_ShowNum(30+48+8,220,temp/10,3,16); //ПФКҫХыКэІҝ·Ц LCD_ShowNum(30+48+40,220,temp%10,1,16); //ПФКҫРЎКэІҝ·Ц
- temp=roll*10;
- if(temp<0)
- {
- LCD_ShowChar(30+48,240,'-',16,0); //ПФКҫёәәЕ
- temp=-temp; //ЧӘОӘХэКэ
- }else LCD_ShowChar(30+48,240,' ',16,0);//ИҘөфёәәЕ
- LCD_ShowNum(30+48+8,240,temp/10,3,16); //ПФКҫХыКэІҝ·Ц
- LCD_ShowNum(30+48+40,240,temp%10,1,16);//ПФКҫРЎКэІҝ·Ц
- temp=yaw*10;
- if(temp<0)
- {
- LCD_ShowChar(30+48,260,'-',16,0); //ПФКҫёәәЕ
- temp=-temp; //ЧӘОӘХэКэ
- }else LCD_ShowChar(30+48,260,' ',16,0);//ИҘөфёәәЕ
- LCD_ShowNum(30+48+40,260,temp%10,1,16);//ПФКҫРЎКэІҝ·Ц
- t=0;
- LED0=!LED0;//LEDЙБЛё
- }
- }
-
- 4.3.2 MPU6050іМРт·ЦОц
- MPU6050іМРтіхКј»ҜЈә
- u8 MPU_Init(void)
- {
- u8 res;
- MPU_IIC_Init();//іхКј»ҜIICЧЬПЯ
- MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X80); //ёҙО»MPU6050
- delay_ms(100);
- MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X00); //»ҪРСMPU6050
- MPU_Set_Gyro_Fsr(3); //НУВЭТЗҙ«ёРЖч,ЎА2000dps
- MPU_Set_Accel_Fsr(0); //јУЛЩ¶Иҙ«ёРЖч,ЎА2g
- MPU_Set_Rate(50); //ЙиЦГІЙСщВК50Hz
- MPU_Write_Byte(MPU_INT_EN_REG,0X00); //№ШұХЛщУРЦР¶П
- MPU_Write_Byte(MPU_USER_CTRL_REG,0X00);//I2CЦчДЈКҪ№ШұХ
- MPU_Write_Byte(MPU_FIFO_EN_REG,0X00); //№ШұХFIFO
- MPU_Write_Byte(MPU_INTBP_CFG_REG,0X80);//INTТэҪЕөНөзЖҪУРР§
- res=MPU_Read_Byte(MPU_DEVICE_ID_REG);
- if(res==MPU_ADDR)//ЖчјюIDХэИ·
- {
- MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X01);//ЙиЦГCLKSEL,PLL XЦбОӘІОҝј
- MPU_Write_Byte(MPU_PWR_MGMT2_REG,0X00);//јУЛЩ¶ИУлНУВЭТЗ¶ј№ӨЧч
- MPU_Set_Rate(50); //ЙиЦГІЙСщВКОӘ50Hz
- }else return 1;
- return 0;
- }
- //ЙиЦГMPU6050НУВЭТЗҙ«ёРЖчВъБҝіМ·¶О§
- //fsr:0,ЎА250dps;1,ЎА500dps;2,ЎА1000dps;3,ЎА2000dps
- //·ө»ШЦө:0,ЙиЦГіЙ№Ұ
- // ЖдЛы,ЙиЦГК§°Ь
- u8 MPU_Set_Gyro_Fsr(u8 fsr)
- {
- return MPU_Write_Byte(MPU_GYRO_CFG_REG,fsr<<3);//ЙиЦГНУВЭТЗВъБҝіМ·¶О§
- }
- ЙиЦГMPU6050јУЛЩ¶Иҙ«ёРЖчВъБҝіМ·¶О§
- //fsr:0,ЎА2g;1,ЎА4g;2,ЎА8g;3,ЎА16g
- //·ө»ШЦө:0,ЙиЦГіЙ№Ұ
- // ЖдЛы,ЙиЦГК§°Ь
- u8 MPU_Set_Accel_Fsr(u8 fsr)
- {
- return MPU_Write_Byte(MPU_ACCEL_CFG_REG,fsr<<3);//ЙиЦГјУЛЩ¶Иҙ«ёРЖчВъБҝіМ·¶О§
- }
- //ЙиЦГMPU6050өДКэЧЦөННЁВЛІЁЖч
- //lpf:КэЧЦөННЁВЛІЁЖөВК(Hz)
- //·ө»ШЦө:0,ЙиЦГіЙ№Ұ
- // ЖдЛы,ЙиЦГК§°Ь
- ұҫХВРЎҪб
5 іМРтФШИлУлөчКФ
- өчКФ»·ҫіУл№ӨҫЯ
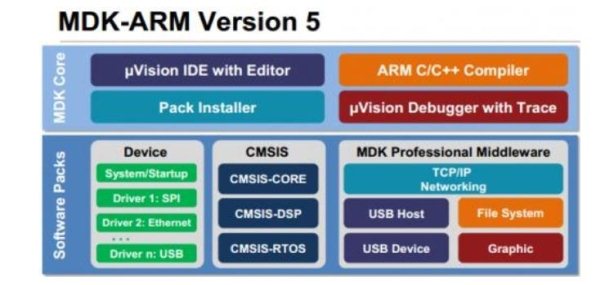
MDKФҙЧФөВ№ъөДKEIL№«ЛҫЈ¬КЗRealView MDKөДјтіЖЎЈФЪИ«ЗтMDKұ»і¬№э10НтөДЗ¶ИлКҪҝӘ·ў№ӨіМКҰК№УГЎЈДҝЗ°ЧоРВ°жұҫОӘЈәMDK5.14Ј¬ёГ°жұҫК№УГuVision5 IDE јҜіЙҝӘ·ў»·ҫіЈ¬КЗДҝЗ°Хл¶ФARMҙҰАнЖчЈ¬УИЖдКЗCortex M ДЪәЛҙҰАнЖчөДЧојСҝӘ·ў№ӨҫЯЎЈMDK5 ПтәујжИЭMDK4әНMDK3өИЈ¬ТФЗ°өДПоДҝН¬СщҝЙТФФЪMDK5ЙПҪшРРҝӘ·ў(ө«КЗН·ОДјю·ҪГжөГИ«ІҝЧФјәМнјУ)Ј¬MDK5Н¬КұјУЗҝБЛХл¶Ф Cortex-MОўҝШЦЖЖчҝӘ·ўөДЦ§іЦЈ¬ІўЗТ¶Фҙ«НіөДҝӘ·ўДЈКҪәНҪзГжҪшРРЙэј¶Ј¬MDK5УЙБҪёцІҝ·ЦЧйіЙЈәMDK Core әН Software PacksЎЈЖдЦРЈ¬Software Packs ҝЙТФ¶АБўУЪ№ӨҫЯБҙҪшРРРВРҫЖ¬Ц§іЦәНЦРјдҝвөДЙэј¶ЎЈИзНј5.1ЛщКҫЎЈ
Нј5.1 MDKјЬ№№Нј
- өчКФ№эіМј°ПЦПу·ЦОц
- УІјюБ¬ҪУ
- УІјюБ¬ҪУ
Нј5.2 ПөНіБ¬ҪУНј
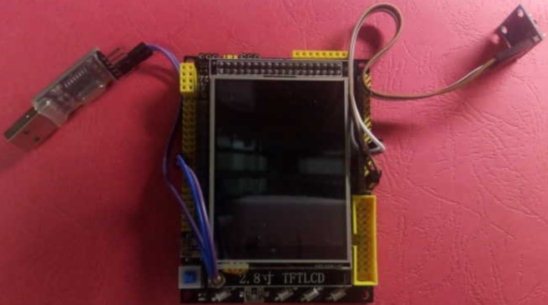
КөОпБ¬ҪУНјЈ¬ИзНј5.3ЛщКҫЎЈ
5.2.2іМРтЙХВј

ЙХВјЗ°Ҫ«әЛРД°еУлөзДФНЁ№э·ВХжЖчБ¬ҪУЖрАҙЈ¬°С·ВХжЖч°С·ВХжЖчУГ USB ПЯБ¬ҪУөзДФЈ¬Из№ы·ВХжЖчөДөЖББФтұнКҫХэіЈЈ¬ҝЙТФК№УГЎЈИ»әу°С·ВХжЖчөДБнНвТ»¶ЛБ¬ҪУөҪҝӘ·ў°еЈ¬ёшҝӘ·ў°еЙПөзЈ¬И»әуҫНҝЙТФНЁ№эИнјюMDKёшҝӘ·ў°еПВФШіМРтЎЈИзНј5.4ЛщКҫј°КөОпБ¬ҪУНјИз5.5ЛщКҫЎЈ
Нј5.4 ·ВХжЖчУлөзДФәНҝӘ·ў°еБ¬ҪУ·ҪКҪ
 №ӨіМИнјюЕдЦГИзНј5.6ЛщКҫЎЈ
№ӨіМИнјюЕдЦГИзНј5.6ЛщКҫЎЈ

Нј5.6 №ӨіМЕдЦГНј
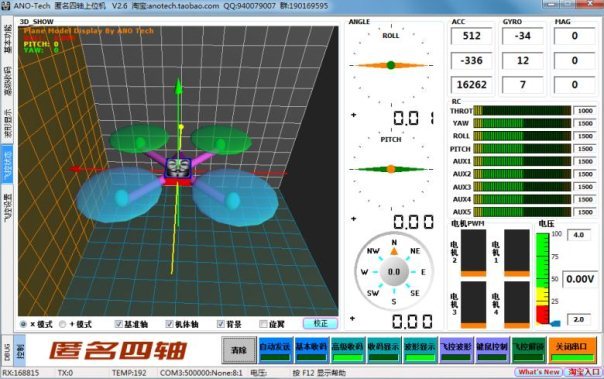
- КөСйПЦПуј°·ЦОц

ЖБД»ПФКҫБЛMPU6050өДОВ¶ИЎўё©СцҪЗЈЁpitchЈ©Ўўәб№цҪЗЈЁrollЈ©әНәҪПтҪЗЈЁyawЈ©өДКэЦөЎЈ»О¶ҜMPU6050ҙ«ёРЖчёчҪЗ¶ИЛжЦ®ұд»ҜЎЈБнНвЈ¬НЁ№э°ҙKEY0ҝЙТФҝӘЖф»т№ШұХКэҫЭЙПұЁЈ¬ҝӘЖфЧҙМ¬ПВЈ¬ҙтҝӘөзДФ¶ЛЙПО»»ъЈ¬ҪУКХSTM32F1ЙПҙ«өДКэҫЭЈ¬ҙУ¶шНјРО»ҜПФКҫҙ«ёРЖчКэҫЭЎЈҙ«ёРЖчКэҫЭІЁРОПФКҫИзНј5.8ЛщКҫЎЈ
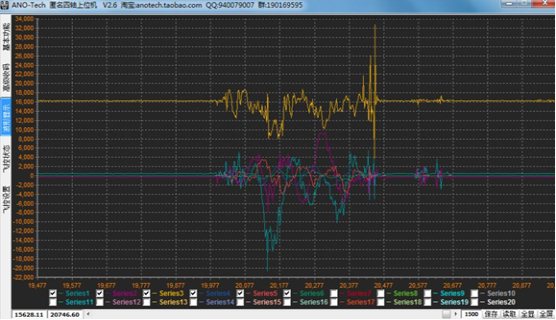
Нј5.8 ЙПО»»ъІвКФНј
ҝОіМЙијЖЧЬҪб
№ӨЧчХ№Ны
- void usart1_send_char(u8 c)
- {
- while((USART1->SR&0X40)==0);//өИҙэЙПТ»ҙО·ўЛННкұП
- USART1->DR=c;
- }
- //ҙ«ЛНКэҫЭёшДдГыЛДЦбЙПО»»ъИнјю(V2.6°жұҫ)
- //fun:№ҰДЬЧЦ. 0XA0~0XAF
- //data:КэҫЭ»әҙжЗш,Чо¶а28ЧЦҪЪ!!
- //len:dataЗшУРР§КэҫЭёцКэ
- void usart1_niming_report(u8 fun,u8*data,u8 len)
- {
- u8 send_buf[32];
- u8 i;
- if(len>28)return; //Чо¶а28ЧЦҪЪКэҫЭ
- send_buf[len+3]=0; //РЈСйКэЦГБг
- send_buf[0]=0X88; //ЦЎН·
- send_buf[1]=fun; //№ҰДЬЧЦ
- send_buf[2]=len; //КэҫЭіӨ¶И
- for(i=0;i<len;i++)send_buf[3+i]=data[i]; //ёҙЦЖКэҫЭ
- for(i=0;i<len+3;i++)send_buf[len+3]+=send_buf[i]; //јЖЛгРЈСйәН
- for(i=0;i<len+4;i++)usart1_send_char(send_buf[i]); //·ўЛНКэҫЭөҪҙ®ҝЪ1
- }
- //·ўЛНјУЛЩ¶Иҙ«ёРЖчКэҫЭәННУВЭТЗКэҫЭ
- //aacx,aacy,aacz:x,y,zИэёц·ҪПтЙПГжөДјУЛЩ¶ИЦө
- //gyrox,gyroy,gyroz:x,y,zИэёц·ҪПтЙПГжөДНУВЭТЗЦө
- void mpu6050_send_data(short aacx,short aacy,short aacz,short gyrox,short gyroy,short gyroz)
- {
- u8 tbuf[12];
- tbuf[0]=(aacx>>8)&0XFF;
- tbuf[1]=aacx&0XFF;
- tbuf[2]=(aacy>>8)&0XFF;
- tbuf[3]=aacy&0XFF;
- tbuf[4]=(aacz>>8)&0XFF;
- tbuf[5]=aacz&0XFF;
- tbuf[6]=(gyrox>>8)&0XFF;
- tbuf[7]=gyrox&0XFF;
- tbuf[8]=(gyroy>>8)&0XFF;
- tbuf[9]=gyroy&0XFF;
- tbuf[10]=(gyroz>>8)&0XFF;
- tbuf[11]=gyroz&0XFF;
- usart1_niming_report(0XA1,tbuf,12);//ЧФ¶ЁТеЦЎ,0XA1
- }
- //НЁ№эҙ®ҝЪ1ЙПұЁҪбЛгәуөДЧЛМ¬КэҫЭёшөзДФ
- //aacx,aacy,aacz:x,y,zИэёц·ҪПтЙПГжөДјУЛЩ¶ИЦө
- //gyrox,gyroy,gyroz:x,y,zИэёц·ҪПтЙПГжөДНУВЭТЗЦө
- //roll:әб№цҪЗ.өҘО»0.01¶ИЎЈ -18000 -> 18000 ¶ФУҰ -180.00 -> 180.00¶И
- //pitch:ё©СцҪЗ.өҘО» 0.01¶ИЎЈ-9000 - 9000 ¶ФУҰ -90.00 -> 90.00 ¶И
- //yaw:әҪПтҪЗ.өҘО»ОӘ0.1¶И 0 -> 3600 ¶ФУҰ 0 -> 360.0¶И
- void usart1_report_imu(short aacx,short aacy,short aacz,short gyrox,short gyroy,short gyroz,short roll,short pitch,short yaw)
- {
- u8 tbuf[28];
- u8 i;
- for(i=0;i<28;i++)tbuf[i]=0;//Зе0
- tbuf[0]=(aacx>>8)&0XFF;
- tbuf[1]=aacx&0XFF;
- tbuf[2]=(aacy>>8)&0XFF;
- tbuf[3]=aacy&0XFF;
- tbuf[4]=(aacz>>8)&0XFF;
- tbuf[5]=aacz&0XFF;
- tbuf[6]=(gyrox>>8)&0XFF;
- tbuf[7]=gyrox&0XFF;
- tbuf[8]=(gyroy>>8)&0XFF;
- tbuf[9]=gyroy&0XFF;
- tbuf[10]=(gyroz>>8)&0XFF;
- tbuf[11]=gyroz&0XFF;
- tbuf[18]=(roll>>8)&0XFF;
- tbuf[19]=roll&0XFF;
- tbuf[20]=(pitch>>8)&0XFF;
- tbuf[21]=pitch&0XFF;
- tbuf[22]=(yaw>>8)&0XFF;
- tbuf[23]=yaw&0XFF;
- usart1_niming_report(0XAF,tbuf,28);//·ЙҝШПФКҫЦЎ,0XAF
- }
-
-
- int main(void)
- {
- u8 t=0,report=1; //Д¬ИПҝӘЖфЙПұЁ
- u8 key;
- float pitch,roll,yaw; //Е·АӯҪЗ
- short aacx,aacy,aacz; //јУЛЩ¶Иҙ«ёРЖчФӯКјКэҫЭ
- short gyrox,gyroy,gyroz; //НУВЭТЗФӯКјКэҫЭ
- short temp; //ОВ¶И
-
- NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
- delay_init(); //СУКұәҜКэіхКј»Ҝ
- uart_init(500000); //ҙ®ҝЪіхКј»ҜОӘ9600
- usmart_dev.init(72); //іхКј»ҜUSMART
- LED_Init(); //іхКј»ҜУлLEDБ¬ҪУөДУІјюҪУҝЪ
- KEY_Init(); //іхКј»Ҝ°ҙјь
- LCD_Init(); //іхКј»ҜLCD
- MPU_Init(); //іхКј»ҜMPU6050
- POINT_COLOR=RED; //ЙиЦГЧЦМеОӘәмЙ«
- LCD_ShowString(30,50,200,16,16,"Wang Kai");
- LCD_ShowString(30,70,200,16,16,"MPU6050 TEST");
- LCD_ShowString(30,90,200,16,16,"HPU");
- LCD_ShowString(30,110,200,16,16,"2018/3/12");
- while(mpu_dmp_init())
- {
- LCD_ShowString(30,130,200,16,16,"MPU6050 Error");
- delay_ms(200);
- LCD_Fill(30,130,239,130+16,WHITE);
- delay_ms(200);
- }
- LCD_ShowString(30,130,200,16,16,"MPU6050 OK");
- LCD_ShowString(30,150,200,16,16,"KEY0:UPLOAD ON/OFF");
- POINT_COLOR=BLUE;//ЙиЦГЧЦМеОӘА¶Й«
- LCD_ShowString(30,170,200,16,16,"UPLOAD ON ");
- LCD_ShowString(30,200,200,16,16," Temp: . C");
- LCD_ShowString(30,220,200,16,16,"Pitch: . C");
- LCD_ShowString(30,240,200,16,16," Roll: . C");
- LCD_ShowString(30,260,200,16,16," Yaw : . C");
- LCD_ShowString(30,280,200,16,16," Durriculum Design ");
- while(1)
- {
- key=KEY_Scan(0);
- if(key==KEY0_PRES)
- {
- report=!report;
- if(report)LCD_ShowString(30,170,200,16,16,"UPLOAD ON ");
- else LCD_ShowString(30,170,200,16,16,"UPLOAD OFF");
- }
- if(mpu_dmp_get_data(&pitch,&roll,&yaw)==0)
- {
- temp=MPU_Get_Temperature(); //өГөҪОВ¶ИЦө
- MPU_Get_Accelerometer(&aacx,&aacy,&aacz); //өГөҪјУЛЩ¶Иҙ«ёРЖчКэҫЭ
- MPU_Get_Gyroscope(&gyrox,&gyroy,&gyroz); //өГөҪНУВЭТЗКэҫЭ
- if(report)mpu6050_send_data(aacx,aacy,aacz,gyrox,gyroy,gyroz);//УГЧФ¶ЁТеЦЎ·ўЛНјУЛЩ¶ИәННУВЭТЗФӯКјКэҫЭ
- if(report)usart1_report_imu(aacx,aacy,aacz,gyrox,gyroy,gyroz,(int)(roll*100),(int)(pitch*100),(int)(yaw*10));
- if((t%10)==0)
- {
- if(temp<0)
- {
- LCD_ShowChar(30+48,200,'-',16,0); //ПФКҫёәәЕ
- temp=-temp; //ЧӘОӘХэКэ
- }else LCD_ShowChar(30+48,200,' ',16,0);//ИҘөфёәәЕ
- LCD_ShowNum(30+48+8,200,temp/100,3,16);//ПФКҫХыКэІҝ·Ц
- LCD_ShowNum(30+48+40,200,temp%10,1,16);//ПФКҫРЎКэІҝ·Ц
- temp=pitch*10;
- if(temp<0)
- {
- LCD_ShowChar(30+48,220,'-',16,0); //ПФКҫёәәЕ
- temp=-temp; //ЧӘОӘХэКэ
- }else LCD_ShowChar(30+48,220,' ',16,0);//ИҘөфёәәЕ
- LCD_ShowNum(30+48+8,220,temp/10,3,16); //ПФКҫХыКэІҝ·Ц
- LCD_ShowNum(30+48+40,220,temp%10,1,16);//ПФКҫРЎКэІҝ·Ц
- temp=roll*10;
- if(temp<0)
- {
- LCD_ShowChar(30+48,240,'-',16,0); //ПФКҫёәәЕ
- temp=-temp; //ЧӘОӘХэКэ
- }else LCD_ShowChar(30+48,240,' ',16,0);//ИҘөфёәәЕ
- LCD_ShowNum(30+48+8,240,temp/10,3,16); //ПФКҫХыКэІҝ·Ц
- LCD_ShowNum(30+48+40,240,temp%10,1,16);//ПФКҫКэІҝ·Ц
- temp=yaw*10;
- if(temp<0)
- {
- LCD_ShowChar(30+48,260,'-',16,0); //ПФКҫёәәЕ
- temp=-temp; //ЧӘОӘХэКэ
- }else LCD_ShowChar(30+48,260,' ',16,0);//ИҘөфёәәЕ
- LCD_ShowNum(30+48+8,260,temp/10,3,16);//ПФКҫХыКэІҝ·Ц
- LCD_ShowNum(30+48+40,260,temp%10,1,16);//ПФКҫРЎКэІҝ·Ц
- t=0;
- LED0=!LED0;//LEDЙБЛёЈ»
- }
- }
- t++;
- }
- }
НкХыөДWordёсКҪОДөө51әЪПВФШөШЦ·Јә
 ЗгҪЗјУЛЩ¶ИјмІв.doc
(1.3 MB, ПВФШҙОКэ: 35)
ЗгҪЗјУЛЩ¶ИјмІв.doc
(1.3 MB, ПВФШҙОКэ: 35)
| »¶Уӯ№вБЩ (http://www.51hei.com/bbs/) | Powered by Discuz! X3.1 |