标题:
STM32多功能智能小车制作(循迹+壁障+遥控)源码
[打印本页]
作者:
lu19951007
时间:
2018-5-8 11:01
标题:
STM32多功能智能小车制作(循迹+壁障+遥控)源码
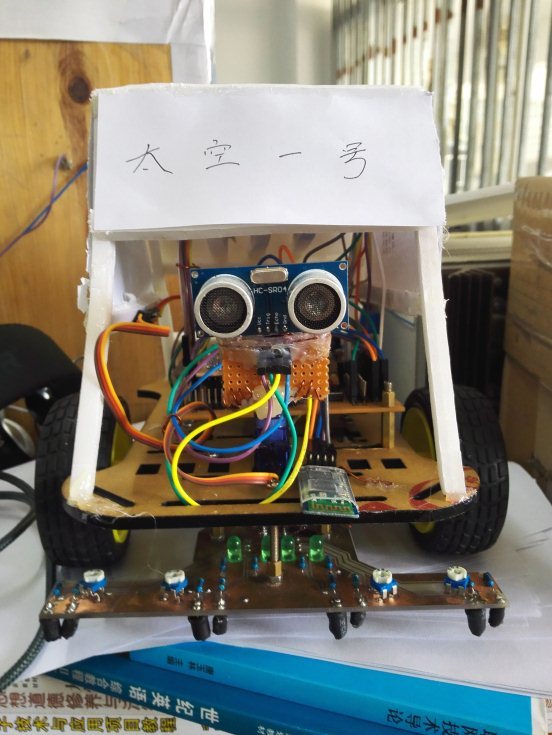
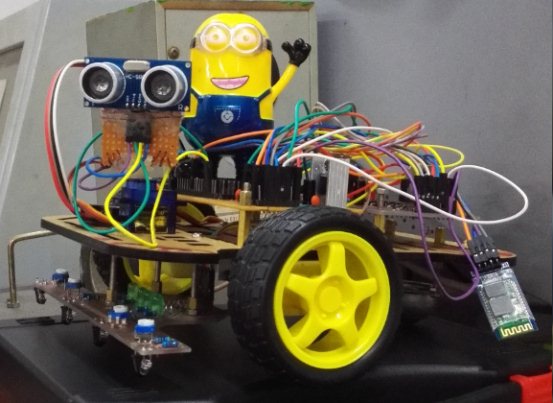
分享一个STM32 自巡逻避障小车。 共勉
多
功能智能
小车
功能:循迹+避障+遥控
制作难点:
1.超声波,舵机,电机三者的协调。
2.实时快速反应,整个过程的程序要流畅,不能停留在某一处。
3.STM32超声波捕获也是一个亮点。
程序的亮点:
蓝牙HC-06模块使用STM32 DMA控制器,使小车在循迹+避障+遥控功能的切换中运行流畅,解决了蓝牙串口发送数据延迟问题。
超声波,舵机,电机三者的协调得比较好。
总结:刚开始软硬件搭配不挡,没有按照科学的方法一步一步排除遇到的问题。让很容易解决的问题拖了很久,浪费了很多时间。同时,由于没考虑到stm32这块主控芯片的电压安全问题,烧了几块芯片。这是我们得到的教训。总的来说,功能全部实现。
单片机源程序如下:
/**
******************************************************************************
* @file main.c
* @author MCD Application Team
* @version V3.5.0
* @date 08-April-2011
* @brief Main program body
**/
/* Includes ------------------------------------------------------------------*/
#include "stm32f10x.h"
#include "usart1.h"
#include "SysTick.h"
#include "motor_control.h"
#include "UltrasonicWave.h"
#include "TIM3.h"
#include "pwm_output.h"
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
/* Private macro -------------------------------------------------------------*/
/* Private variables ---------------------------------------------------------*/
vu32 Onward_flag=0;
vu8 RxBuffer[2];
vu32 PWM_flag=0;
vu32 Left_flag=0;
vu32 Right_flag=0;
vu32 Backward_flag=0;
vu32 Stop_flag=0;
vu32 Xunji_flag=0;
vu32 Auto_flag=0;
vu8 count=0;
/* Private function prototypes -----------------------------------------------*/
void NVIC_Configuration(void);
/* Private functions ---------------------------------------------------------*/
/*******************************************************************************
* 函数名 : main
* 描述 : 主函数
* 输入 : 无
* 输出 : 无
* 返回 : 无
*******************************************************************************/
int main(void)
{
/* NVIC configuration */
NVIC_Configuration();
/* Configure the Usart1 */
USART1_Config();
/* Configure the DMA1 */
DMA_Configuration();
/* Configure the GPIO */
GPIO_Configuration();
/* Configure the TIM2 */
TIM2_Configuration();
/* Configure the TIM3 */
TIM4_Configuration();
/* Configure the TIM4 */
Control_GPIOE_Config(); /*配置传感器输入信号管脚*/
// TIM4_Configuration();
TIM3_GPIO_Config();
/* Configure the systick */
SysTick_Init();
/* Configure the UltrasonicWave */
UltrasonicWave_Configuration();
Degree(85,1);
// Delay_ms(1500);
while (1)
{
// Auto_run();
if(Onward_flag==1)
{
Forward_run(); //前进
}
else if(Backward_flag==1)
{
Backward_run(); //后退
}
else if(Left_flag==1)
{
Left_turn(); //左转
}
else if(Right_flag==1)
{
Right_turn(); // 右转
}
else if(Auto_flag==1)
{
Auto_run(); //自动避障行驶
}
else if(Xunji_flag==1)
{
Xunji_run(); //自动循迹行驶
}
else
{
Stop(); //暂停
}
}
}
/*******************************************************************************
* 函数名 : NVIC_Configuration
* 描述 : 初始化NVIC
* 输入 : 无
* 输出 : 无
* 返回 : 无
*******************************************************************************/
void NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
/* Configure the Priority Group to 2 bits */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitStructure.NVIC_IRQChannel = DMA1_Channel5_IRQn ; // Enable the DMA_Channel5 Interrupt
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = TIM4_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
/******************* (C) COPYRIGHT 2011 STMicroelectronics *****END OF FILE****/
复制代码
所有资料51hei提供下载:
stm32-超声波避障.rar
(3.15 MB, 下载次数: 74)
2018-5-8 17:17 上传
点击文件名下载附件
下载积分: 黑币 -5
作者:
魔谷18
时间:
2018-5-10 14:40
请问有没有具体的电路图,提供参考,谢谢
作者:
孤独者!
时间:
2018-5-12 19:51
用什么模块做电机驱动?
作者:
WITHER
时间:
2018-5-19 16:57
用什么模块做电机驱动?298N?
作者:
WITHER
时间:
2018-5-19 16:59
很好的。用什么模块做电机驱动?
作者:
hack906447
时间:
2019-4-7 14:15
源码在MOTOR的文档中对GPIO的配置有问题
作者:
马良马良
时间:
2019-4-11 10:24
好,非常好
作者:
御魔之彩羽
时间:
2019-4-14 15:11
你好,请问一下编译时显示缺少stdint的头文件该怎么办?
作者:
此非非彼菲
时间:
2019-4-14 22:34
强者的帖子
欢迎光临 (http://www.51hei.com/bbs/)
Powered by Discuz! X3.1
 stm32-超声波避障.rar
(3.15 MB, 下载次数: 74)
stm32-超声波避障.rar
(3.15 MB, 下载次数: 74)