双车追逐与超车系统(B题)
【本科组】
1系统设计
1.1 设计要求
1.1.1 总体要求设计两辆智能小车。甲车车头紧靠起点标志线,乙车车尾紧靠边界,甲、乙两辆小车同时启动,先后通过起点标志线,在行车道内同向而行,实现双车追逐与超车功能,跑道如图1所示。
图1.1 跑道图
1.1.2 基本部分(1)甲车、乙车分别从起点标志线开始,在行车道各正常行驶一圈(15分)。
(2)甲、乙两辆小车在图1所示位置同时启动,开始双车追逐,在甲车通过超车标志区时视为双车追逐结束。此过程中,两车间距始终小于30cm(20分)。
(3)甲、乙两车在完成基础要求(2)时的行驶时间小于10秒(10分)。
(4)完成基础要求(2)后,乙车通过超车标志线后在超车区内实现超车功能,并先于甲车到达终点标志线,即实现乙车超过甲车,若超车时间小于5秒,得25分。(25分)。
1.1.3 发挥部分(1)在完成基础要求(4)后,甲,乙两车继续行驶第二圈,要求甲车通过超车标志线后实现超车功能(20分)。
(2)甲,乙两车行驶第二圈总时间不超过10秒(10分)。
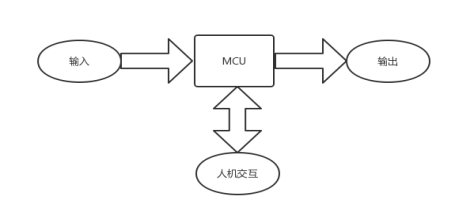
2系统方案本系统主要由输入模块、输出模块、人机交互模块组成,下面分别论证这几个模块的选择。
2.1 驱动电机的论证与选择方案一:采用直流电机作为系统的主要动力机构,直流电机是日常生活中比较常用 的电机类型,可以采用L298N 芯片对直流电机的控制,但直流电机无法精确控制;本次设计要用到两个电机相互配合来控制小车转弯的角度以及双车追逐之间的距离,要求很高的精度,直流电机较难实现。
方案二:舵机。 舵机体积小, 安装方便,其转动的角度用脉冲来进行控制,能做到精确转动,且转动力矩比同质量的直流电机或步进电机都大,转动的范围有限, 不适合本系统。
方案三:采用步进电机作为系统的主要动力机构,步进电机通过脉冲控制,每次可以走一个很小的角度,这就可以满足本题精确控制小车转弯的角度以及双车追逐之间的距离的要求。
综合以上三种方案,选择方案三。
2.2 人机交互与输入模块的论证与选择 应题目要求,按键作为人机交互模块,光电传感器对赛道数据进行采集。这两个模块固定。
3系统总体设计3.1系统硬件的设计3.1.1系统总体框图系统总体框图如图所示
图3.1 系统总体框图
3.1.2 输入模块与电路原理图 光电传感器作为数据采集端。
图3.2 红外光电传感器实物图
图3.3 红外光电传感器原理图
3.1.3 输出模块与电路原理图 步进电机空系统的执行端。
图3.4 步进电机实物图
图3.5 步进电机驱动电路图
3.1.4 人机交互模块与电路原理图 按键KEY用于人机交互。
图3.6 按键电路图
3.2系统软件的设计3.2.1程序功能描述与设计思路1、程序功能描述
根据题目要求软件部分主要实现按键控制小车按指定距离走完一圈和超车功能。
2、程序设计思路
我们从系统设计出发,根据硬件系统设计,将软件设计分为硬件层、驱动层、应用层。这样设计符合模块化思想,有助于代码调试、阅读、学习。
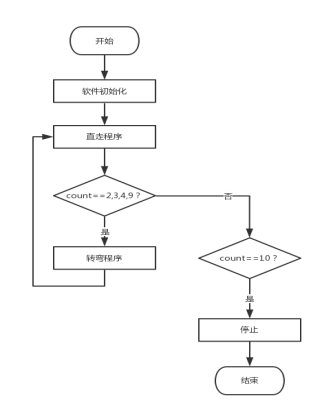
3.2.2程序流程图1、主程序流程图
2、转圈与追逐功能流程图
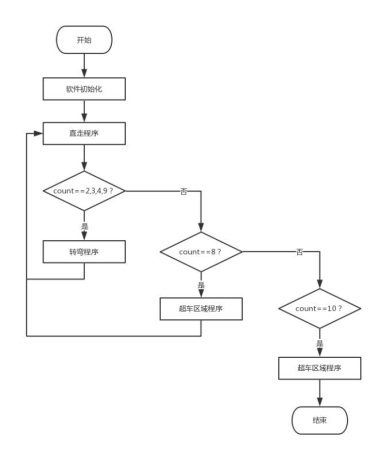
3、超车功能流程图
4、直走子程序流程图
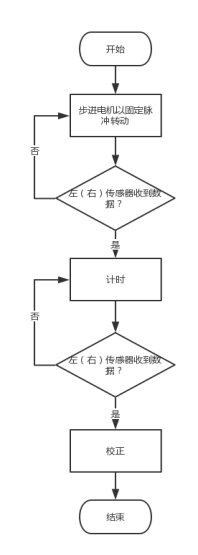
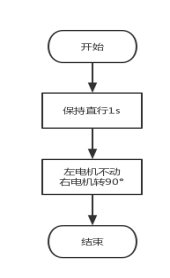
5、转弯子程序流程图
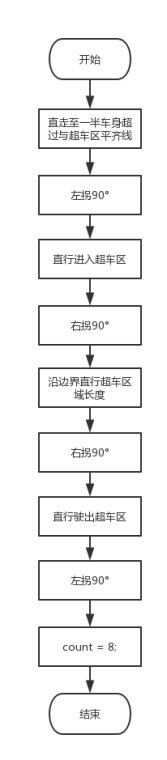
6、超车子程序流程图
附录1:源程序
全部资料51hei下载地址(word格式的论文内含清晰图片):








 智能小车追逐超车系统.zip
(2.86 MB, 下载次数: 33)
智能小车追逐超车系统.zip
(2.86 MB, 下载次数: 33)