实验一 金属箔式应变片——单臂电桥性能实验
一、实验目的:了解金属箔式应变片的应变效应,单臂电桥工作原理和性能。
二、基本原理:电阻丝在外力作用下发生机械变形时,其电阻值发生变化,这就是电阻应变效应,描述电阻应变效应的关系式为:
![]()
式中![]() 为电阻丝电阻的相对变化,
为电阻丝电阻的相对变化,![]() 为应变灵敏系数,
为应变灵敏系数,![]() 为电阻丝长度相对变化,金属箔式应变片就是通过光刻、腐蚀等工艺制成的应变敏感元件,通过它转换被测部位的受力状态变化,电桥的作用是完成电阻到电压的比例变化,电桥的输出电压反映了相应的受力状态。单臂电桥输出电压
为电阻丝长度相对变化,金属箔式应变片就是通过光刻、腐蚀等工艺制成的应变敏感元件,通过它转换被测部位的受力状态变化,电桥的作用是完成电阻到电压的比例变化,电桥的输出电压反映了相应的受力状态。单臂电桥输出电压![]() O1
O1![]() 。
。
三、需用器件与单元:应变式传感器实验模块、砝码、数显表(主控台上电压表)、±15V电源、±4V电源、万用表(自备)。
四、实验步骤:
1、检查应变传感器的安装
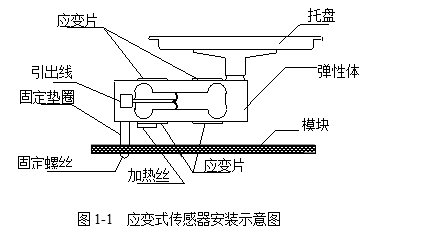
根据图1-1应变式传感器已装于应变传感器模块上。传感器中各应变片已接入模块的左上方的R1、R2、R3、R4。加热丝也接于模块上,可用万用表进行测量判别,各应变片初始阻值R1=R2=R3=R4=351±2Ω,加热丝初始阻值为20-50Ω左右。
2、差动放大器的调零
首先将实验模块调节增益电位器Rw3顺时针到底(即此时放大器增益最大。然后将差动放大器的正、负输入端相连并与地短接,输出端与主控台上的电压表输入端Vi相连。检查无误后从主控台上接入模块电源±15V以及地线。合上主控台电源开关,调节实验模块上的调零电位器Rw4,使电压表显示为零(电压表的切换开关打到2V档)。关闭主控箱电源。(注意: Rw4的位置一旦确定,就不能改变,一直到做完实验为止)
3、电桥调零
适当调小增益Rw3(顺时针旋转3-4圈,电位器最大可顺时针旋转5圈),将应变式传感器的其中一个应变片R1(即模块左上方的R1)接入电桥(如图)作为一个桥臂与R5、R6、R7接成直流电桥(R5、R6、R7模块内已连接好,其中模块上虚线电阻符号为示意符号,没有实际的电阻存在),按图1-2完成接线,给桥路接入±4V电源(从主控箱引入),同
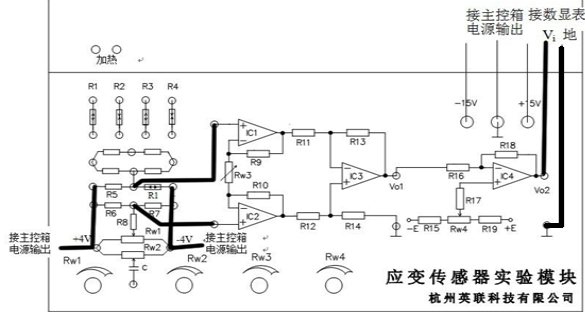
图1-2 应变式传感器单臂电桥实验接线图
时,将模块左上方拨段开关拨至左边“直流”档(直流档和交流档调零电阻阻值不同)。检查接线无误后,合上主控箱电源开关。调节电桥调零电位器Rw1,使电压表显示为零。
备注:
1)、如出现零漂现象,则是应变片在供电电压下,应变片本身通过电流所形成的应变片温度效应的影响,可观察零漂数值的变化,若调零后数值稳定下来,表示应变片已处于工作状态,时间大概5—10分钟。
2)、如出现数值不稳定,电压表读数随机跳变情况,可再次确认各实验线的连接是否牢靠,且保证实验过程中,尽量不接触实验线,另外,由于应变实验增益比较大,实验线陈旧或老化后产生线间电容效应,也会产生此现象。
3)、因应变实验差动放大器放大倍数很高,应变传感器实验模块对各种信号干扰很敏感,所以在用应变模块做实验时模块周围不能放置有无线数据交换的设备,例如正在无线上网的手机、ipad、笔记本等电子设备。
4、测量并记录
在电子秤上放置一只砝码,读取数显表数值,依次增加砝码和读取相应的数显表值,直到10只砝码加完。记下实验结果填入表1-1,关闭电源。
表1-1 单臂电桥输出电压与加负载重量值
重量(g) | 20 | 40 | 60 | 80 | 100 | 120 | 140 | 160 | 180 | 200 |
电压(mv) | 4 | 6 | 8 | 10 | 12 | 13 | 15 | 18 | 21 | 24 |
5、计算灵敏度和误差
根据表1-1计算系统灵敏度S,S=![]() (
(![]() 输出电压变化量;
输出电压变化量;![]() 重量变化量);计算非线性误差:
重量变化量);计算非线性误差:![]() f1=
f1=![]() F •S×100%,式中
F •S×100%,式中![]() 为输出值(多次测量时为平均值)与拟合直线的最大偏差,
为输出值(多次测量时为平均值)与拟合直线的最大偏差,![]() F •S满量程输出平均值,此处为500g或200g。
F •S满量程输出平均值,此处为500g或200g。
非线性误差f=4.168%
五、思考题:
单臂电桥时,作为桥臂电阻应变片应选用:(1)正(受拉)应变片(2)负(受压)应变片(3)正、负应变片均可。
实验二 金属箔式应变片——半桥性能实验
一、实验目的:比较半桥与单臂电桥的不同性能,了解其特点。
二、基本原理:不同受力方向的两片应变片(实验模块上对应变片的受力方向有标识)接入电桥作为邻边,电桥输出灵敏度提高,非线性得到改善。当两片应变片阻值和应变量相同时,其桥路输出电压Uo2=![]() 。
。
三、需要器件与单元:应变式传感器实验模块、砝码、数显表(主控台上电压表)、±15V电源、±4V电源、万用表(自备)。
四、实验步骤:
2、根据图1-3接线。R1、R2为实验模块左上方的应变片,此时要根据模块上的标识确认R1和R2受力状态相反,即将传感器中两片受力相反(一片受拉、一片受压)的电阻应变片作为电桥的相邻边。给桥路接入±4V电源,检查连线无误后,合上主控箱电源,调节电桥调零电位器Rw1进行桥路调零。依次轻放标准砝码,将实验数据记入表1-2,根据表1-2计算灵敏度S=![]() ,非线性误差
,非线性误差![]() f2。
f2。
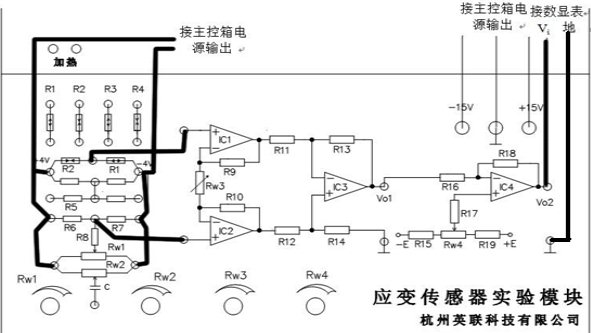
图1-3 应变式传感器半桥实验接线图
表1-2 半桥测量时,输出电压与加负载重量值
重量(g) | 20 | 40 | 60 | 80 | 100 | 120 | 140 | 160 | 180 | 200 |
电压(mv) | 5 | 10 | 16 | 20 | 25 | 32 | 37 | 46 | 51 | 56 |

五、思考题:
桥路(差动电桥)测量时存在非线性误差,是因为:(1)电桥测量原理上存在非线性(2)应变片应变效应是非线性的(3)调零值不是真正为零。
答:(1)
实验三 金属箔式应变片——全桥性能实验
一、实验目的:了解全桥测量电路的优点。
二、基本原理:全桥测量电路中,将受力性质相同的两应变片接入电桥对边,受力方向不同的接入邻边,当应变片初始阻值:R1= R2= R3= R4,其变化值ΔR1=ΔR2=ΔR3=ΔR4时,其桥路输出电压Uo3=![]() 。其输出灵敏度比半桥又提高了一倍,非线性误差和温度误差均得到改善。
。其输出灵敏度比半桥又提高了一倍,非线性误差和温度误差均得到改善。
三、需用器件和单元:应变式传感器实验模块、砝码、数显表(主控台上电压表)、±15V电源、±4V电源、万用表(自备)。
四、实验步骤:
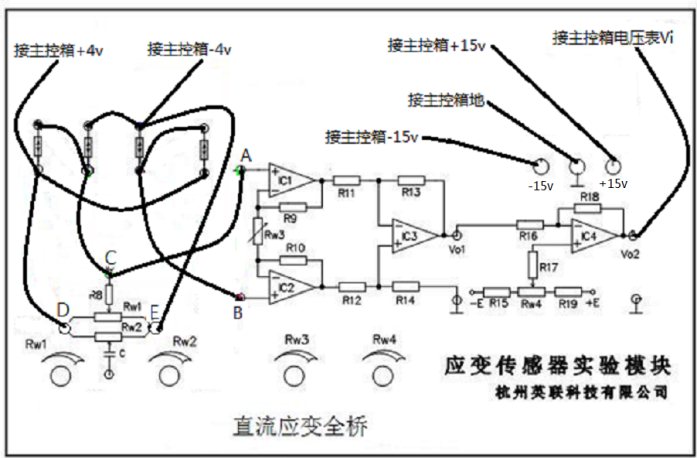
图1-4接线
1、保持单臂、半桥实验中的Rw3和Rw4的当前位置不变。
2、根据图1-4接线,实验方法与半桥实验相同,全桥测量电路中,将受力性质相同的两应变片接入电桥对边,不同的接入邻边,将实验结果填入表1-3;进行灵敏度和非线性误差计算。
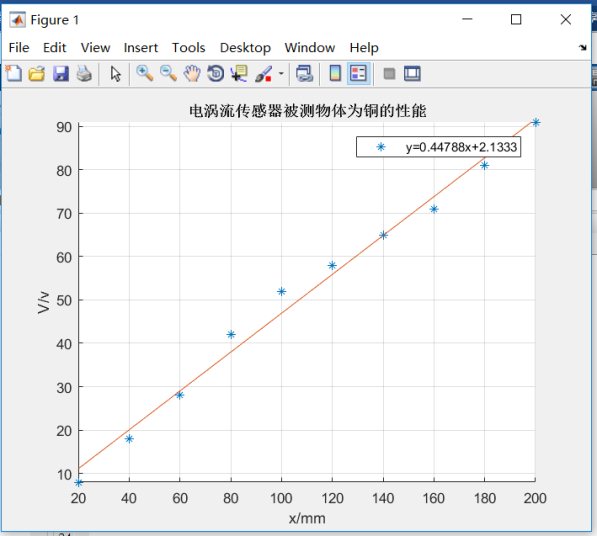
表1-3全桥输出电压与加负载重量值
重量(g) | 20 | 40 | 60 | 80 | 100 | 120 | 140 | 160 | 180 | 200 |
电压(mv) | 8 | 18 | 28 | 42 | 52 | 58 | 65 | 71 | 81 | 91 |
3、根据表1-3计算系统灵敏度S,S=![]() (
(![]() 输出电压变化量;
输出电压变化量;![]() 重量变化量);计算非线性误差:
重量变化量);计算非线性误差:![]() f1=
f1=![]() F •S×100%,式中
F •S×100%,式中![]() 为输出值(多次测量时为平均值)与拟合直线的最大偏差,
为输出值(多次测量时为平均值)与拟合直线的最大偏差,![]() F •S满量程输出平均值。
F •S满量程输出平均值。
传感器的系数灵敏度S=0.448%
非线性误差f=0.604%
实验四 金属箔式应变片单臂、半桥、全桥性能比较
一、实验目的:比较单臂、半桥、全桥输出时的灵敏度和非线性度,得出相应的结论。
二、实验步骤:根据实验一、二、三所得的单臂、半桥和全桥输出时的灵敏度和非线性度,从理论上进行分析比较。阐述理由(注意:实验一、二、三中的放大器增益RW3必须在相同的位置)。
从三个实验对比来看,从单臂到半桥再到全桥,灵敏度依次增大,且大致遵循2倍关系;从理论分析而言,非线性误差全桥电路<半桥电路<单臂电路。但由于实验偶然误差,实测全桥电路非线性误差大于半桥。
实验七 移相器实验
一、实验目的:了解运算放大器构成的移相电路和它的原理及工作情况。
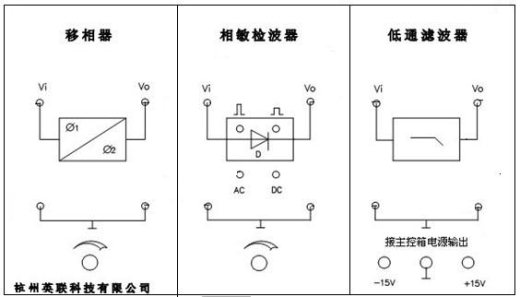
二、基本原理:图5为移相电路示意图,由移相器电路结构图可求得该电路的闭环增益G(s)
![]()
则 ![]()
![]()
当R1=R2=W1= R4=R5=10K时有:
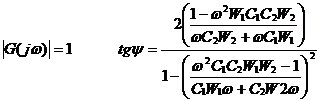 由正切三角函半角公式可得:
由正切三角函半角公式可得:

从上式可以看出,调节电位器W2将产生相应的相位变化。
三、需用器件与单元:移相器/相敏检波器/低通滤波器模块、音频振荡器、双线(双踪)示波器(自备)、直流稳压电源±15V。
四、实验步骤:
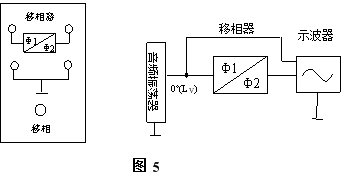 了解移相器原理,即通过调节电位器使交流信号产生相位的变化。
了解移相器原理,即通过调节电位器使交流信号产生相位的变化。2、将音频振荡器的信号引入移相器的输入端(音频信号从0˚、LV插口输出均可),将±15V电源及地线接入移相器模块,合上主控箱电源。
3、将示波器的两根线分别接到移相器的输入和输出端,调整示波器,观察示波器的波形。
4、调节移相器上的电位器,观察两个波形间相位的变化。
5、改变音频振荡器的频率,观察不同频率的最大移相范围。
五、思考题:
1、根据基本原理公式,分析本移相器的工作原理,并解释所观察到的现象。
注意事项:本实验台中音频信号由函数发生器产生,所以通过移相器后波形局部有些畸变,这不是仪器故障。
正确选择示波器中的“触发”形式,以保证双踪示波器能看到波形的变化。
答:根据移相器的电路原理图,改变Rw,改变RC充放时间常数,从而改变信号的相位。


实验八 相敏检波器实验
一、实验目的:了解相敏检波器的原理及工作情况。
二、基本原理:相敏检波器模块示意图如下所示,图中Vi为输入信号端,Vo为输出端,AC为交流参考电压输入端,DC为直流参考电压输入。有脉冲符号的两个端子为附加观察端。
三、需用器件与单元:移相器/相敏检波器/低通滤波器模块、音频振荡器、双踪示波器(自备)、直流稳压电源±15V、±2V、转速/频率表、数显电压表。
四、旋钮初始位置:转速/频率表置频率档,音频振荡器频率为4KHz左右,幅度置最小(逆时针到底),直流稳压电源输出置于±2V档。
五、实验步骤:
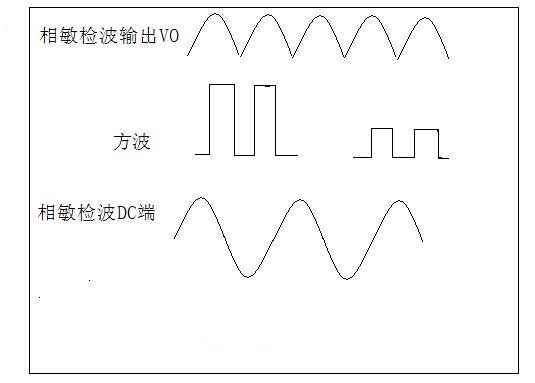
3、将主控台电压选择拨段开关拨至+2V档位,改变参考电压的极性(通过DC端输入+2V或者-2V),观察输入和输出波形的相位和幅值关系。由此可得出结论,当参考电压为正时,输入和输出同相;当参考电压为负时,输入和输出反相。
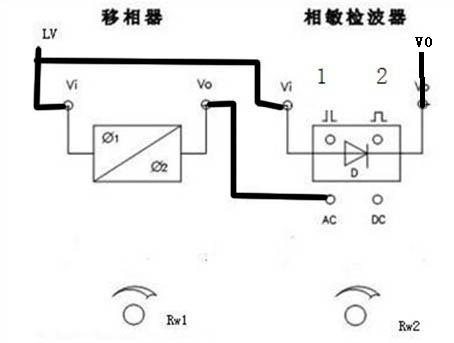
4、调整好示波器,调整音频振荡器的幅度旋钮,示波器输出电压为峰-峰值4V,通过调节移相器和相敏检波器的电位器,使相敏检波器的输出Vo为全波整流波形。
六、思考题:
根据实验结果,可以知道相敏检波器的作用是什么?移相器在实验线路中的作用是什么?(即参考端输入波形相位的作用)。
答:相敏检波器的作用:鉴别调制信号相位和选频作用。
移相器作用:将信号相位移动一个角度。
实验十 差动变压器的性能实验
一、实验目的:了解差动变压器的工作原理和特性。
二、基本原理:差动变压器由一只初级线圈和两只次级线圈及一个铁芯组成(铁芯在可移动杆的一端),根据内外层排列不同,有二段式和三段式,本实验采用三段式结构。当传感器随着被测体移动时,由于初级线圈和次级线圈之间的互感发生变化,促使次级线圈感应电势产生变化,一只次级感应电势增加,另一只感应电势则减少,将两只次级线圈反向串接(同名端连接),就引出差动输出。其输出电势反映出被测体的移动量。
三、需用器件与单元:差动变压器实验模块、测微头、双线示波器、差动变压器、音频信号源(音频振荡器)、直流电源、万用表。
四、实验步骤:

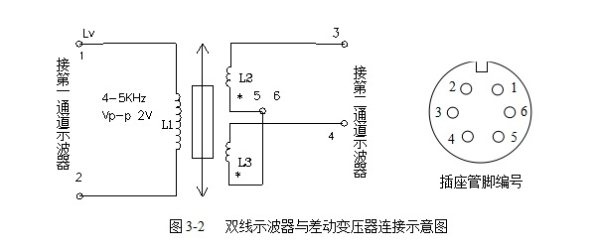
2、在模块上按照图3-2接线,音频振荡器信号必须从主控箱中的LV端子输出,调节音频振荡器的频率,输出频率为5~10KHz(可用主控箱的数显表的频率档fi输入来监测,实验中可调节频率使波形不失真)。调节幅度使输出幅度为峰-峰值Vp-p=2V(可用示波器监测:X轴为0.2ms/div、Y轴CH1为1V/div、CH2为0.2v/div)。判别初次级线圈及次级线圈同名端方法如下:设任一线圈为初级线圈(1和2实验插孔作为初级线圈),并设另外两个线圈的任一端为同名端,按图3-2接线。当铁芯左、右移动时,观察示波器中显示的初级线圈波形,次级线圈波形,当次级波形输出幅值变化很大,基本上能过零点(即3和4实验插孔),而且相位与初级线圈波形(LV音频信号Vp-p=2V波形)比较能同相和反相变化,说明已连接的初、次级线圈及同名端是正确的,否则继续改变连接再判断直到正确为止。图中(1)、(2)、(3)、(4)为模块中的实验插孔。)
3、旋动测微头,使示波器第二通道显示的波形峰-峰值Vp-p为最小。这时可以左右位移,假设其中一个方向为正位移,则另一个方向位移为负。从Vp-p最小开始旋动测微头,每隔0.5mm从示波器上读出输出电压Vp-p值填入表3-1。再从Vp-p最小处反向位移做实验,在实验过程中,注意左、右位移时,初、次级波形的相位关系。
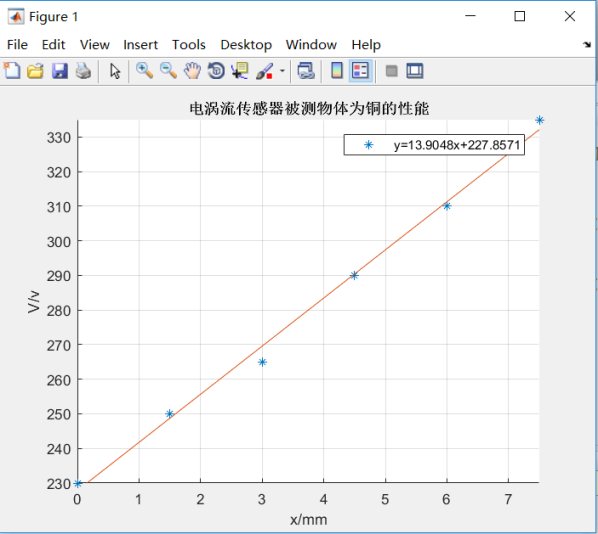
表3-1 差动变压器位移ΔX值与输出电压Vp-p数据表
X(mm) | − ← | 0mm | → + | 1.5 | 3.0 | 4.5 | 6.0 | 7.5 |
V(mv) | Vp-p | 230 |
| 250 | 265 | 290 | 310 | 335 |
4、实验过程中注意差动变压器输出的最小值即为差动变压器的零点残余电压大小。根据表3-1画出Vop-p-X曲线,作出量程为±4mm、±6mm灵敏度和非线性误差。
传感器的系数灵敏度S=13.905%
非线性误差f=-0.628%
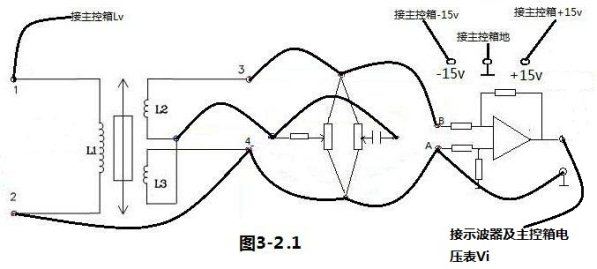
实验十二 差动变压器零点残余电压补偿实验
一、实验目的:了解差动变压器零点残余电压补偿方法。
二、基本原理:由于差动变压器两只次级线圈的等效参数不对称,初级线圈的纵向排列的不均匀性,二次级的不均匀、不一致,铁芯B-H特性的非线性等,因此在铁芯处于差动线圈中间位置时其输出电压并不为零。称其为零点残余电压。
三、需用器件与单元:音频振荡器、测微头、差动变压器、差动变压器实验模块、示波器。
四、实验步骤:
1、按图3-2.1接线,音频信号源从LV插口输出,实验模块R1、C1、Rw1、Rw2为电桥单元中调平衡网络。
2、用示波器调整音频振荡器输出为2V峰-峰值。
3、调整测微头,使差动放大器输出电压最小。
4、依次调整Rw1、Rw2,使输出电压降至最小。
5、观察零点残余电压的波形,注意与激励电压比较。
6、从示波器上观察,差动变压器的零点残余电压值(峰-峰值)。(注:这时的零点残余电压经放大后的零点残余电压=V零点P-P/K,K为放大倍数)
数据:
从示波器上观察到的零点残余电压值为18.6mV
实验十六 直流激励时霍尔式传感器的
位移特性实验
一、实验目的:了解霍尔式传感器原理与应用。
二、基本原理:根据霍尔效应、霍尔电势UH = KHIB,当霍尔元件处在梯度磁场中运动时,它就可以进行位移测量。
三、需用器件与单元:霍尔传感器实验模块、霍尔传感器、直流源±4V、±15V、测微头、数显单元。
四、实验步骤:
1、将霍尔传感器按图5-1安装。霍尔传感器与实验模块的连接按图5-2进行。1、3为电源±4V,2、4为输出。
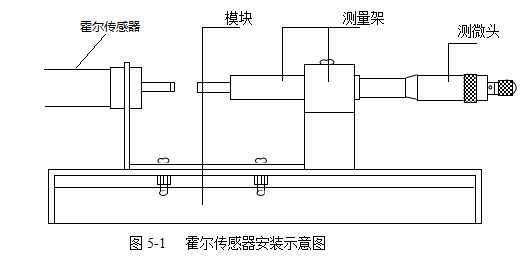
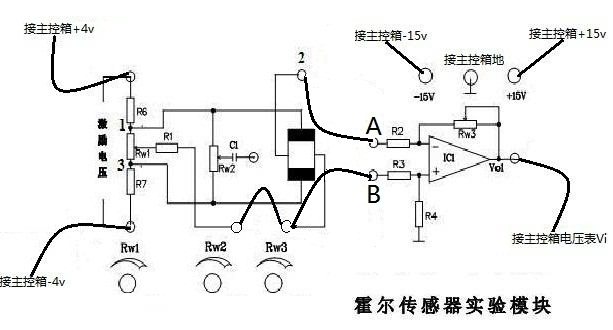
图5-2 霍尔传感器位移直流激励接线图
2、开启电源,调节测微头使霍尔片在磁钢中间位置,再调节Rw1(Rw3处于中间位置)使数显表指示为零。
3、旋转测微头向轴向方向推进,每转动0.2mm记下一个读数,直到读数近似不变,将读数填入表5-1。
表5-1
X(mm) | 0.2 | 0.4 | 0.6 | 0.8 | 1 | 1.2 | 1.4 | 1.6 |
V(mv) | 25.9 | 34.5 | 41.3 | 55.1 | 60.5 | 71.5 | 82.3 | 88.3 |
1.8 | 2.0 | 2.2 | 2.4 | 2.6 | 2.8 | 3.0 | 3.2 | 3.4 |
101.9 | 108.4 | 119.1 | 131.4 | 137.6 | 152.4 | 160.0 | 171.6 | 186.7 |
3.6 | 3.8 | 4.0 | 4.2 | 4.4 | 4.6 | 4.8 | 5.0 | 5.2 |
193.8 | 208 | 218 | 230 | 249 | 260 | 279 | 293 | 309 |
5.4 | 5.6 |
|
|
|
|
|
|
|
331 | 348 |
|
|
|
|
|
|
|
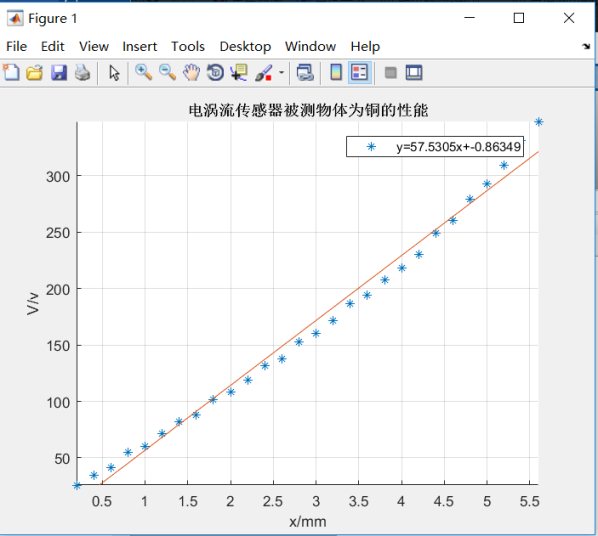
作出V-X曲线,计算不同线性范围时的灵敏度和非线性误差。
传感器的系数灵敏度S=57.531%
非线性误差f=0.493%
五、思考题:
本实验中霍尔元件位移的线性度实际上反映的是什么量的变化?
答:是实际的输入输出与拟合的理想的直线的偏离程度的变化,当X不同的时候,实际的输出值与根据拟合直线得到的数值的偏离值是不相同的。
实验十七 交流激励时霍尔式传感器的
位移特性实验
一、实验目的:了解交流激励时霍尔片的特性
二、基本原理:交流激励时霍尔元件与直流激励一样,基本工作原理相同,不同之处是测量电路。
三、需用器件与单元:在“直流霍尔传感器位移特性”基础上加移相/相敏检波/低通滤波模块、双线示波器。
四、实验步骤:
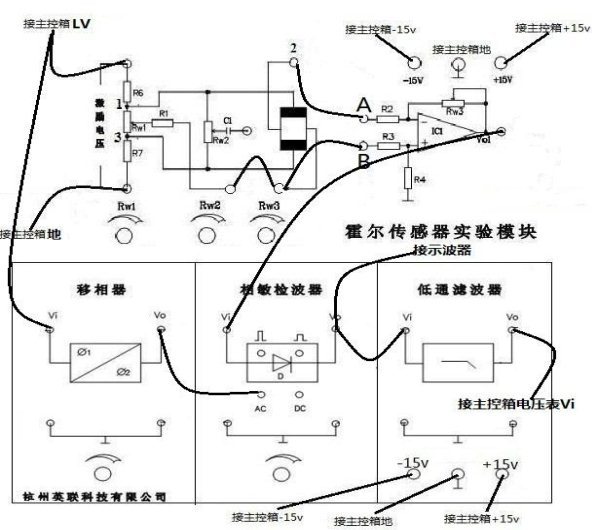
2、调节音频振荡器频率和幅度旋钮,从LV输出用示波器测量,使输出为1KHz、峰-峰值为4V,引入电路中(激励电压从音频输出端Lv输出频率1KHz,幅值为4V峰-峰值,注意频率过大会烧坏霍尔元件)。
3、调节测微头使霍尔传感器产生一个较大的位移(此时Rw3顺时针旋转至最大位置),利用示波器观察相敏检波器输出(此时示波器档位时间轴为0.2ms,电压轴为0.2V),旋转移相单元电位器Rw和相敏检波电位器Rw,使示波器显示全波整流波形。此时固定移相单元电位器Rw和相敏检波电位器Rw,保持电位器位置不变。
4、调节测微头使霍尔传感器处于传感器中间位移部分,先用示波器观察使霍尔元件不等位电势为最小(即相敏检波输出接近一条直线)。
5、然后从电压数显表上观察,调节电位器Rw1、Rw2使显示为零,然后旋动测微头,记下每转动0.2mm时表头读数,填入表5-2。
表5-2 交流激励时输出电压和位移数据
X(mm) | 0.2 | 0.4 | 0.6 | 0.8 | 1.0 | 1.2 | 1.4 | 1.6 |
V(mv) | -726 | -646 | -565 | -484 | -410 | -328 | -252 | -173 |
1.8 | 2.0 | 2.2 | 2.4 | 2.6 | 2.8 | 3.0 | 3.2 | 3.4 |
-98 | -21 | 56 | 135 | 218 | 294 | 374 | 458 | 545 |
3.6 | 3.8 | 4.0 |
|
|
|
|
|
|
616 | 687 | 753 |
|
|
|
|
|
|
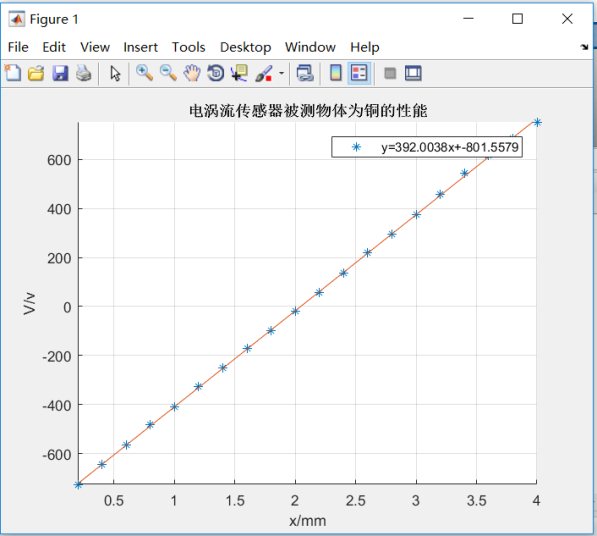
6、根据表5-2作出V-X曲线,计算不同量程时的非线性误差。
传感器的系数灵敏度S=392.004%
非线性误差f=0.754%
实验十八 霍尔测速实验*
一、实验目的:了解霍尔转速传感器的应用。
二、基本原理:利用霍尔效应表达式UH = KHIB,当被测圆盘上装上N只磁性体时,圆盘每转一周,磁场就变化N次,霍尔电势相应变化N次,输出电势通过放大、整形和计数电路就可以测量被测旋转物的转速(转速=60*频率/12)
三、需用器件与单元:霍尔转速传感器、转速调节2-24V、转动源单元、数显单元的转速显示部分。
四、实验步骤:

1、根据图5-4,将霍尔转速传感器装于传感器支架上,探头对准反射面的磁钢。
2、将直流源加于霍尔元件电源输入端。红(+)接+5V,黑(┴)接地。
3、将霍尔转速传感器输出端(蓝)插入数显单元Fi端。
4、将转速调节中的2-24V转速电源引到转动源的2-24V插孔。
5、将数显单元上的转速/频率表波段开关拨到转速档,此时数显表指示转速。
6、调节电压使转动速度变化。观察数显表转速显示的变化。
电压(V) | 4 | 5 | 8 | 10 | 15 | 20 |
转速(转/分) | 0 | 544 | 930 | 1245 | 1810 | 2264 |
由以上数据可得:电压的值越大,电机的转速就越快。
五、思考题:
1、利用霍尔元件测转速,在测量上是否有限制?
答:有,测量速度不能过慢,因为磁感应强度发生变化的周期过长,大于读取脉冲信号的电路的工作周期,就会导致计数错误
2、本实验装置上用了十二只磁钢,能否用一只磁钢,二者有什么区别呢?
答:如果霍尔是单极的,可以只用一只磁钢,但可靠性和精度会差一点;如果霍尔是双极的,那么必须要有一组分别为n/s极的磁钢去开启关断它,那么至少要两只磁钢。
实验二十一 电涡流传感器位移特性实验
一、实验目的:了解电涡流传感器测量位移的工作原理和特性。
二、基本原理:通以高频电流的线圈产生磁场,当有导电体接近时,因导电体涡流效应产生涡流损耗,而涡流损耗与导电体离线圈的距离有关,因此可以进行位移测量。
三、需用器件与单元:电涡流传感器实验模块、电涡流传感器、直流电源、数显单元(主控台电压表)、测微头、铁圆片。
四、实验步骤:
1、根据图8-1安装电涡流传感器。
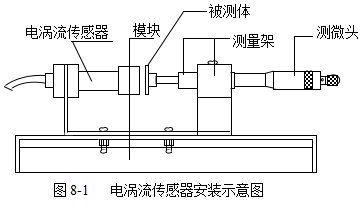
2、观察传感器结构,这是一个扁平绕线圈。
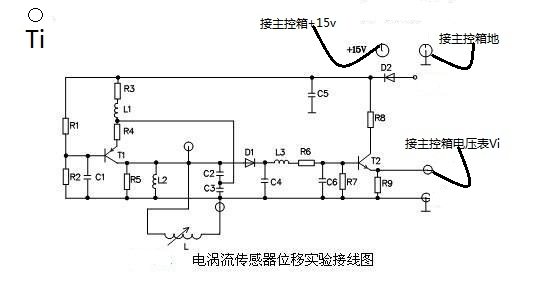
3、将电涡流传感器输出线接入模块上标有Ti的插孔中,作为振荡器的一个原件。
4、在测微头端部装上铁质金属圆片,作为电涡流传感器的被测体。
5、将实验模块输出端Vo与数显单元输入端Vi相接。数显表量程切换开关选择电压20V档。
6、用连接导线从主控台接入+15V直流电源到模块上标有+15V的插孔中,同时主控台的“地”与实验模块的“地”相连。
7、使测微头与传感器线圈端部有机玻璃平面接触,开启主控箱电源开关(数显表读数能调到零的使接触时数显表读数为零且刚要开始变化),记下数显表读数,然后每隔0.2mm(或0.5mm)读一个数,直到输出几乎不变为止。将结果列入表8-1。
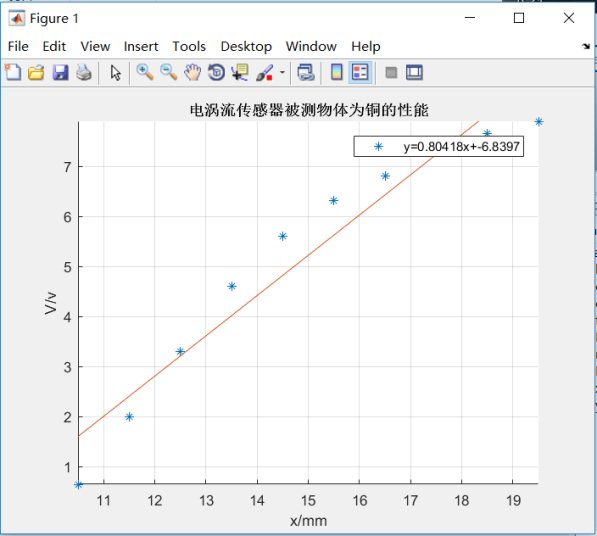
表8-1 电涡流传感器位移X与输出电压数据
X(mm) | 10.5 | 11.5 | 12.5 | 13.5 | 14.5 | 15.5 | 16.5 | 17.5 | 18.5 | 19.5 |
V(v) | 0.65 | 2.00 | 3.30 | 4.60 | 5.60 | 6.32 | 6.80 | 7.40 | 7.66 | 7.9 |
8、根据表8-1数据,画出V-X曲线,根据曲线找出线性区域及进行正、负位移测量时的最佳工作点,试计算量程为1mm、3mm、5mm时的灵敏度和线性度(可以用端基法或其它拟合直线)。
传感器的系数灵敏度S=0.804%
非线性误差f=0.340%
五、思考题:
1、电涡流传感器的量程与哪些因素有关,如果需要测量±5mm的量程应如何设计传感器?
答:金属导体的电阻率,厚度,线圈的励磁电流角频率以及线圈与金属块之间的距离
答:可以通过贴金属片等方式进行测量
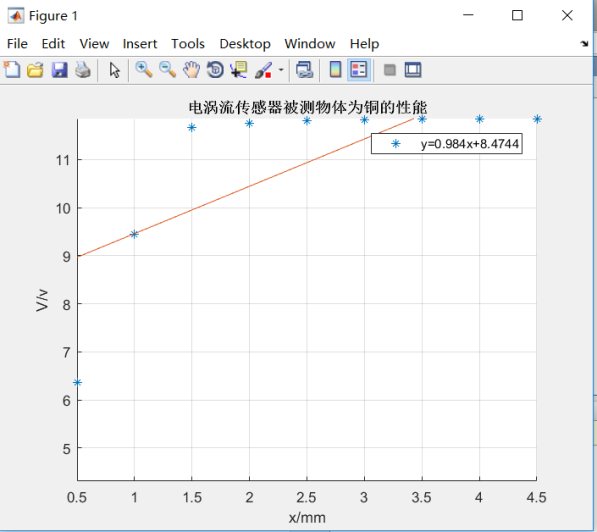
实验二十二 被测体材质对电涡流传感器的
特性影响实验
一、实验目的:了解不同的被测体材料对电涡流传感器性能的影响。
二、基本原理:涡流效应与金属导体本身的电阻率和磁导率有关,因此不同的材料就会有不同的性能。
三、需用器件与单元:除与“电涡流位移特性实验”相同外,另加铜和铝的被测体小圆片。
四、实验步骤:
1、传感器安装同“电涡流位移特性实验”传感器的安装。
2、将原铁圆片换成铝和铜圆片。
3、重复“电涡流位移特性实验”步骤,进行被测体为铝圆片和铜圆片时的位移特性测试,分别记入表8-2和表8-3。
表8-2 被测体为铝圆片时的位移与输出电压数据
X(mm) | 0.5 | 1.0 | 1.5 | 2.0 | 2.5 | 3.0 | 3.5 | 4.0 |
V(v) | 0.44 | 0.96 | 1.55 | 2.14 | 2.80 | 4.21 | 5.32 | 6.52 |
4.5 | 5.0 | 5.5 | 6.0 | 6.5 | 7.0 | 7.5 | 8.0 | 8.5 |
7.42 | 8.28 | 9.19 | 10.03 | 10.69 | 11.20 | 11.61 | 11.69 | 11.72 |
9.0 | 9.5 |
|
|
|
|
|
|
|
11.73 | 11.74 |
|
|
|
|
|
|
|
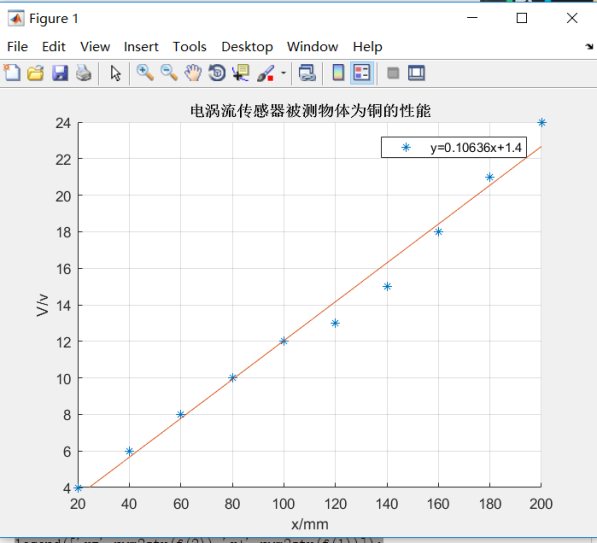
表8-3 被测体为铜圆片时的位移与输出电压数据
X(mm) | 0.5 | 1.0 | 1.5 | 2.0 | 2.5 | 3.0 | 3.5 | 4.0 |
V(v) | 2.38 | 4.07 | 6.03 | 8.38 | 11.02 | 11.73 | 11.78 | 11.81 |
4.5 | 5.0 | 5.5 | 6.0 |
|
|
|
|
|
11.83 | 11.84 | 11.86 | 11.86 |
|
|
|
|
|
4、根据表8-2和表8-3分别计算量程为1mm和3mm时的灵敏度和非线性误差(线性度)。

传感器的系数灵敏度S=1.641%
非线性误差f=-0.019%

5、比较实验二十三和本实验所得的结果,并进行小结。
传感器的特性是和物体的电导率和磁导率有关的,由于被测物体的灵敏度铁>铜>铝,故而可以得到磁导率越低的材料,传感器的灵敏度越高。
实验二十三 被测体面积大小对电涡流传感器的
特性影响实验
一、实验目的:了解电涡流传感器在实际应用中其位移特性与被测体的形状和尺寸有关。
二、基本原理:电涡流传感器在实际应用中,由于被测体的形状、大小不同会导致被测体上涡流效应的不充分,会减弱甚至不产生涡流效应,因此影响电涡流传感器的静态特性,所以在实际测量中,往往必须针对具体的被测体进行静态特性标定。
三、需用器件与单元:直流源、电涡流传感器、测微头、电涡流传感器实验模块、不同面积的铝被测体、数显单元。
四、实验步骤:
1、传感器安装与前面静态特性实验相同。
2、按照测静态特性实验要求连接好测量线路。
3、在测微头上分别用两种不同的被测铝(小圆片、小圆柱体)进行电涡流位移特性测定,分别记入表8-5。。
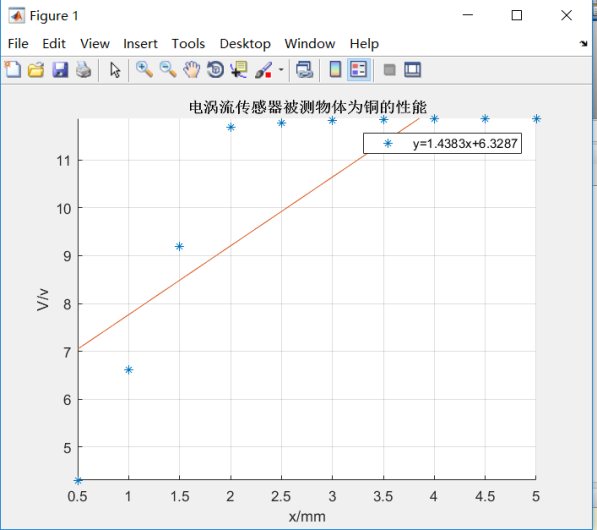
表8-5 不同尺寸时的被测体特性数据
X(mm) | 0.5 | 1.0 | 1.5 | 2.0 | 2.5 | 3.0 | 3.5 | 4.0 |
铝片 | 4.31 | 6.62 | 9.19 | 11.68 | 11.78 | 11.82 | 11.84 | 11.86 |
铝柱 | 6.37 | 9.45 | 11.67 | 11.76 | 11.80 | 11.82 | 11.84 | 11.85 |
4.5 | 5.0 |
|
|
|
|
|
|
|
11.87 | 11.87 |
|
|
|
|
|
|
|
11.85 |
|
|
|
|
|
|
|
|
4、根据表8-5数据计算目前范围内两种被测体:被测体1、2的灵敏度,并说明理由。
铝片:
传感器的系数灵敏度S=1.438%
非线性误差f=-0.288%
铝柱:
传感器的系数灵敏度S=0.984%
非线性误差f=-0.949%
通过实验可知,由于探头线圈产生的磁场范围是一定的,当被测物体为圆柱且探头中心线与轴心线正交时,被测轴直径小会导致传感器的灵敏度下降,被测体表面越小,灵敏感下降越多。所以铝片的灵敏度大于铝柱的灵敏度。
完整的Word格式文档51黑下载地址:
 实验指导书-简化版.doc
(12.62 MB, 下载次数: 32)
实验指导书-简化版.doc
(12.62 MB, 下载次数: 32)
| 欢迎光临 (http://www.51hei.com/bbs/) | Powered by Discuz! X3.1 |