标题: 51单片机智能车超声波避障实验 [打印本页]
作者: LIT 时间: 2018-11-16 20:02
标题: 51单片机智能车超声波避障实验
51单片机平台-------超声波避障实验
图1-1 51单片机主控板
图1-2 一体云台超声波模块
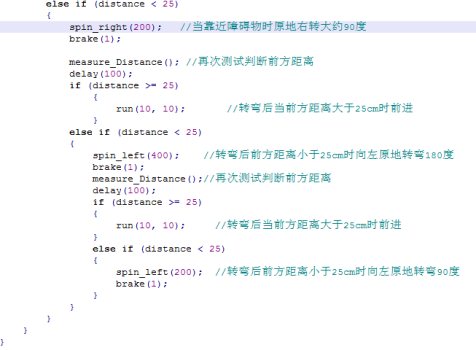
单片机上电之后,启动超声波避障功能,当前方有障碍物时小车则相应的转向避障。
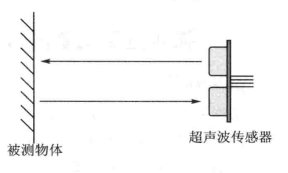
SR04是利用超声波特性检测距离的传感器。其带有两个超声波探头,分别用作发射和接收超声波。其测量的范围是3-500cm。
图3-1 超声波发射和接收示意图
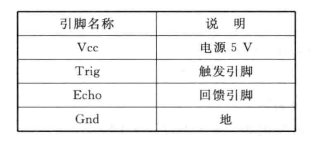
图3-2 SR04超声波模块引脚
该模块的工作原理:
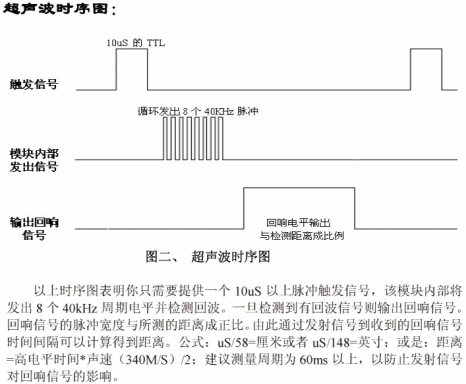
先使用单片机的P3.7引脚向TRIG脚输入至少10us的高电平信号,触发模块的测距功能。如下图3-3所示:
图3-3 STM32发送触发信号
测距功能触发后,模块将自动发出 8 个 40kHz 的超声波脉冲,并自动检测是否有信号返回,这一步由模块内部自动完成。
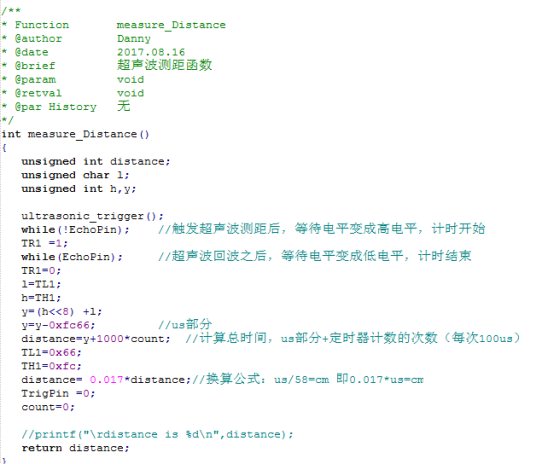
一旦检测到有回波信号则ECHO引脚会输出高电平。高电平持续的时间就是超声波从发射到返回的时间。此时可以使用定时器获取高电平的时间, 并计算出距被测物体的实际距离。公式: 距离=高电平时间*声速(340M/S)/2。
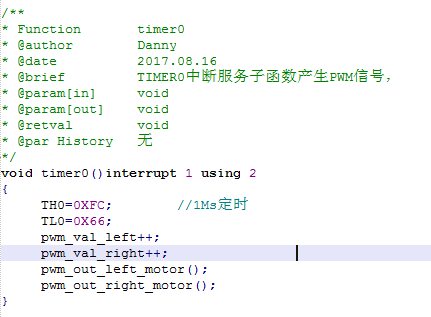
另外有关于PWM的原理以及定时器的理论知识请见实验二以及实验三。
4、实验步骤
4-1.看懂原理图
图4-1 单片机主控板电路图
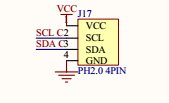
图4-2 超声波接线头
4-2 理解原理图
由电路原理图可知超声波的Trig引脚接在接在主控板上的RD(SCL_C)上,而Echo接在主控板上的WR(SDA_C)上。
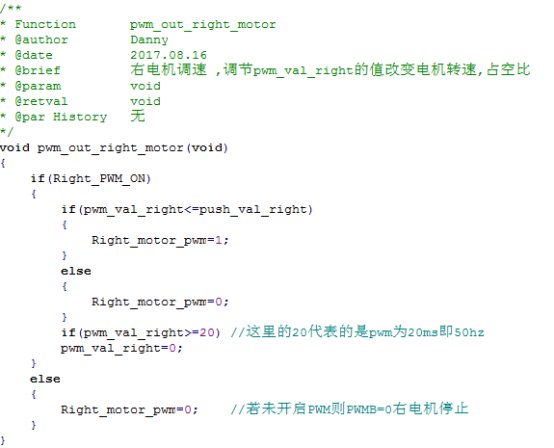
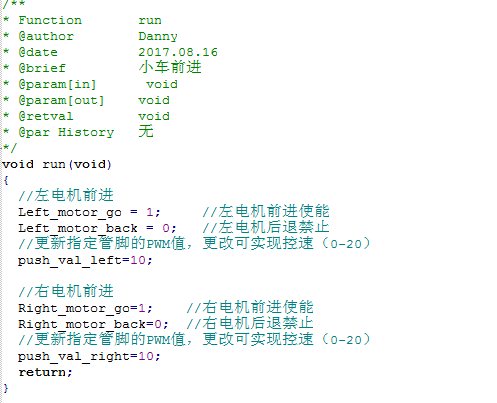
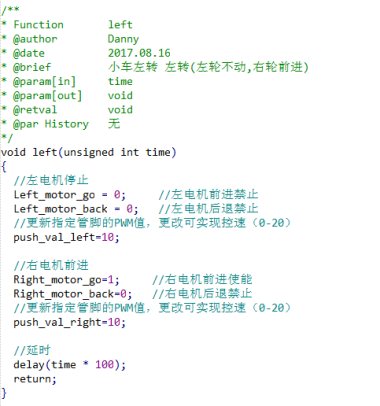
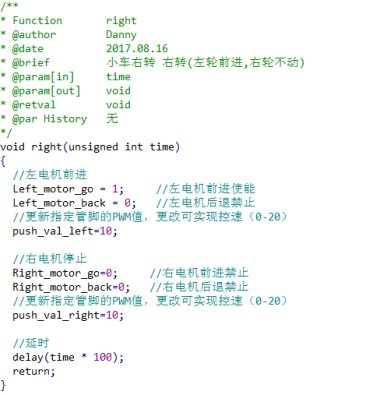
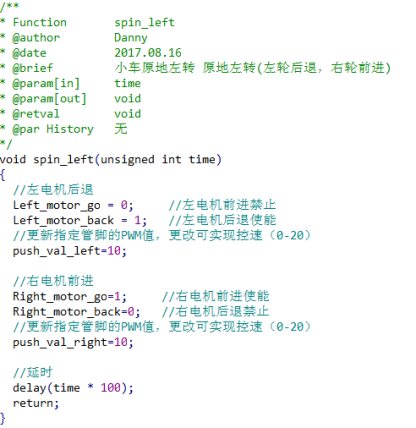
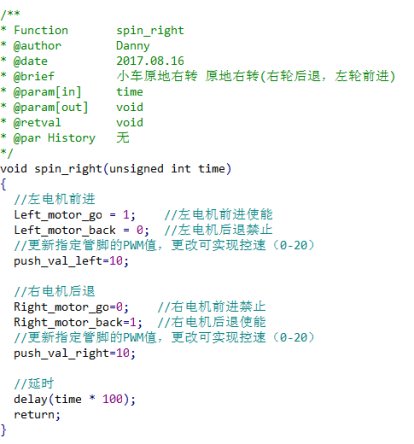
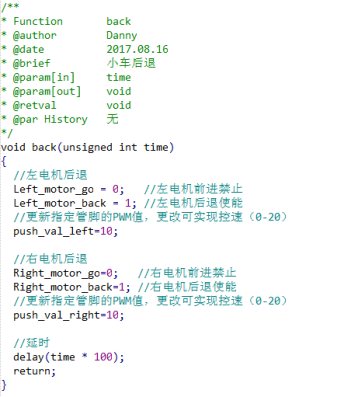
4-3.程序核心代码如下:
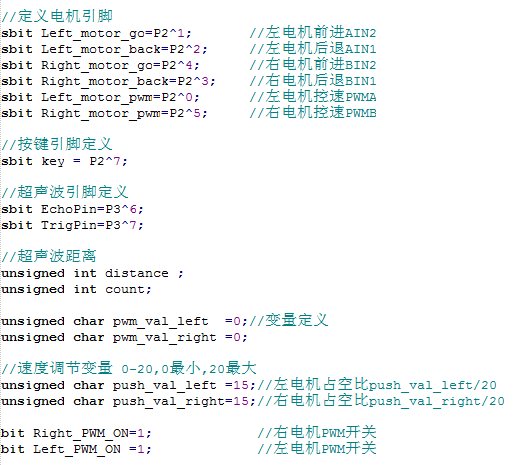
1.基本变量以及引脚的定义:
5.超声波测距函数:
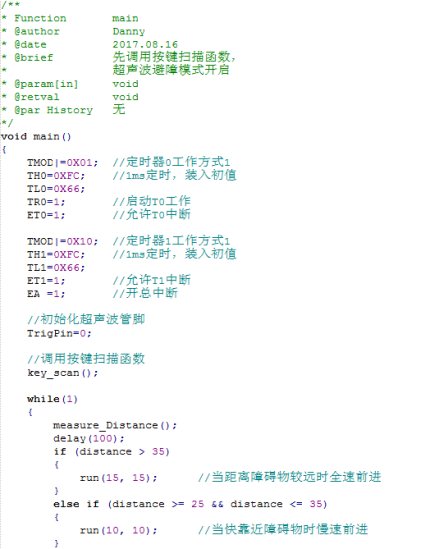
6.主函数
作者: ptlantu 时间: 2018-11-17 09:17
学习学习
作者: 一寸灰 时间: 2019-4-25 14:02
程序似乎不对,另个地方都没有定义,有点看不懂,求教?
作者: 一寸灰 时间: 2019-4-25 14:41
那个调用的ultrasonic_trigger();是什么?还有那个按键扫描是干啥的额
作者: 123lhz 时间: 2019-10-9 08:59
代码少东西了
作者: leezll 时间: 2019-10-22 00:52
到底好不好啊!@好多都是不稳定得程序
作者: xybeyourself 时间: 2019-10-23 20:20
厉害了,这么多函数调用,很明了,待实验验证。
| 欢迎光临 (http://www.51hei.com/bbs/) |
Powered by Discuz! X3.1 |