由上述分析可得,增大 KI,速度的调节时间减少,超调量增加。通过多次数据比对,我们最后取得的电机 PI 参数为 KP=12,KI=0.7。
4.3 整车联调测试及结果
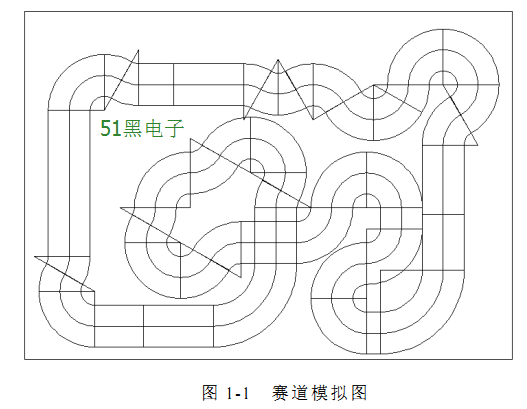
测试赛道如图 4-10 所示,该赛道具有元素多、难度大等特点。为了便于分析,将本赛道分解为几个部分,分别是小 S 部分、大 S 部分、太极弯部分、直道入急弯部分、坡道部分、大回环部分。下面针对各部分进行赛道分析及展示调试结果。为了便于描述,下文中使用了弱化转向、中等转向、 强化转向等术语,其含义是对算法得出的控制量乘以一定的系数。弱化转向乘以小于 1 的系数,具体大小与控制量相关;中等转向不改变控制输出量;强化转向乘以大于 1 的系数,具体大小与控制量相关。
1. 小 S 部分
小 S 道的偏移量相对较小,但是赛道曲率中心在不断改变,需要频繁换向,这对于前瞻不大、信息量不足的电磁小车来说,如果没有一个很好的控制方案,小车在该赛道 中就会剧烈抖动,速度快的话就会跑出赛道。 本文提出的基于赛道曲率的“阿克曼转向”控制方案与原始的基于位置偏差的控制方案不同,它可以实时预测到赛道的曲率及曲率中心的变化。当赛道的曲率较大且 曲率中心频繁变换时,我们便可以知道小车正处于小S 道。此时我们便使用转向弱化、中速前进的控制方案。小车在小 S 道的运动轨迹示意图如图 4-11 所示。
2. 大 S 部分
大 S 的偏移量相对较大,但是赛道的曲率中心不频繁改变。在大 S 道中的转向控制较为简单,但是速度控制是一个难点。如何在大 S 道中实现弯道切换时减速,在弯道中加速,是提高竞赛成绩的一个关键点。 本文提出的基于赛道曲率的控制方案可以很好得解决上述问题。当赛道曲率不断改变、曲率中心只出现一次改变时,我们就可以认为是进入了弯道切换状态,此时便 采用加强转向、低速前进的控制方案;当赛道曲率较大,曲率中心不变时,我们就可以认为是进入弯道状态,此时采用中等转向、中高速前进的控制方案。小车在大 S 道中的运动轨迹示意图如图 4-12所示。
3. 太极弯部分
太极弯部分的赛道间距较小,容易发生串扰现象;太极弯部分对小车的转向性能要求很高,给予的调整空间较小。 本文提出的基于三次多项式拟合的位置解算算法鲁棒性很高,可以克服各种干扰的影响,显然临近导线段对传感器的干扰也可以大致消除。事实上,我们可以把太极 弯当做一个对转向性能要求更高的大 S 道。因此,我们采用了强化转向,低速前进的控制方案。小车在太极弯部分的运动轨迹示意图如图 4-13 所示。
 飞思卡尔技术报告.pdf
(3.04 MB, 下载次数: 542)
飞思卡尔技术报告.pdf
(3.04 MB, 下载次数: 542)