 SG90舵机--自动控制.7z
(8.99 KB, 下载次数: 1154)
SG90舵机--自动控制.7z
(8.99 KB, 下载次数: 1154)
| 中断号 | 中断源 |
| 0 | 外部中断0 |
| 1 | 定时器中断0 |
| 2 | 外部中断1 |
| 3 | 定时器中断1 |
| 4 | 串行口中断1 |
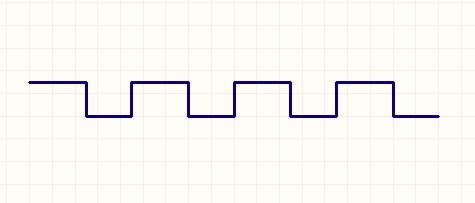

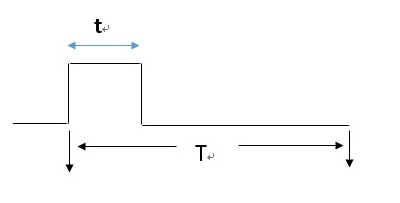
| 高电平t占整个周期T(20ms)的时间 | 舵机旋转的角度 |
| 0.5ms | 0度 |
| 1ms | 45度 |
| 1.5ms | 90度 |
| 2ms | 135度 |
| 2.5ms | 180度 |
 SG90舵机--自动控制.7z
(8.99 KB, 下载次数: 1154)
SG90舵机--按键控制.7z
(9.62 KB, 下载次数: 928)
SG90舵机--自动控制.7z
(8.99 KB, 下载次数: 1154)
SG90舵机--按键控制.7z
(9.62 KB, 下载次数: 928)
 浅谈SG90舵机.docx
(139.68 KB, 下载次数: 464)
浅谈SG90舵机.docx
(139.68 KB, 下载次数: 464)
我只是过于低调 发表于 2019-4-17 21:10
已经发送到你的邮箱
Rainson 发表于 2019-4-20 01:38
请问自动控制使用什么控制的?
阿鎏尼克 发表于 2019-4-20 10:10
谢谢392389854@qq.com
safadsgsgf 发表于 2019-4-24 23:53
感谢楼主分享!
kkk11 发表于 2019-4-29 09:08
请问转180°应该怎么设置??
bazhahei 发表于 2019-5-1 09:38
2622869349@qq.com 谢谢楼主
机械1111 发表于 2019-5-2 23:20
楼主,要控制多个舵机应该怎么办?我这样改的程序但是这几个舵机转的角度都不一样,有的转角特别小
if(co ...
我只是过于低调 发表于 2019-5-3 14:12
你是想要所有的舵机转一样的角度嘛?
机械1111 发表于 2019-5-4 07:16
是的,我想让它们同步地转一样的角度
机械1111 发表于 2019-5-4 09:28
实际上我想做一个四足机器人,让它们都同步转一样的角度只是先测试一下,最终想实现的是前两个舵机同步前 ...
我只是过于低调 发表于 2019-4-29 09:23
高电平t占有周期的时间改为2.5ms,理论上可以转到180°,但是不知道什么原因,我得舵机不能完全转到180° ...
ZimmerHo 发表于 2019-5-10 16:20
1135749091@qq.com谢谢楼主了啊 有急用
ZimmerHo 发表于 2019-5-10 21:52
1135749091@qq.com求发
gyh123gyh 发表于 2019-5-11 06:43
1297714938@qq.com 谢谢楼主
初心22 发表于 2019-5-12 19:33
1652493957@qq.com 谢谢!
落枫。念流月 发表于 2019-5-15 00:02
非常非常感谢
mhtzjl 发表于 2019-5-15 18:02
1420633563@qq.com非常感谢,有急用
落枫。念流月 发表于 2019-5-15 00:02
非常非常感谢
mhtzjl 发表于 2019-5-15 18:02
1420633563@qq.com非常感谢,有急用
a751123973 发表于 2019-5-17 19:40
楼主你好,我的舵机是数字舵机,我按照您的代码,在中断的count > 40 的判断里加了一句 TR0 = 0以中断计时 ...
小笨鸟O 发表于 2019-5-22 20:46
我下午跟的帖子,为什么看不到呢?
我只是过于低调 发表于 2019-5-19 10:10
第一,有没有将中断后面的TR0=1注释掉
第二,这个数字舵机的驱动方式是否和这个模拟舵机一样
我只是过于低调 发表于 2019-5-19 10:10
第一,有没有将中断后面的TR0=1注释掉
第二,这个数字舵机的驱动方式是否和这个模拟舵机一样
a751123973 发表于 2019-5-23 12:31
不好意思打扰了,已经解决了,谢谢。是我的共地没有接好

a18611503728 发表于 2019-5-24 02:17
请问,您有这个型号舵机的原理图吗?
小笨鸟O 发表于 2019-5-23 21:24
遇到一个奇怪的事:sbit PM=P0^1,然后和P0^0取反,编译没有错误和警告。但是P0^1的舵机不动,用示波器看一 ...
无回无悔 发表于 2019-5-24 10:53
928936978@qq.com
我只是过于低调 发表于 2019-5-24 09:30
看看定时器是否配置正确,示波器也就做实验用过,我也不太懂!你们条件真好
IMG_20190524_152615.jpg (1.14 MB, 下载次数: 1250)

IMG_20190524_152729.jpg (1.57 MB, 下载次数: 1216)
小笨鸟O 发表于 2019-5-24 18:36
我的示波器是玩具型的,80元左右(附图),看I/O简单的信号方便,缺点是会卡。P0^0取反有信号,只是t是低电 ...
我只是过于低调 发表于 2019-5-25 14:33
不得不承认,你比我玩的好,我还是小菜鸡一个呢
小笨鸟O 发表于 2019-5-25 20:33
您太过谦啦!如果有笨笨比赛的话,我保证能拿金牌,比如高考英文最高一次是11分,所以学编程很难,学了十 ...

我只是过于低调 发表于 2019-5-26 11:27
其实给你些建议吧:
1.英语和编程是两回事,如果真的说他俩有点关系的话,那可能就是芯片手册了吧
2.这 ...
小笨鸟O 发表于 2019-5-27 16:30
听您的建议,我把定时器有关的视频教程又看了好几遍,还是许多不懂。
说实话,我的这样智商,学习十几年 ...
李大意儿 发表于 2019-5-28 11:05
非常感谢楼主!
最近刚好在使用SG90舵机做无碳小车转弯模块,但是目前调试出来的结果是舵机一直在朝一个方 ...
李大意儿 发表于 2019-5-28 11:05
非常感谢楼主!
最近刚好在使用SG90舵机做无碳小车转弯模块,但是目前调试出来的结果是舵机一直在朝一个方 ...
小笨鸟O 发表于 2019-5-24 18:36
我的示波器是玩具型的,80元左右(附图),看I/O简单的信号方便,缺点是会卡。P0^0取反有信号,只是t是低电 ...
我只是过于低调 发表于 2019-5-28 17:13
加我QQ,782977902,记得备注
rtc900 发表于 2019-5-30 09:51
这个应该有用,航模的油门的控制是不是用的这种pwm的方式呢、?
我只是过于低调 发表于 2019-5-26 11:27
其实给你些建议吧:
1.英语和编程是两回事,如果真的说他俩有点关系的话,那可能就是芯片手册了吧
2.这 ...
| 欢迎光临 (http://www.51hei.com/bbs/) | Powered by Discuz! X3.1 |

