标题:
STM32小车四路pwm源程序,可寻迹,oled显示,可pid调节
[打印本页]
作者:
a15511302978
时间:
2019-7-19 15:11
标题:
STM32小车四路pwm源程序,可寻迹,oled显示,可pid调节
这个c8t6小车是我参加电赛的时候做的,目前具有红外寻迹,oled实时显示时间,蓝牙通信,在手机端上显示小车运动时间,还有加入了mpu6050模块和pid算法,实现了小车在跷跷板上的平衡。小车的照片和原理图都放在附件里了,大家可以看一看。
制作出来的实物图如下:
2.jpg
(89.43 KB, 下载次数: 59)
下载附件
2019-7-19 18:50 上传
1.png
(98.31 KB, 下载次数: 81)
下载附件
2019-7-19 18:50 上传
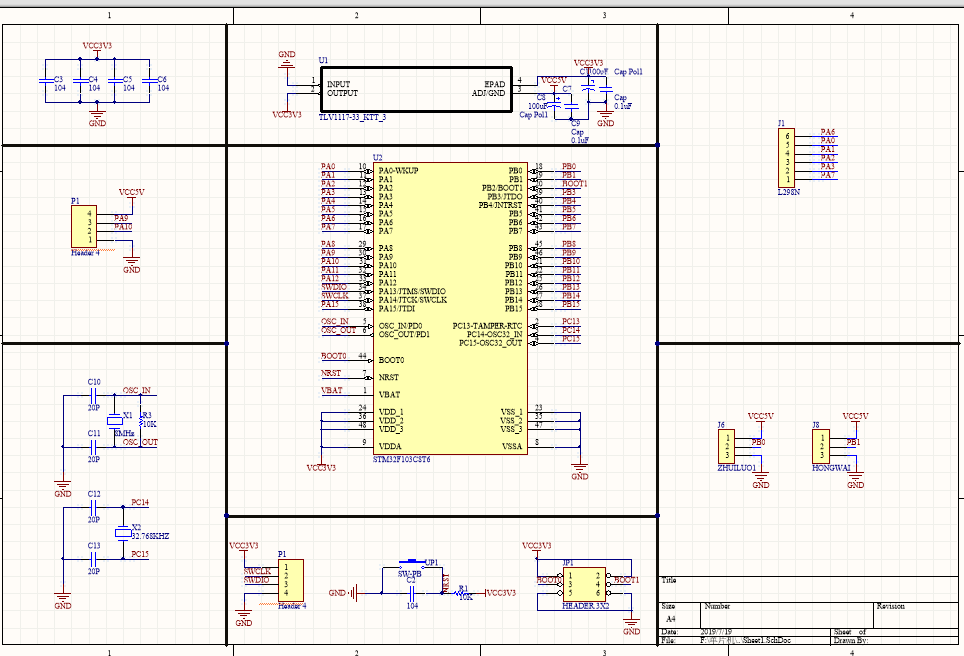
电路原理图如下:
/**
* @par Copyright (C): 2010-2019, Shenzhen Yahboom Tech
* @file app_motor.c
* @author liusen
* @version V1.0
* @brief 小车运动控制函数
* @details
* @par History 见如下说明
*
* version: liusen_20170717
*/
#include "app_motor.h"
#include "sys.h"
#include "bsp_motor.h"
#define LeftMotor_Go() {GPIO_SetBits(Motor_Port, Left_MotoA_Pin); GPIO_ResetBits(Motor_Port, Left_MotoB_Pin);GPIO_SetBits(Motor_Port1, Left_MotoA1_Pin); GPIO_ResetBits(Motor_Port1, Left_MotoB1_Pin);}//反转
#define LeftMotor_Back() {GPIO_ResetBits(Motor_Port, Left_MotoA_Pin); GPIO_SetBits(Motor_Port, Left_MotoB_Pin);GPIO_ResetBits(Motor_Port1, Left_MotoA1_Pin); GPIO_SetBits(Motor_Port1, Left_MotoB1_Pin);}//正转
#define LeftMotor_Stop() {GPIO_ResetBits(Motor_Port, Left_MotoA_Pin); GPIO_ResetBits(Motor_Port, Left_MotoB_Pin);GPIO_ResetBits(Motor_Port1, Left_MotoA1_Pin); GPIO_ResetBits(Motor_Port1, Left_MotoB1_Pin);}//停止
#define RightMotor_Go() {GPIO_SetBits(Motor_Port, Right_MotoA_Pin); GPIO_ResetBits(Motor_Port, Right_MotoB_Pin);GPIO_SetBits(Motor_Port, Right_MotoA1_Pin); GPIO_ResetBits(Motor_Port, Right_MotoB1_Pin);}//反转
#define RightMotor_Back() {GPIO_ResetBits(Motor_Port, Right_MotoA_Pin); GPIO_SetBits(Motor_Port, Right_MotoB_Pin);GPIO_ResetBits(Motor_Port, Right_MotoA1_Pin); GPIO_SetBits(Motor_Port, Right_MotoB1_Pin);}//正转
#define RightMotor_Stop() {GPIO_ResetBits(Motor_Port, Right_MotoA_Pin); GPIO_ResetBits(Motor_Port, Right_MotoB_Pin);GPIO_ResetBits(Motor_Port, Right_MotoA1_Pin); GPIO_ResetBits(Motor_Port, Right_MotoB1_Pin);}//停止
#define LeftMotorPWM(Speed) TIM_SetCompare2(TIM4, Speed); //左前
#define RightMotorPWM(Speed) TIM_SetCompare1(TIM4, Speed); //右前
#define Left1MotorPWM(Speed) TIM_SetCompare3(TIM4, Speed); //左后
#define Right1MotorPWM(Speed) TIM_SetCompare4(TIM4, Speed); //右后
/**
* Function Car_Run
* @author liusen
* @date 2017.07.17
* @brief 小车前进
* @param[in] Speed (0~7200) 速度范围
* @param[out] void
* @retval void
* @par History 无
*/
void Car_Run(int Speed)
{
LeftMotor_Go();
RightMotor_Go();
LeftMotorPWM(Speed);
RightMotorPWM(Speed);
Left1MotorPWM(Speed);
Right1MotorPWM(Speed);
}
/**
* Function Car_Back
* @author liusen
* @date 2017.07.17
* @brief 小车后退
* @param[in] Speed (0~7200) 速度范围
* @param[out] void
* @retval void
* @par History 无
*/
void Car_Back(int Speed)
{
LeftMotor_Back();
RightMotor_Back();
LeftMotorPWM(Speed);
RightMotorPWM(Speed);
Left1MotorPWM(Speed);
Right1MotorPWM(Speed);
}
/**
* Function Car_Left
* @author liusen
* @date 2017.07.17
* @brief 小车左转
* @param[in] Speed (0~7200) 速度范围
* @param[out] void
* @retval void
* @par History 无
*/
void Car_Left(int Speed)
{
LeftMotor_Stop();
RightMotor_Go();
LeftMotorPWM(0);
RightMotorPWM(Speed);
Left1MotorPWM(0);
Right1MotorPWM(Speed);
}
/**
* Function Car_Right
* @author liusen
* @date 2017.07.17
* @brief 小车右转
* @param[in] Speed (0~7200) 速度范围
* @param[out] void
* @retval void
* @par History 无
*/
void Car_Right(int Speed)
{
LeftMotor_Go();
RightMotor_Stop();
LeftMotorPWM(Speed);
RightMotorPWM(0);
Left1MotorPWM(Speed);
Right1MotorPWM(0);
}
/**
* Function Car_Stop
* @author liusen
* @date 2017.07.17
* @brief 小车刹车
* @param[in] void
* @param[out] void
* @retval void
* @par History 无
*/
void Car_Stop(void)
{
LeftMotor_Stop();
RightMotor_Stop();
LeftMotorPWM(0);
RightMotorPWM(0);
Left1MotorPWM(0);
Right1MotorPWM(0);
}
void Car_Back_Left(int Speed)
{
LeftMotor_Stop();
RightMotor_Back();
LeftMotorPWM(0);
RightMotorPWM(Speed);
Left1MotorPWM(0);
Right1MotorPWM(Speed);
}
void Car_Back_Right(int Speed)
{
LeftMotor_Back();
RightMotor_Stop();
LeftMotorPWM(Speed);
RightMotorPWM(0);
Left1MotorPWM(Speed);
Right1MotorPWM(0);
}
/**
* Function Car_SpinLeft
* @author liusen
* @date 2017.07.17
* @brief 小车左旋
* @param[in] LeftSpeed:左电机速度 RightSpeed:右电机速度 取值范围:(0~7200)
* @param[out] void
* @retval void
* @par History 无
*/
void Car_SpinLeft(int LeftSpeed, int RightSpeed)
{
LeftMotor_Back();
RightMotor_Go();
LeftMotorPWM(LeftSpeed);
RightMotorPWM(RightSpeed);
Left1MotorPWM(LeftSpeed);
Right1MotorPWM(RightSpeed);
}
/**
* Function Car_SpinRight
* @author liusen
* @date 2017.07.17
* @brief 小车右旋
* @param[in] LeftSpeed:左电机速度 RightSpeed:右电机速度 取值范围:(0~7200)
* @param[out] void
* @retval void
* @par History 无
*/
void Car_SpinRight(int LeftSpeed, int RightSpeed)
{
LeftMotor_Go();
RightMotor_Back();
Left1MotorPWM(LeftSpeed);
Right1MotorPWM(RightSpeed);
LeftMotorPWM(LeftSpeed);
RightMotorPWM(RightSpeed);
}
全部程序51hei下载地址:
c8t6小车程序.7z
(321.49 KB, 下载次数: 267)
2019-7-19 18:05 上传
点击文件名下载附件
下载积分: 黑币 -5
作者:
admin
时间:
2019-7-19 18:06
本帖需要重新编辑补全电路原理图,源码,详细说明与图片即可获得100+黑币(帖子下方有编辑按钮)
作者:
liding12356
时间:
2020-12-28 10:18
我想问一下楼主大神,就APP控制的这个部分,APP的蓝牙这边厂商来给的吗?
作者:
一心汤
时间:
2023-10-29 22:14
请问这个引脚怎么接线的
欢迎光临 (http://www.51hei.com/bbs/)
Powered by Discuz! X3.1

 c8t6小车程序.7z
(321.49 KB, 下载次数: 267)
c8t6小车程序.7z
(321.49 KB, 下载次数: 267)