标题:
Arduino中在循迹基础上能够避障(找到障碍物)然后回到黑线
[打印本页]
作者:
不会飞的鱼鸭
时间:
2019-9-2 09:03
标题:
Arduino中在循迹基础上能够避障(找到障碍物)然后回到黑线
想在循迹的基础上加上循迹,就是小车沿着黑线走,到某一地方能够用超声波识别位置后脱离黑线,经历过动作后再回到黑线。怎么循迹和避障的程序结合起来?
void Distance_test() // 量出前方距离
。。。。。。。(此处省略)
void tracking()
。。。。。。(此处省略)
void loop()
{
tracking();//调用循迹函数
while(1)
{
Distance_test();//测量前方距离
if(Distance < 10)//数值为碰到障碍物的距离,可以按实际情况设置
while(Distance < 10)//再次判断是否有障碍物,若有则转动方向后,继续判断
{
left(5);
back(10);
break(5);
}
else
run();//无障碍物,直行
}
}
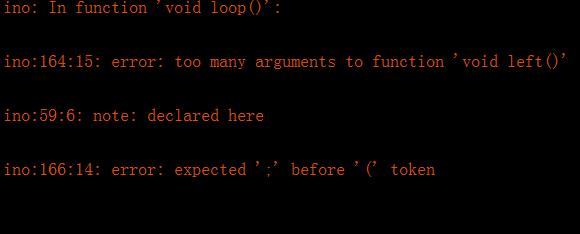
这样写为什么不对???
程序出错.jpg
(12.5 KB, 下载次数: 43)
下载附件
2019-9-2 09:01 上传
欢迎光临 (http://www.51hei.com/bbs/)
Powered by Discuz! X3.1