标题:
STC12C5A60S2单片机双串口同时通讯的完整版modbus程序带看门狗 232及485
[打印本页]
作者:
zhangxinchun
时间:
2019-11-13 00:16
标题:
STC12C5A60S2单片机双串口同时通讯的完整版modbus程序带看门狗 232及485
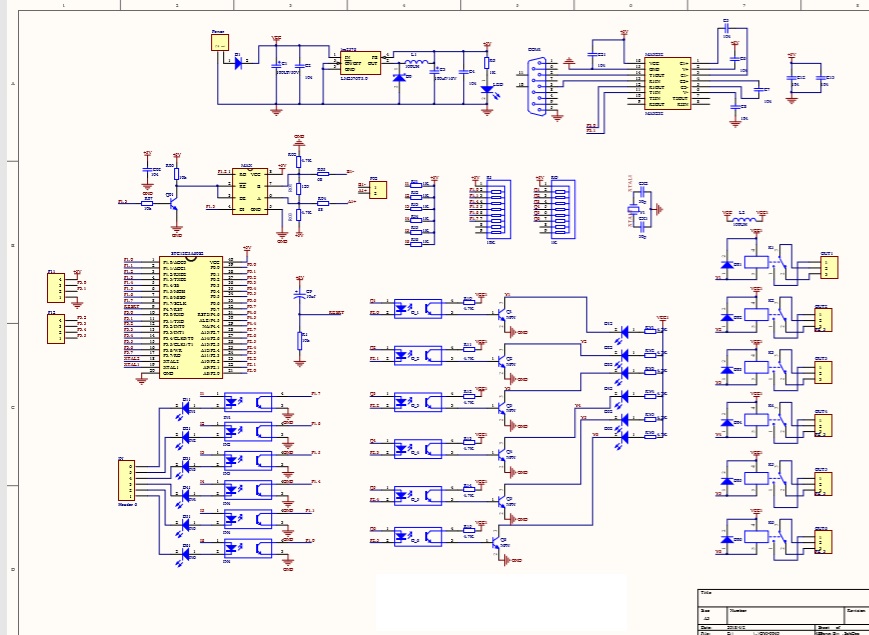
电路原理图如下:
DSC_0211.JPG
(201.3 KB, 下载次数: 70)
下载附件
2019-11-13 00:15 上传
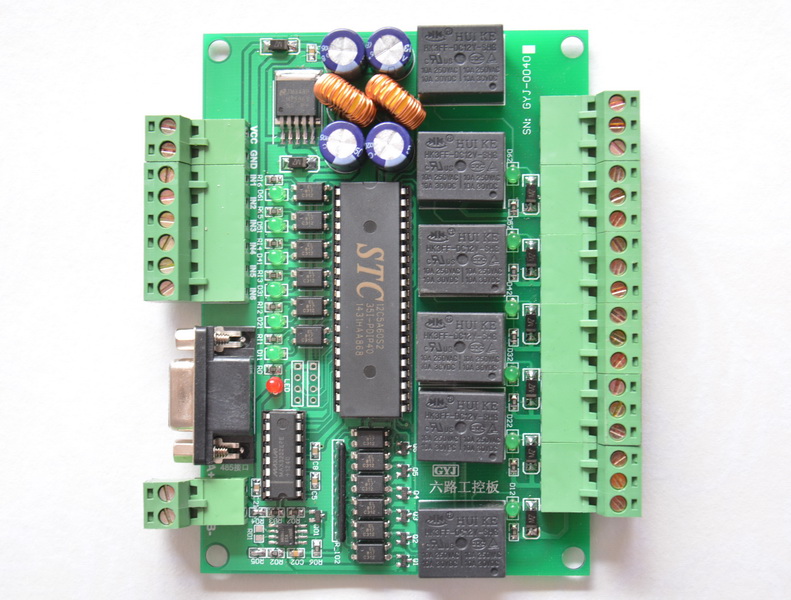
DSC_0212.JPG
(212.65 KB, 下载次数: 53)
下载附件
2019-11-13 00:15 上传
/******************************
程序功能: modbus RTU 模式设置读取十六个继电器状态,以及内部保持寄存器的设置读取
硬件测试环境:单片机stc89C52RC十六继电器485接口控制板
通信协议: 晶振:11.0592 波特率:9600 8位数据 1位停止位 偶校验 485通位接口P3.7控制方向端
控制板地址: 修改localAddr(变量)
线圈个数:16个 线圈地址范围:0x0000~0x000F
保持寄存器个数:16个(字节型) 寄存器地址:0x0000~0x000F
\\******************************\\
功能码简介:
02:读取单个线圈状态
03:读取多个保持寄存器
05:设置单个线圈状态
06:设置单个寄存器值
0F:设置多个线圈
10:设置多个保持寄存器
汇成科技
作者:yang
*******************************/
#include "hader\\main.h"
uint32 dwTickCount,dwIntTick; //时钟
uint8 idata sendBuf[32],receBuf[16]; //发送接收缓冲区
uint8 idata checkoutError; // ==2 偶校验错
uint8 idata receTimeOut; //接收超时
uint8 idata c10ms; //10ms 计时
uint8 idata c200ms;
bit b1ms,bt1ms,b10ms,bt10ms,b100ms,bt100ms; //定时标志位
//定时处理
void timeProc(void)
{
b1ms = 0;
if(bt1ms) //如果1ms到
{
bt1ms = 0;
b1ms = 1;
if(receTimeOut>0) //如果接收超时值>0
{
receTimeOut--; //接收超时-1(1ms减1次)
if(receTimeOut==0 && receCount>0) //判断通讯接收是否超时
{
// b485Send = 0; //将485置为接收状态
receCount = 0; //将接收地址偏移寄存器清零
checkoutError = 0;
}
}
}
} // void TimerProc(void)
//初始化
void initInt(void)
{
SCON = 0xd0;
TMOD = 0x21;
PCON = 0;
TH0 = TIMER_HIGHT;
TL0 = TIMER_LOW;
TH1= 0xfd;
TL1 = 0xfd; //波特率 9600
TR0 = 1;
TR1=1;
ET0 = 1;
ES = 1;
EA = 1;
//串口2设置
S2CON = 0xd0; //方式1,9位数据,波特率不可变 S2TB8 偶校验位
BRT=0XFD; //设置波特率9600
AUXR=0x10; //启动串口1波特率发生器
IP=0x00; //优先级默认 //开串口1中断
IE2=0x01; //开串口2中断
}
//初始化
void initProg(void)
{
P4SW|=0x20; //配置P4.5为IO口
P4M0|=0x10; //配置P4.4为IO口
P4M1|=0x10;
P0=P1=P2=P3=0xff;
P4|=0x30;
initInt(); //初始化定时器
// b485Send = 0;
}
//上电时读取上次线圈状态,并设置
void forceMultipleCoils1()
{
uint8 tempAddr;
uint8 i,k;
uint8 Data;
uint8 exit = 0;
for(k=0;k<4;k++)
{
switch(k)
{
case 0:Data=coilreg1; break;
case 1:Data=coilreg2; break;
case 2:Data=coilreg3; break;
case 3:Data=coilreg4; break;
}
for(i=0;i<8;i++)
{
if( Data &0x01==1)
setCoilVal(tempAddr,0);
else
setCoilVal(tempAddr,1);
Data=Data>>1;
tempAddr++;
if(tempAddr >=32)
{
exit = 1;
break;
}
}
if(exit==1)
break;
}
}
void main(void)
{
initProg();
localAddr=EEPROMReadByte(0); //从EERPOM的相对0地址读取数据
coilreg1=EEPROMReadByte(1);
coilreg2=EEPROMReadByte(2);
coilreg3=EEPROMReadByte(3);
coilreg4=EEPROMReadByte(4);
forceMultipleCoils1();
if(localAddr>=10)
{
localAddr=1;
EEPROMSectorErase(0); //从EEPROM的相对0地址扇区擦除
EEPROMWriteByte(0,localAddr);
EEPROMWriteByte(1,coilreg1);
EEPROMWriteByte(2,coilreg2);
EEPROMWriteByte(3,coilreg1);
EEPROMWriteByte(4,coilreg2);
}
WDT_CONTR =0x32; //大概284.4ms
while(1)
{
timeProc();
checkComm0Modbus();
}
}
//定时器0 1ms 中断
void timer0IntProc() interrupt 1
{
TL0 = TIMER_LOW;
TH0 = TIMER_HIGHT;
dwIntTick++;
bt1ms = 1;
c10ms++;
c200ms++;
if(c10ms >= 10)
{
c10ms = 0; //20ms计时器清零
bt10ms = 1;
WDT_CONTR =0x32; //
}
} // void Timer0IntProc()
// 串行中断1程序
void commIntProc() interrupt 4
{
if(TI)
{
TI = 0;
if(sendPosi < sendCount) //如果发送位置小于发送计数,那么继续发送
{
sendPosi++;
ACC = sendBuf[sendPosi];
TB8 = P; //加上校验位
SBUF = sendBuf[sendPosi];
}
else //否则发送完毕,置接收状态
{
// b485Send = 0; //发送完后将485置于接收状态
receCount = 0; //清接收地址偏移寄存器
checkoutError = 0;
}
}
else if(RI)
{
RI = 0;
receTimeOut = 10; //通讯超时值
receBuf[receCount] = SBUF;
ACC = receBuf[receCount];
if(P != RB8)
checkoutError = 2; //偶校验出错
receCount++; //接收地址偏移寄存器加1
receCount &= 0x0f; //最多一次只能接收16个字节
}
} // void CommIntProc()
//串口2中断
void uart2_isr() interrupt 8
{
if( S2CON & 0x02 )
{
S2CON &= ~0x02;
if(sendPosi<receCount) //如果发送位置小于发送计数,那么继续发送
{
sendPosi++;
ACC = receBuf[sendPosi];
if(P)
S2CON|=0x08; // 7 6 5 4 3 2 1 0 Reset Value
//sfr S2CON = 0x9A; //S2 Control S2SM0 S2SM1 S2SM2 S2REN S2TB8 S2RB8 S2TI S2RI 00000000B
else
S2CON&=0xf7;
S2BUF =receBuf[sendPosi];
}
else //否则发送完毕,置接收状态
{
// b485Send = 0; //发送完后将485置于接收状态
receCount = 0; //清接收地址偏移寄存器
checkoutError = 0;
}
}
else if( S2CON & 0x01)//接收
{
S2CON &= ~0x01;
receTimeOut = 10; //通讯超时值
receBuf[receCount] =S2BUF;
ACC = receBuf[receCount];
// if(P != RB8)
// checkoutError = 2; //偶校验出错
receCount++; //接收地址偏移寄存器加1
receCount &= 0x0f; //最多一次只能接收16个字节
}
}
全部资料51hei下载地址:
完整版modbus6路完善版本(看门狗)232 485.rar
(1.17 MB, 下载次数: 484)
2019-11-13 00:16 上传
点击文件名下载附件
下载积分: 黑币 -5
通过串口1或2与上位机通讯可查询输入输出状态.rar
(91.72 KB, 下载次数: 291)
2019-11-13 00:16 上传
点击文件名下载附件
下载积分: 黑币 -5
上位机通过485、232接口控制测试程序完整版本.rar
(39.27 KB, 下载次数: 323)
2019-11-13 00:16 上传
点击文件名下载附件
下载积分: 黑币 -5
作者:
gongzhu
时间:
2019-12-20 17:38
搞工控正需要!
作者:
难得糊涂2018
时间:
2019-12-24 19:29
这个可以连触摸屏吗
作者:
jovew
时间:
2019-12-26 10:42
能不能提供原理图 和 PCB 文件,这个文件不清楚。
作者:
renwenjun1
时间:
2020-2-16 16:30
学习了,谢谢
作者:
wapian
时间:
2020-5-22 11:14
学习,下载看看
作者:
h201981
时间:
2020-6-20 08:46
谢谢楼主,先下为看看,不知道用不用修改呢。
作者:
PureGear
时间:
2020-12-17 09:48
好歹丢个清晰点的原理图吧
作者:
woyaodwn
时间:
2021-3-6 23:34
这个连触摸屏有人实现了吗
作者:
woyaodwn
时间:
2021-3-6 23:36
压缩包里怎么没有电路图啊
作者:
linhaigood
时间:
2021-12-22 09:56
知识就是力量,顶你
作者:
yxdz1358
时间:
2022-4-30 12:42
楼主无私奉献,这个有实物的产品,带程序,好东西!
作者:
mick32
时间:
2022-4-30 18:25
clear schematic would be nice
Thanks for project
欢迎光临 (http://www.51hei.com/bbs/)
Powered by Discuz! X3.1
 完整版modbus6路完善版本(看门狗)232 485.rar
(1.17 MB, 下载次数: 484)
通过串口1或2与上位机通讯可查询输入输出状态.rar
(91.72 KB, 下载次数: 291)
上位机通过485、232接口控制测试程序完整版本.rar
(39.27 KB, 下载次数: 323)
完整版modbus6路完善版本(看门狗)232 485.rar
(1.17 MB, 下载次数: 484)
通过串口1或2与上位机通讯可查询输入输出状态.rar
(91.72 KB, 下载次数: 291)
上位机通过485、232接口控制测试程序完整版本.rar
(39.27 KB, 下载次数: 323)