标题: MODBUS TCP与机器人通讯,程序样例 [打印本页]
作者: 375683418 时间: 2020-3-31 19:33
标题: MODBUS TCP与机器人通讯,程序样例
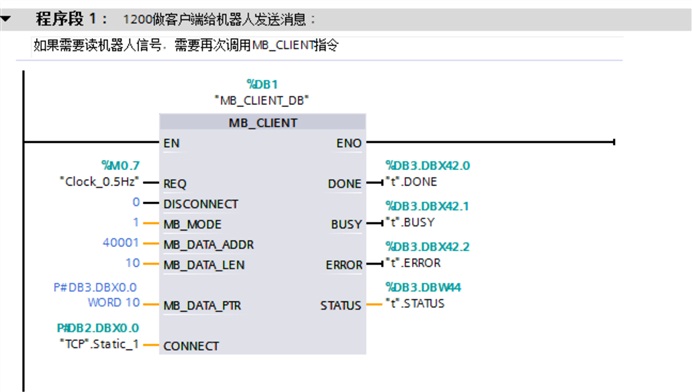
1.EFFORT机器人做服务器(即从站,在MODBUS-TCP中不存在从站的定义)2.在1200PLC中使用的指令MB_CLIENT(客户端);
3.1200指令配置讲解:
REQ:必须选用脉冲触发;
DISCONNECT: {此处填写一个(值为false变量)或为0参数}
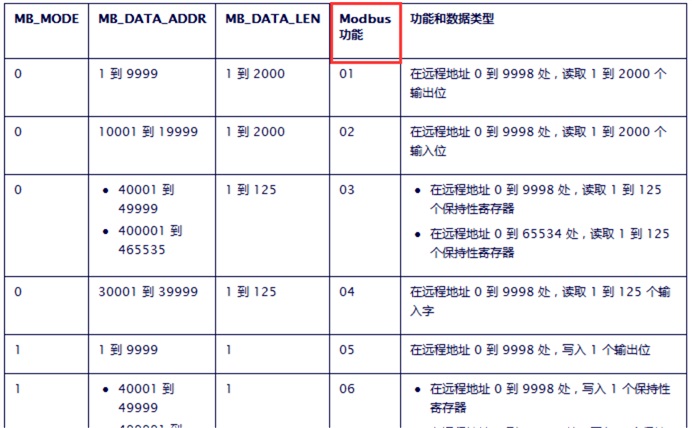
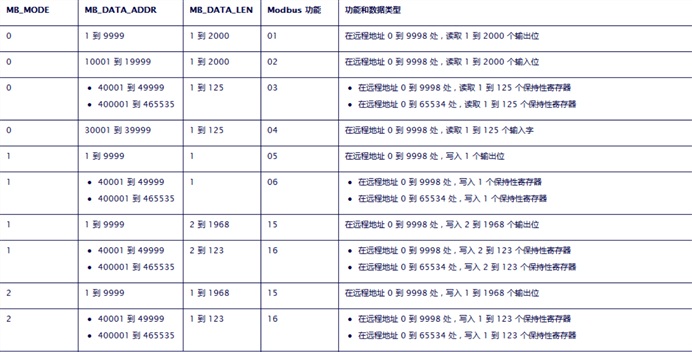
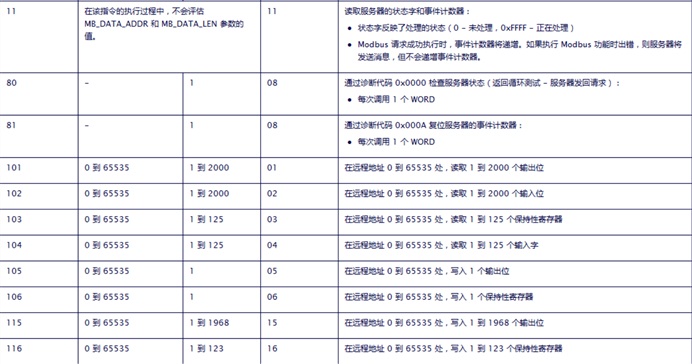
MB_MODE:通讯请求模式(读取/写入或诊断)也可以填写MODBUS 的功能代码,如图:只是提示功能代码的位置;
MODEBUS中MB_MODE表,如下图:
MB_DATA_ADDR: 取决于 MB_MODE,根据MB_MODE来填写;(首先,根据MB_MODE表中的【操作和数据】,确定我们要采集的是什么数据,案例中的数据是给机器人写入数值,如果想读数据,还需再次添加MB_CLIENT指令,同时还要注意存储
全部资料51hei下载地址:
 MODBUS-TCP-Robot.rar
(1.09 MB, 下载次数: 78)
MODBUS-TCP-Robot.rar
(1.09 MB, 下载次数: 78)
作者: huangzhenran 时间: 2021-9-19 09:29
楼主你好,能详细讲讲mb_mode的作用吗?使用PLC之间进行MODBUSTCp通讯,读写用的0,1没问题。但读写机器人的时候,就怎么弄都不成功。连接能成功,但就是无法读写。不是很理解后面的对应地址关系。MB_MODE为什么会有那么多的选择。不是01就可以了吗?
作者: huangzhenran 时间: 2021-9-19 09:31
mbmode为什么会有这么多的选择。我用来和机器人通讯就是不行啊。01 不行。116 103 也不行。是不是后面的地址不对啊。机器人的整数型地址是30000,应该怎么写呢?请教请教!
作者: chrislwq 时间: 2021-11-27 17:09
以为有ABB机器人的程序呢。不过还是谢谢楼主。
| 欢迎光临 (http://www.51hei.com/bbs/) |
Powered by Discuz! X3.1 |