标题:
用STM32F103读取MPU605陀螺仪、加速度、角度的数据
[打印本页]
作者:
FredZhu
时间:
2020-8-26 21:20
标题:
用STM32F103读取MPU605陀螺仪、加速度、角度的数据
1 介绍
大家从标题中来看呢,大家可能会有些困惑,MPU6050只输出加速度、陀螺仪。没有角度。这个也是我今天想和大家说的。最近我做了一个倾角项目。老板基于成本考虑希望我能用MPU6050去算出来角度。说实话自己没接触这个东西,去搞的时候才知道挺难的,很地方看不懂。然后我去看过了正电原子的MPU6050的解算。但是那个角度的结果和我想要精度有点差别。无意中呢在淘宝上搜到了一个维特智能的JY61模块。这个模块的内置的就是MPU6050模块。这个商家说它的静态角度的精度为0.05度、动态0.1度。这个精度是很符合我的需求。给大家看下这个模块
这个模块体积很小巧就15×15×2mm大小。串口通讯用单片机去获取数据很简单,相比起直接去获取MPU6050简单不知道多少倍了。下面和大家说说我是怎么去用STM32F103读取JY62陀螺仪、加速度、角度的数据。
2 开发准备
讲程序之前呢,和大家简单的说说一些硬件、软件准备和JY61怎么和STM32F103接线的。
2.1硬件、软件准备
硬件:JY61模块、USB-TTL、STM32F103开发板、杜邦线。
软件 :
https://pan.baidu.com/s/1SEWmixu4jtUL2HH_3Hcn2g
提取码:zryo
这个是我的写的一个 示例代码大家有兴趣的可以看下:
https://pan.baidu.com/s/1sXnlT89FTTs5tONLiaPihw
2.2 接线方式
1、使用USB-TTL将STM32F103C8T6与电脑连接通信
2、JY61与STM32F103C8T6使用杜邦线连接。具体接线如下图所示:
具体接线方式如下:
USB-TTL---------------STM32F103C8T6---------------JY61
VCC-------------- VCC -------------------------VCC
TX-------------------RX1(PA10),PA3---------------------------TX
RX-------------------TX1(PA9),PA2----------------------------RX
GND------------------GND, GND----------------------------GND
3 程序讲解
3.1程序思路讲解
好了到大家最关心的地方了。在这里呢。我先和大家说下。我的整体思路是什么。我直接把我们的main.c函数放在下面给大家看下。
[backcolor=inherit !important]#[backcolor=inherit !important]include[backcolor=inherit !important]
[backcolor=inherit !important]<string.h>
[backcolor=inherit !important]#[backcolor=inherit !important]include[backcolor=inherit !important]
[backcolor=inherit !important]<stdio.h>
[backcolor=inherit !important]#[backcolor=inherit !important]include[backcolor=inherit !important]
[backcolor=inherit !important]"Main.h"
[backcolor=inherit !important]#[backcolor=inherit !important]include[backcolor=inherit !important]
[backcolor=inherit !important]"UART1.h"
[backcolor=inherit !important]#[backcolor=inherit !important]include[backcolor=inherit !important]
[backcolor=inherit !important]"UART2.h"
[backcolor=inherit !important]#[backcolor=inherit !important]include[backcolor=inherit !important]
[backcolor=inherit !important]"delay.h"
[backcolor=inherit !important]#[backcolor=inherit !important]include[backcolor=inherit !important]
[backcolor=inherit !important]"JY61.h"
[backcolor=inherit !important]#[backcolor=inherit !important]include[backcolor=inherit !important]
[backcolor=inherit !important]"DIO.h"
[backcolor=inherit !important]struct
[backcolor=inherit !important]SAcc stcAcc
[backcolor=inherit !important];
[backcolor=inherit !important]struct
[backcolor=inherit !important]SGyro stcGyro
[backcolor=inherit !important];
[backcolor=inherit !important]struct
[backcolor=inherit !important]SAngle stcAngle
[backcolor=inherit !important];
[backcolor=inherit !important]//CopeSerialData为串口2中断调用函数,串口每收到一个数据,调用一次这个函数。
[backcolor=inherit !important]void
[backcolor=inherit !important]CopeSerial2Data
[backcolor=inherit !important](
[backcolor=inherit !important]unsigned
[backcolor=inherit !important]char
ucData
[backcolor=inherit !important])
[backcolor=inherit !important]{
[backcolor=inherit !important]static
[backcolor=inherit !important]unsigned
[backcolor=inherit !important]char
ucRxBuffer
[backcolor=inherit !important][
[backcolor=inherit !important]250
[backcolor=inherit !important]]
[backcolor=inherit !important];
[backcolor=inherit !important]static
[backcolor=inherit !important]unsigned
[backcolor=inherit !important]char
ucRxCnt
=
[backcolor=inherit !important]0
[backcolor=inherit !important];
[backcolor=inherit !important]LED_REVERSE
[backcolor=inherit !important](
[backcolor=inherit !important])
[backcolor=inherit !important];
[backcolor=inherit !important]//接收到数据,LED灯闪烁一下
ucRxBuffer
[backcolor=inherit !important][
ucRxCnt
++
[backcolor=inherit !important]]
=
ucData
[backcolor=inherit !important];
[backcolor=inherit !important]//将收到的数据存入缓冲区中
[backcolor=inherit !important]if
[backcolor=inherit !important](
ucRxBuffer
[backcolor=inherit !important][
[backcolor=inherit !important]0
[backcolor=inherit !important]]
!=
[backcolor=inherit !important]0x55
[backcolor=inherit !important])
[backcolor=inherit !important]//数据头不对,则重新开始寻找0x55数据头
[backcolor=inherit !important]{
ucRxCnt
=
[backcolor=inherit !important]0
[backcolor=inherit !important];
[backcolor=inherit !important]return
[backcolor=inherit !important];
[backcolor=inherit !important]}
[backcolor=inherit !important]if
[backcolor=inherit !important](
ucRxCnt
<
[backcolor=inherit !important]11
[backcolor=inherit !important])
[backcolor=inherit !important]{
[backcolor=inherit !important]return
[backcolor=inherit !important];
[backcolor=inherit !important]}
[backcolor=inherit !important]//数据不满11个,则返回
[backcolor=inherit !important]else
[backcolor=inherit !important]{
[backcolor=inherit !important]switch
[backcolor=inherit !important](
ucRxBuffer
[backcolor=inherit !important][
[backcolor=inherit !important]1
[backcolor=inherit !important]]
[backcolor=inherit !important])
[backcolor=inherit !important]//判断数据是哪种数据,然后将其拷贝到对应的结构体中,有些数据包需要通过上位机打开对应的输出后,才能接收到这个数据包的数据
[backcolor=inherit !important]{
[backcolor=inherit !important]//memcpy为编译器自带的内存拷贝函数,需引用"string.h",将接收缓冲区的字符拷贝到数据结构体里面,从而实现数据的解析。
[backcolor=inherit !important]case
[backcolor=inherit !important]0x51
:
[backcolor=inherit !important]memcpy
[backcolor=inherit !important](
&
stcAcc
[backcolor=inherit !important],
&
ucRxBuffer
[backcolor=inherit !important][
[backcolor=inherit !important]2
[backcolor=inherit !important]]
[backcolor=inherit !important],
[backcolor=inherit !important]8
[backcolor=inherit !important])
[backcolor=inherit !important];
[backcolor=inherit !important]break
[backcolor=inherit !important];
[backcolor=inherit !important]case
[backcolor=inherit !important]0x52
:
[backcolor=inherit !important]memcpy
[backcolor=inherit !important](
&
stcGyro
[backcolor=inherit !important],
&
ucRxBuffer
[backcolor=inherit !important][
[backcolor=inherit !important]2
[backcolor=inherit !important]]
[backcolor=inherit !important],
[backcolor=inherit !important]8
[backcolor=inherit !important])
[backcolor=inherit !important];
[backcolor=inherit !important]break
[backcolor=inherit !important];
[backcolor=inherit !important]case
[backcolor=inherit !important]0x53
:
[backcolor=inherit !important]memcpy
[backcolor=inherit !important](
&
stcAngle
[backcolor=inherit !important],
&
ucRxBuffer
[backcolor=inherit !important][
[backcolor=inherit !important]2
[backcolor=inherit !important]]
[backcolor=inherit !important],
[backcolor=inherit !important]8
[backcolor=inherit !important])
[backcolor=inherit !important];
[backcolor=inherit !important]break
[backcolor=inherit !important];
[backcolor=inherit !important]}
ucRxCnt
=
[backcolor=inherit !important]0
[backcolor=inherit !important];
[backcolor=inherit !important]//清空缓存区
[backcolor=inherit !important]}
[backcolor=inherit !important]}
[backcolor=inherit !important]void
[backcolor=inherit !important]CopeSerial1Data
[backcolor=inherit !important](
[backcolor=inherit !important]unsigned
[backcolor=inherit !important]char
ucData
[backcolor=inherit !important])
[backcolor=inherit !important]{
[backcolor=inherit !important]UART2_Put_Char
[backcolor=inherit !important](
ucData
[backcolor=inherit !important])
[backcolor=inherit !important];
[backcolor=inherit !important]//转发串口1收到的数据给串口2(JY模块)
[backcolor=inherit !important]}
[backcolor=inherit !important]int
[backcolor=inherit !important]main
[backcolor=inherit !important](
[backcolor=inherit !important]void
[backcolor=inherit !important])
[backcolor=inherit !important]{
[backcolor=inherit !important]unsigned
[backcolor=inherit !important]char
i
=
[backcolor=inherit !important]0
[backcolor=inherit !important];
[backcolor=inherit !important]SysTick_init
[backcolor=inherit !important](
[backcolor=inherit !important]72
[backcolor=inherit !important],
[backcolor=inherit !important]10
[backcolor=inherit !important])
[backcolor=inherit !important];
[backcolor=inherit !important]//设置时钟频率
[backcolor=inherit !important]Initial_UART1
[backcolor=inherit !important](
[backcolor=inherit !important]9600
[backcolor=inherit !important])
[backcolor=inherit !important];
[backcolor=inherit !important]//接PC的串口
[backcolor=inherit !important]Initial_UART2
[backcolor=inherit !important](
[backcolor=inherit !important]115200
[backcolor=inherit !important])
[backcolor=inherit !important];
[backcolor=inherit !important]//接JY61模块的串口
[backcolor=inherit !important]LED_ON
[backcolor=inherit !important](
[backcolor=inherit !important])
[backcolor=inherit !important];
[backcolor=inherit !important]delay_ms
[backcolor=inherit !important](
[backcolor=inherit !important]1000
[backcolor=inherit !important])
[backcolor=inherit !important];
[backcolor=inherit !important]delay_ms
[backcolor=inherit !important](
[backcolor=inherit !important]1000
[backcolor=inherit !important])
[backcolor=inherit !important];
[backcolor=inherit !important]//等等JY61初始化完成
[backcolor=inherit !important]while
[backcolor=inherit !important](
[backcolor=inherit !important]1
[backcolor=inherit !important])
[backcolor=inherit !important]{
[backcolor=inherit !important]delay_ms
[backcolor=inherit !important](
[backcolor=inherit !important]1000
[backcolor=inherit !important])
[backcolor=inherit !important];
[backcolor=inherit !important]//串口接受到的数据已经拷贝到对应的结构体的变量中了,根据说明书的协议,以加速度为例 stcAcc.a[0]/32768*16就是X轴的加速度,
[backcolor=inherit !important]printf
[backcolor=inherit !important](
[backcolor=inherit !important]"Acc:%.3f %.3f %.3f\r\n"
[backcolor=inherit !important],
[backcolor=inherit !important](
[backcolor=inherit !important]float
[backcolor=inherit !important])
stcAcc
[backcolor=inherit !important].
a
[backcolor=inherit !important][
[backcolor=inherit !important]0
[backcolor=inherit !important]]
/
[backcolor=inherit !important]32768
*
[backcolor=inherit !important]16
[backcolor=inherit !important],
[backcolor=inherit !important](
[backcolor=inherit !important]float
[backcolor=inherit !important])
stcAcc
[backcolor=inherit !important].
a
[backcolor=inherit !important][
[backcolor=inherit !important]1
[backcolor=inherit !important]]
/
[backcolor=inherit !important]32768
*
[backcolor=inherit !important]16
[backcolor=inherit !important],
[backcolor=inherit !important](
[backcolor=inherit !important]float
[backcolor=inherit !important])
stcAcc
[backcolor=inherit !important].
a
[backcolor=inherit !important][
[backcolor=inherit !important]2
[backcolor=inherit !important]]
/
[backcolor=inherit !important]32768
*
[backcolor=inherit !important]16
[backcolor=inherit !important])
[backcolor=inherit !important];
[backcolor=inherit !important]delay_ms
[backcolor=inherit !important](
[backcolor=inherit !important]10
[backcolor=inherit !important])
[backcolor=inherit !important];
[backcolor=inherit !important]//输出角速度
[backcolor=inherit !important]printf
[backcolor=inherit !important](
[backcolor=inherit !important]"Gyro:%.3f %.3f %.3f\r\n"
[backcolor=inherit !important],
[backcolor=inherit !important](
[backcolor=inherit !important]float
[backcolor=inherit !important])
stcGyro
[backcolor=inherit !important].
w
[backcolor=inherit !important][
[backcolor=inherit !important]0
[backcolor=inherit !important]]
/
[backcolor=inherit !important]32768
*
[backcolor=inherit !important]2000
[backcolor=inherit !important],
[backcolor=inherit !important](
[backcolor=inherit !important]float
[backcolor=inherit !important])
stcGyro
[backcolor=inherit !important].
w
[backcolor=inherit !important][
[backcolor=inherit !important]1
[backcolor=inherit !important]]
/
[backcolor=inherit !important]32768
*
[backcolor=inherit !important]2000
[backcolor=inherit !important],
[backcolor=inherit !important](
[backcolor=inherit !important]float
[backcolor=inherit !important])
stcGyro
[backcolor=inherit !important].
w
[backcolor=inherit !important][
[backcolor=inherit !important]2
[backcolor=inherit !important]]
/
[backcolor=inherit !important]32768
*
[backcolor=inherit !important]2000
[backcolor=inherit !important])
[backcolor=inherit !important];
[backcolor=inherit !important]delay_ms
[backcolor=inherit !important](
[backcolor=inherit !important]10
[backcolor=inherit !important])
[backcolor=inherit !important];
[backcolor=inherit !important]//输出角度
[backcolor=inherit !important]printf
[backcolor=inherit !important](
[backcolor=inherit !important]"Angle:%.3f %.3f %.3f\r\n"
[backcolor=inherit !important],
[backcolor=inherit !important](
[backcolor=inherit !important]float
[backcolor=inherit !important])
stcAngle
[backcolor=inherit !important].
Angle
[backcolor=inherit !important][
[backcolor=inherit !important]0
[backcolor=inherit !important]]
/
[backcolor=inherit !important]32768
*
[backcolor=inherit !important]180
[backcolor=inherit !important],
[backcolor=inherit !important](
[backcolor=inherit !important]float
[backcolor=inherit !important])
stcAngle
[backcolor=inherit !important].
Angle
[backcolor=inherit !important][
[backcolor=inherit !important]1
[backcolor=inherit !important]]
/
[backcolor=inherit !important]32768
*
[backcolor=inherit !important]180
[backcolor=inherit !important],
[backcolor=inherit !important](
[backcolor=inherit !important]float
[backcolor=inherit !important])
stcAngle
[backcolor=inherit !important].
Angle
[backcolor=inherit !important][
[backcolor=inherit !important]2
[backcolor=inherit !important]]
/
[backcolor=inherit !important]32768
*
[backcolor=inherit !important]180
[backcolor=inherit !important])
[backcolor=inherit !important];
[backcolor=inherit !important]delay_ms
[backcolor=inherit !important](
[backcolor=inherit !important]10
[backcolor=inherit !important])
[backcolor=inherit !important];
[backcolor=inherit !important]//等待传输完成
[backcolor=inherit !important]}
[backcolor=inherit !important]//主循环
[backcolor=inherit !important]}
其实一共就分为三个部分。
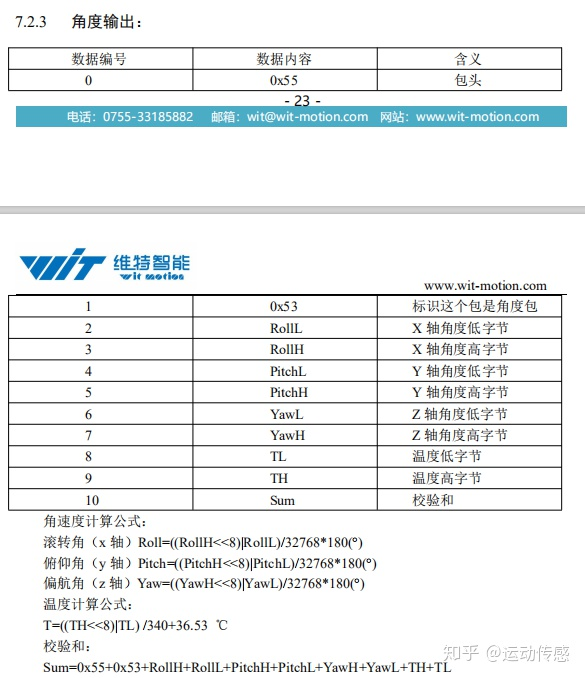
第一部分,为串口2中断调用函数CopeSerialData,串口每收到一个数据,调用一次这个函数。把串口2获取到的数据存在ucRxBuffer这个数组里。然后根据JY61的通讯协议(如下图所示)去做一个数据检验判断。判断完后呢,就到了一个memcpy这个复制函数。不懂这个函数的可以看这个链接:
运动传感:STM32中的memcpy函数的使用
我和大家说个结果。比如说加速度,memcpy函数就是把ucRxBuffer的数据复制到stcAcc这个结构体里了,剩下的以此类推。到这里这里的第一部分就结束了。
JY61的通讯协议
第二部分,CopeSerial1Data。很简单的就是转发串口1收到的数据给串口2(JY模块)。
第三部分,就是数据处理部分了。以加速度为例子。
[backcolor=inherit !important]printf
[backcolor=inherit !important](
[backcolor=inherit !important]"Acc:%.3f %.3f %.3f\r\n"
[backcolor=inherit !important],
[backcolor=inherit !important](
[backcolor=inherit !important]float
[backcolor=inherit !important])
stcAcc
[backcolor=inherit !important].
a
[backcolor=inherit !important][
[backcolor=inherit !important]0
[backcolor=inherit !important]]
/
[backcolor=inherit !important]32768
*
[backcolor=inherit !important]16
[backcolor=inherit !important],
[backcolor=inherit !important](
[backcolor=inherit !important]float
[backcolor=inherit !important])
stcAcc
[backcolor=inherit !important].
a
[backcolor=inherit !important][
[backcolor=inherit !important]1
[backcolor=inherit !important]]
/
[backcolor=inherit !important]32768
*
[backcolor=inherit !important]16
[backcolor=inherit !important],
[backcolor=inherit !important](
[backcolor=inherit !important]float
[backcolor=inherit !important])
stcAcc
[backcolor=inherit !important].
a
[backcolor=inherit !important][
[backcolor=inherit !important]2
[backcolor=inherit !important]]
/
[backcolor=inherit !important]32768
*
[backcolor=inherit !important]16
[backcolor=inherit !important])
[backcolor=inherit !important];
[backcolor=inherit !important]delay_ms
[backcolor=inherit !important](
[backcolor=inherit !important]10
[backcolor=inherit !important])
[backcolor=inherit !important];
stcAcc这个前面讲了就是复制结束的结果。根据上面的JY61的通讯协议。/32768*16这些都是为了把JY61输出的16进制的原始数据转成成有符号的10进制的数据。然后把得到的结果输出到串口1。
以上三个部分呢,就是我的主要编程思路了。下面给大家讲讲一些细节方面的函数。
3.2 关键底层函数说
从上面的接线可以看出呢。一共用了32单片机的两个UART引脚。一个是UART1这个是把处理过的数据发送到PC端。一个是UART2这个是用来接收JY61传过来的数据。UART2也是使用中断来接收到数据。这些都是在初始化UART2的时候来配置的。前面那部分都是默认的串口配置。设置波特率、数据位8位、停止位1、无奇偶检验、配置串口模式。最后再初始化USART2。一般都是固定的。后面的USART_ITConfig。就是开启串口中断。
[backcolor=inherit !important]void
[backcolor=inherit !important]Initial_UART2
[backcolor=inherit !important](
[backcolor=inherit !important]unsigned
[backcolor=inherit !important]long
baudrate
[backcolor=inherit !important])
[backcolor=inherit !important]{
GPIO_InitTypeDef GPIO_InitStructure
[backcolor=inherit !important];
USART_InitTypeDef USART_InitStructure
[backcolor=inherit !important];
NVIC_InitTypeDef NVIC_InitStructure
[backcolor=inherit !important];
[backcolor=inherit !important]RCC_APB1PeriphClockCmd
[backcolor=inherit !important](
RCC_APB1Periph_USART2
|
RCC_APB2Periph_GPIOA
[backcolor=inherit !important],
ENABLE
[backcolor=inherit !important])
[backcolor=inherit !important];
GPIO_InitStructure
[backcolor=inherit !important].
GPIO_Pin
=
GPIO_Pin_2
[backcolor=inherit !important];
GPIO_InitStructure
[backcolor=inherit !important].
GPIO_Mode
=
GPIO_Mode_AF_PP
[backcolor=inherit !important];
GPIO_InitStructure
[backcolor=inherit !important].
GPIO_Speed
=
GPIO_Speed_50MHz
[backcolor=inherit !important];
[backcolor=inherit !important]GPIO_Init
[backcolor=inherit !important](
GPIOA
[backcolor=inherit !important],
&
GPIO_InitStructure
[backcolor=inherit !important])
[backcolor=inherit !important];
GPIO_InitStructure
[backcolor=inherit !important].
GPIO_Pin
=
GPIO_Pin_3
[backcolor=inherit !important];
GPIO_InitStructure
[backcolor=inherit !important].
GPIO_Mode
=
GPIO_Mode_IN_FLOATING
[backcolor=inherit !important];
[backcolor=inherit !important]GPIO_Init
[backcolor=inherit !important](
GPIOA
[backcolor=inherit !important],
&
GPIO_InitStructure
[backcolor=inherit !important])
[backcolor=inherit !important];
USART_InitStructure
[backcolor=inherit !important].
USART_BaudRate
=
baudrate
[backcolor=inherit !important];
USART_InitStructure
[backcolor=inherit !important].
USART_WordLength
=
USART_WordLength_8b
[backcolor=inherit !important];
USART_InitStructure
[backcolor=inherit !important].
USART_StopBits
=
USART_StopBits_1
[backcolor=inherit !important];
USART_InitStructure
[backcolor=inherit !important].
USART_Parity
=
USART_Parity_No
[backcolor=inherit !important];
USART_InitStructure
[backcolor=inherit !important].
USART_HardwareFlowControl
=
USART_HardwareFlowControl_None
[backcolor=inherit !important];
USART_InitStructure
[backcolor=inherit !important].
USART_Mode
=
USART_Mode_Rx
|
USART_Mode_Tx
[backcolor=inherit !important];
[backcolor=inherit !important]USART_Init
[backcolor=inherit !important](
USART2
[backcolor=inherit !important],
&
USART_InitStructure
[backcolor=inherit !important])
[backcolor=inherit !important];
[backcolor=inherit !important]USART_ITConfig
[backcolor=inherit !important](
USART2
[backcolor=inherit !important],
USART_IT_TXE
[backcolor=inherit !important],
DISABLE
[backcolor=inherit !important])
[backcolor=inherit !important];
[backcolor=inherit !important]//串口2的发送端TX是不使能的
[backcolor=inherit !important]USART_ITConfig
[backcolor=inherit !important](
USART2
[backcolor=inherit !important],
USART_IT_RXNE
[backcolor=inherit !important],
ENABLE
[backcolor=inherit !important])
[backcolor=inherit !important];
[backcolor=inherit !important]//串口2的接收端的RX使能
[backcolor=inherit !important]USART_ClearFlag
[backcolor=inherit !important](
USART2
[backcolor=inherit !important],
USART_FLAG_TC
[backcolor=inherit !important])
[backcolor=inherit !important];
[backcolor=inherit !important]USART_Cmd
[backcolor=inherit !important](
USART2
[backcolor=inherit !important],
ENABLE
[backcolor=inherit !important])
[backcolor=inherit !important];
NVIC_InitStructure
[backcolor=inherit !important].
NVIC_IRQChannel
=
USART2_IRQn
[backcolor=inherit !important];
NVIC_InitStructure
[backcolor=inherit !important].
NVIC_IRQChannelPreemptionPriority
=
[backcolor=inherit !important]1
[backcolor=inherit !important];
NVIC_InitStructure
[backcolor=inherit !important].
NVIC_IRQChannelSubPriority
=
[backcolor=inherit !important]8
[backcolor=inherit !important];
NVIC_InitStructure
[backcolor=inherit !important].
NVIC_IRQChannelCmd
=
ENABLE
[backcolor=inherit !important];
[backcolor=inherit !important]NVIC_Init
[backcolor=inherit !important](
&
NVIC_InitStructure
[backcolor=inherit !important])
[backcolor=inherit !important];
[backcolor=inherit !important]}
使能串口中断后呢。UART2的数据都会一个个字节的往DR寄存器里面写。就是第一部分调用的那个中断函数CopeSerial2Data。整体来就是给大家介绍下数据是怎么来的。底层中断函数说明
[backcolor=inherit !important]void
[backcolor=inherit !important]USART2_IRQHandler
[backcolor=inherit !important](
[backcolor=inherit !important]void
[backcolor=inherit !important])
[backcolor=inherit !important]{
[backcolor=inherit !important]if
[backcolor=inherit !important](
[backcolor=inherit !important]USART_GetITStatus
[backcolor=inherit !important](
USART2
[backcolor=inherit !important],
USART_IT_TXE
[backcolor=inherit !important])
!=
RESET
[backcolor=inherit !important])
[backcolor=inherit !important]//由于TX中断被禁止了所以这个if是不会进入的。
[backcolor=inherit !important]{
[backcolor=inherit !important]USART_SendData
[backcolor=inherit !important](
USART2
[backcolor=inherit !important],
TxBuffer
[backcolor=inherit !important][
TxCounter
++
[backcolor=inherit !important]]
[backcolor=inherit !important])
[backcolor=inherit !important];
[backcolor=inherit !important]USART_ClearITPendingBit
[backcolor=inherit !important](
USART2
[backcolor=inherit !important],
USART_IT_TXE
[backcolor=inherit !important])
[backcolor=inherit !important];
[backcolor=inherit !important]if
[backcolor=inherit !important](
TxCounter
==
count
[backcolor=inherit !important])
[backcolor=inherit !important]USART_ITConfig
[backcolor=inherit !important](
USART2
[backcolor=inherit !important],
USART_IT_TXE
[backcolor=inherit !important],
DISABLE
[backcolor=inherit !important])
[backcolor=inherit !important];
[backcolor=inherit !important]}
[backcolor=inherit !important]else
[backcolor=inherit !important]if
[backcolor=inherit !important](
[backcolor=inherit !important]USART_GetITStatus
[backcolor=inherit !important](
USART2
[backcolor=inherit !important],
USART_IT_RXNE
[backcolor=inherit !important])
!=
RESET
[backcolor=inherit !important])
[backcolor=inherit !important]//直接进入RX的这个中断
[backcolor=inherit !important]{
[backcolor=inherit !important]CopeSerial2Data
[backcolor=inherit !important](
[backcolor=inherit !important](
[backcolor=inherit !important]unsigned
[backcolor=inherit !important]char
[backcolor=inherit !important])
USART2
->
DR
[backcolor=inherit !important])
[backcolor=inherit !important];
[backcolor=inherit !important]//把UART2的数据给到DR寄存器后呢,再由这个CopeSerial2Data函数把数据给到给出去了
[backcolor=inherit !important]USART_ClearITPendingBit
[backcolor=inherit !important](
USART2
[backcolor=inherit !important],
USART_IT_RXNE
[backcolor=inherit !important])
[backcolor=inherit !important];
[backcolor=inherit !important]}
[backcolor=inherit !important]USART_ClearITPendingBit
[backcolor=inherit !important](
USART2
[backcolor=inherit !important],
USART_IT_ORE
[backcolor=inherit !important])
[backcolor=inherit !important];
[backcolor=inherit !important]}
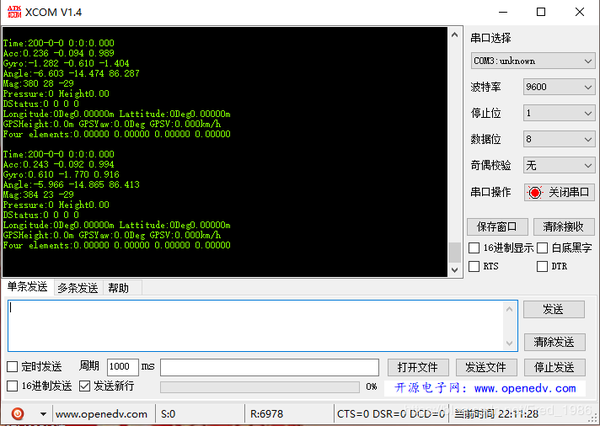
## 6 输出结果显示
在电脑上正确连接好板子,首先打开串口调试助手,找到相应的端口,然后打开串口,注意这里波特率设置为9600,然后就可以观察到左边的窗口有数据输出了。如图所示:
欢迎光临 (http://www.51hei.com/bbs/)
Powered by Discuz! X3.1