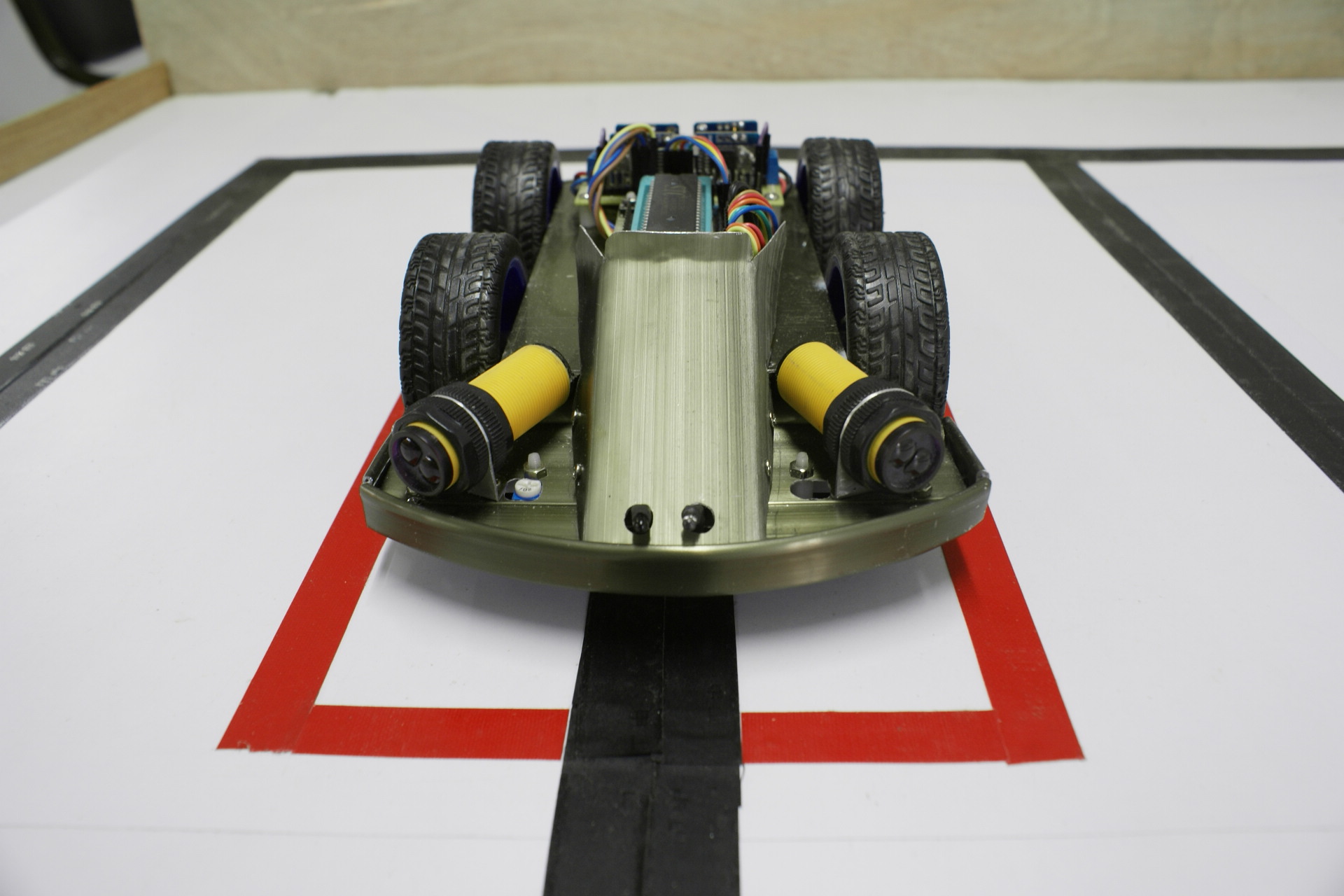
DSC05239.JPG (375.28 KB, 下载次数: 192)
下载附件
2015-3-20 06:11 上传
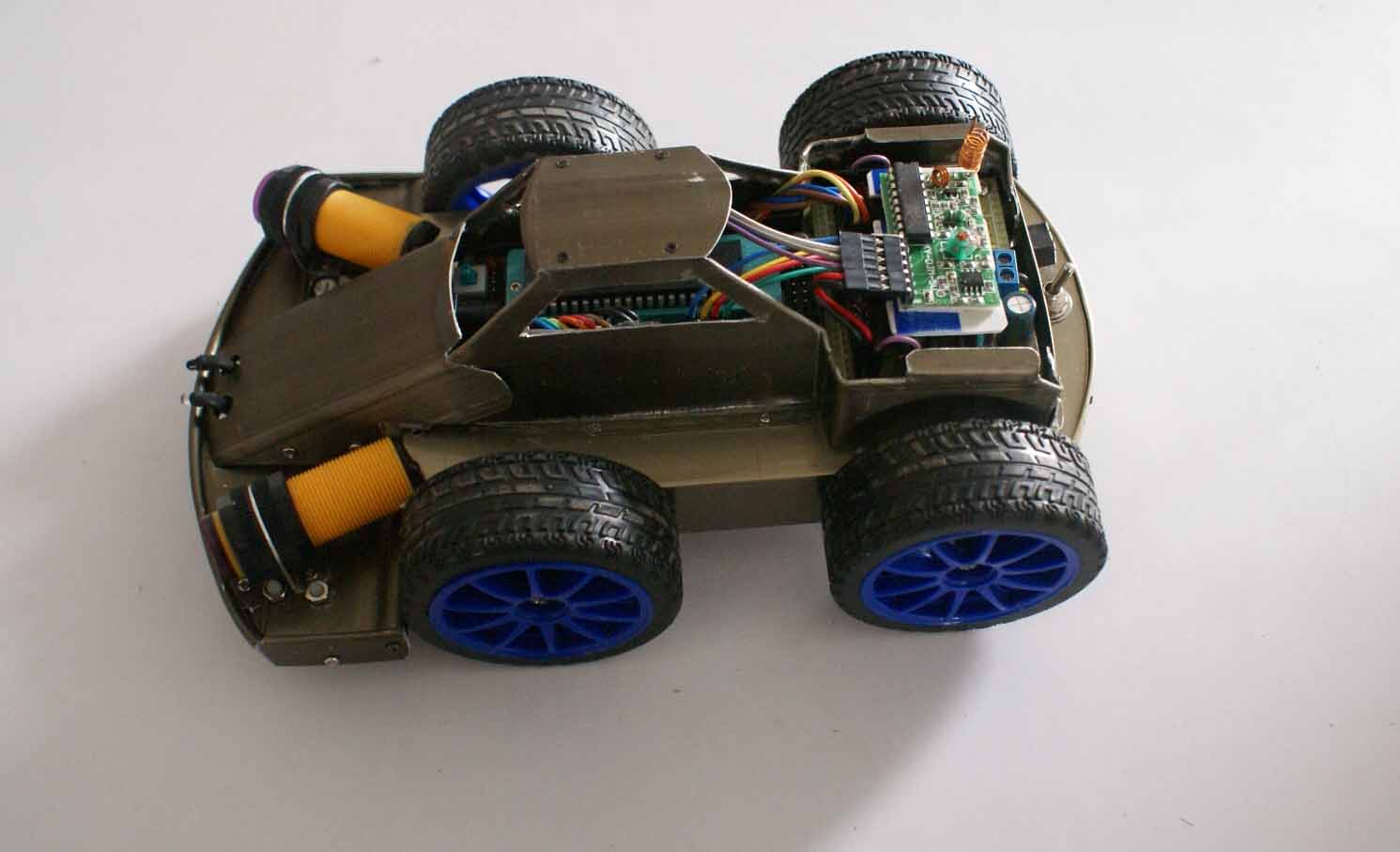
19 全部完工后的小车.JPG (73.07 KB, 下载次数: 223)
2015-3-20 06:13 上传