标题:
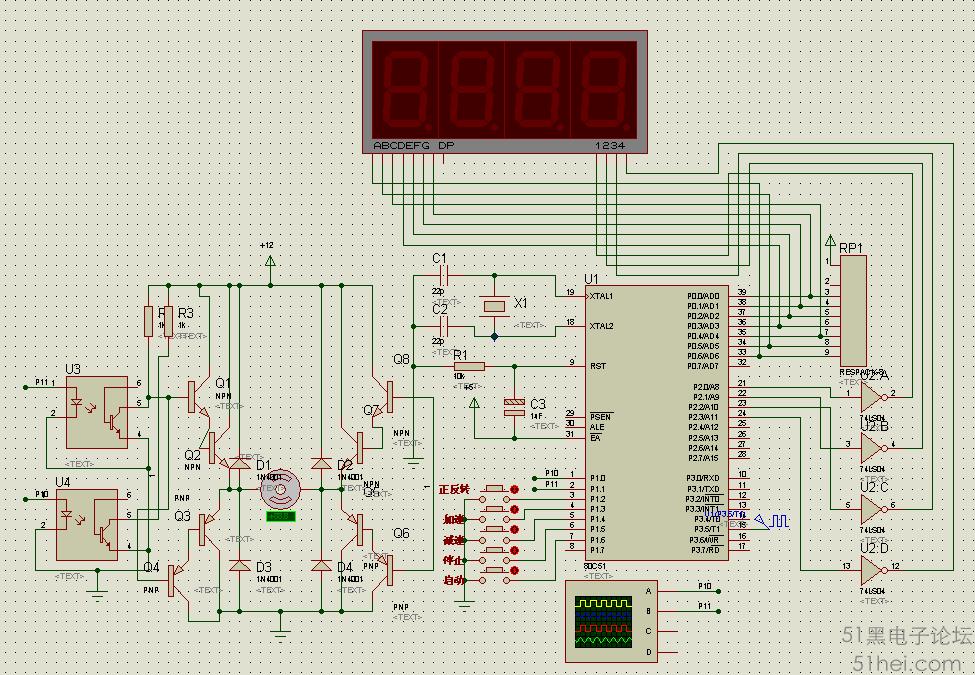
基于单片机AT89C51的直流电机PWM调速控制系统
[打印本页]
作者:
51黑er
时间:
2015-11-2 14:09
标题:
基于单片机AT89C51的直流电机PWM调速控制系统
仿真整体图如下:
这是我用洞洞板与腐蚀板制作的样品,仅供参考
元件
数量(个)
元件
数量(个)
光电耦合器:TLP521-2
1
三极管8550
4
按键
5
三极管8050
5
自锁按键
1
1N4007
4
At89s52
1
四位一体数码管
1
12M晶振
1
电容104
1
Led
1
直流电机
1
电阻1K
3
电容22P
2
电阻10K
1
电解电容47P/16V
2
74LS04
1
下载口
1
以下是Keil 4 编写的源程序
/************头文件*********/
#include<reg51.h>
#include<absacc.h>
#include <intrins.h>
/********自定义变量********/
#define uint unsigned int //自定义变量
#define uchar unsigned char
char gw,sw,bw,qw;
uchar j; //定时次数,每次20ms
uchar f=5; //计数的次数
sbit P10=P1^0; //PWM输出波形1
sbit P11=P1^1; //PWM输出波形2
sbit P12=P1^2; //正反转
sbit P13=P1^3; //加速
sbit P14=P1^4; //减速
sbit P15=P1^5; //停止
sbit P16=P1^6; //启动
uchar k;
uchar t; //脉冲加减
/**************************/*
/*********控制位定义********************/
uchar code smg[12]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x73,0x71};//程序存储区定义字型码表
char data led[4]={0x08,0x04,0x02,0x01}; //位码
uint x; //数码管显示的数值
display(); //数码管显示
delays(); //延时函数
key();
displays();
/*****************************************/
/***************主函数********************/
main (void)
{
TMOD=0x51; //T0方式1 定时计数T1方式1计数
TH0=0xb1; //装入初值 20MS
TL0=0xe0;
TH1=0x00; // 计数567
TL1=0x00;
TR0=1; //启动 t0
TR1=1; //启动t1
gw=sw=bw=qw=0; //数码管初始化
P0=0xc0;
P2=1;
while(1) //无限循环
{
display(); //数码管显示
key();
}
}
/*****************************************/
/***************数码管显示****************/
display()
{
uchar i;
gw=x%10; //求速度个位值,送到个位显示缓冲区
sw=(x/10)%10; //求速度十位值,送到十位显示缓冲区
bw=(x/100)%10; //求速度百位值,送到百位显示缓冲区
qw=x/1000; //求速度千位值,送到千位显示缓冲区
for(i=0;i<4;)
{
P2=led[i];
if(i==0) //显示个位
{
P0=smg[gw];
delays();
}
else if(i==1) //显示十位
{
P0=smg[sw];
delays();
}
else if(i==2) //显示百位
{
P0=smg[bw];
delays();
}
else if(i==3) //显示千位
{
if(k==0)//正转时显示"三"
{
P0=0x49;
delays();
}
else
{
P0=0x71; //反转时显示"F"
}
}
i++;
}
}
/*******************************************************/
/*****************延时函数*************************/
delays()
{
uchar i;
for(i=5000;i>0;i--);
}
/************************************************/
/*********t0定时*中断函数*************/
void t0() interrupt 1 using 2
{
TH0=0xb1; //重装t0
TL0=0xe0;
f--;
if(k==0)
{
if(f<t)
P10=1;
else
P10=0;
P11=0;
}
else
{
if(f<t)
P11=1;
else
P11=0;
P10=0;
}
if(f==0)
{
f=5;
}
j++;
if(j==50)
{
j=0;
x=TH1*256+TL1; //t1方式1计数,读入计数值
TH1=0x00;
TL1=0x00;
x++;
display();
}
}
/****************按键扫描**************/
key()
{
if(P12==0) //如果按下,
{
while(!P12) //去抖动
display();
k=~k;
}
if(P16==0) //启动
{
while(P16==0);
IE=0x8a;
}
if(P13==0) //加速
{
while (P13==0);
t++;
}
if(t>=5)
t=5;
if(P14==0) //减速
{
while(P14==0);
t--;
}
if(t<1)
t=1;
if(P15==0) //停止
{
while(P15==0);
EA=0;
P10=0;
P11=0;
}
}
/******************************************************/
复制代码
作者:
lxa0
时间:
2015-11-2 20:35
好似H桥有点~~~~~~~~~
作者:
一见你就笑123
时间:
2016-5-2 12:14
谢谢分享
作者:
一见你就笑123
时间:
2016-5-3 11:09
请问大神,H桥左边的那一部分是什么
作者:
哈哈嘻嘻
时间:
2016-6-30 11:21
有没有 仿真程序啊 我需要
作者:
qiyezao
时间:
2016-7-1 13:37
请问STC89C52RC可用直接代用吗?
作者:
G流星雨
时间:
2016-8-16 16:56
楼主的头文件有吗?新手借鉴,非常感谢
作者:
松山虎
时间:
2016-11-2 19:20
有没有排列好的程序图
作者:
wenwen520
时间:
2016-12-26 15:39
有个仿真图就好了
作者:
sjg119110
时间:
2016-12-28 13:44
电路感觉有点问题
作者:
大大29
时间:
2017-1-11 04:33
顶一下 谢谢分享
作者:
mslong
时间:
2017-2-14 14:21
c43和141有错误
编译不了
作者:
li3
时间:
2017-3-24 10:48
非常给力
作者:
ca2008
时间:
2017-5-4 17:56
厉害,大神
作者:
凤凰123
时间:
2017-5-8 20:19
谢谢楼主,非常有用
作者:
馆长
时间:
2017-5-12 14:16
不知道怎么下载下来
作者:
1191562740
时间:
2017-6-23 10:13
没有仿真文件么
作者:
51黑电子会员
时间:
2017-9-20 11:25
程序错那么多,还敢放出来,真是丢人啊。
作者:
51黑电子会员
时间:
2017-9-20 11:28
程序错那么多,还敢放出来,哎,还是高级工程师,还不如业余的。
作者:
小小弟弟
时间:
2017-9-23 15:44
可以啊
作者:
GUOXUAN
时间:
2017-11-26 21:46
这个H桥驱动与MCU供电是分开的,还用上了光耦隔离,比较靠普!
作者:
GUOXUAN
时间:
2017-11-26 21:49
正反转转,启动,停止,加速,减速.功能算是比较完善啦,还可以在H桥下端接一个电流取样电阻,产生压降电压给到MCU,输出过流保护功能.
作者:
mlo
时间:
2018-4-12 11:22
很好 谢谢
作者:
lijun1025
时间:
2018-5-20 22:39
顶一下 谢谢分享
作者:
139584
时间:
2018-11-30 19:57
弱弱问一句P2=0;是什么意思?
欢迎光临 (http://www.51hei.com/bbs/)
Powered by Discuz! X3.1



 编译不了
编译不了