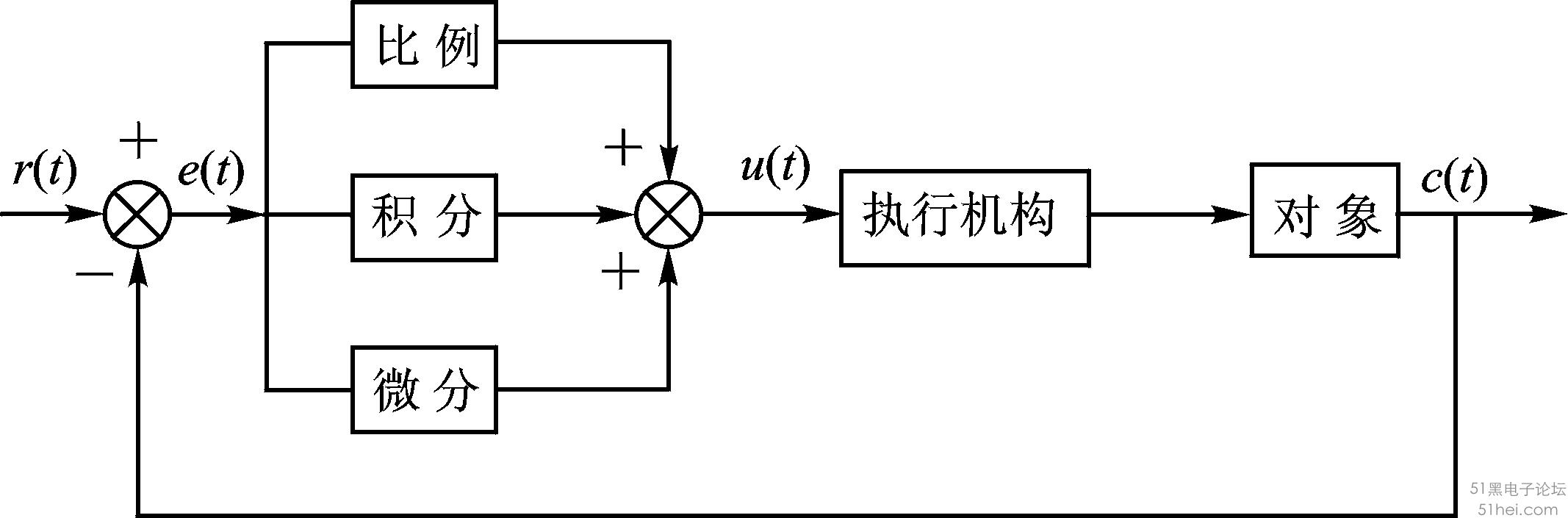
所谓PID指的是Proportion-Integral-Differential。翻译成中文是比例-积分-微分。
记住两句话:
记住两句话:
1、PID是经典控制(使用年代久远) 2、PID是误差控制()
对直流电机速度进行定速控制:
1、L293作为电机驱动;2、光电传感器-作为输出反馈;3、PWM做为输入控制。 PID怎么对误差控制,听我细细道来:
所谓“误差”就是命令与输出的差值。比如你希望控制转速为4转/s(PWM波占空比=80%),而事实上控制转速只有3.5转/s,则误差: e=0.5转,如果实际转速为4.5转,则误差e=-0.5转(注意正负号)。
该误差值送到PID控制器,作为PID控制器的输入。PID控制器的输出为:误差乘比例系数Kp+Ki*误差积分+Kd*误差微分。
Kp*e + Ki*∫edt + Kd*(de/dt) (式中的t为时间,即对时间积分、微分) 上式为三项求和(希望你能看懂),PID结果后送入电机驱动器。 从上式看出,如果没有误差,即e=0,则Kp*e=0;Kd*(de/dt)=0;而Ki*∫edt 不一定为0。三项之和不一定为0。
总之,如果“误差”存在,PID就会对电机驱动作调整,直到误差=0。 评价一个控制系统是否优越,有三个指标:快、稳、准。
所谓快,就是要使压力能快速地达到“命令值”(不知道你的系统要求多少时间) 所谓稳,就是要压力稳定不波动或波动量小(不知道你的系统允许多大波动) 所谓准,就是要求“命令值”与“输出值”之间的误差e小(不知道你的系统允许多大误差)
对于你的系统来说,要求“快”的话,可以增大Kp、Ki值 要求“准”的话,可以增大Ki值
要求“稳”的话,可以增大Kd值,可以减少压力波动 仔细分析可以得知:这三个指标是相互矛盾的。 如果太“快”,可能导致不“稳”; 如果太“稳”,可能导致不“快”;
只要系统稳定且存在积分Ki,该系统在静态是没有误差的(会存在动态误差); 所谓动态误差,指当“命令值”不为恒值时,“输出值”跟不上“命令值”而存在的误差。不管是谁设计的、再好的系统都存在动态误差,动态误差体现的是系统的跟踪特性,比如说,有的音响功放对高频声音不敏感,就说明功放跟踪性能不好。 调整PID参数有两种方法:1、仿真法;2、“试凑法” 仿真法我想你是不会的,介绍一下“试凑法” “试凑法”设置PID参数的建议步骤:
1、把Ki与Kd设为0,不要积分与微分;
2、把Kp值从0开始慢慢增大,观察压力的反应速度是否在你的要求内; 3、当压力的反应速度达到你的要求,停止增大Kp值; 4、在该Kp值的基础上减少10%; 5、把Ki值从0开始慢慢增大;
6、当压力开始波动,停止增大Ki值;
7、在该Ki值的基础上减少10%;
8、把Kd值从0开始慢慢增大,观察压力的反应速度是否在你的要求内
//======================================================================P、I、D参数整定口诀: 参数整定找最佳,从小到大顺序查;
先是比例后积分,最后再把微分加;
曲线振荡很频繁,比例度盘要放大;
曲线漂浮绕大湾,比例度盘往小扳;
曲线偏离回复慢,积分时间往下降;
曲线波动周期长,积分时间再加长;
曲线振荡频率快,先把微分降下来;
动差大来波动慢,微分时间应加长。
这是我在STM32F103RB上做速度PID的PID函数,当然也可以利用ST公司自带的DSP库,//Adjust these three factor ,to achieve the best control effect
//P:1~10之间 I:0-5之间 D:0.1~1
float P_Coefficient=4.75;
float I_Coefficient=0.55;
float D_Coefficient=0.2;
#define Diff_Order 4 /* Differential order*/
int Temp,DestTemp,HeatPower;
int Set_Distant;
long int Integral=5; // Points accumulated
float Prev_Error[10]; // Record ten times before the error
float P,I,D;
float Ek,E;
unsigned char FirstFlag=1;
/*******************************************************************************
* Funtion name:PID Control
* Time:2013/3/5
* Author:zhuhao
*******************************************************************************/
float PID_Control(float Error)
{
int i;
float Output;
float Ture;
if(FirstFlag)//The first execution
{
FirstFlag=0;
for(i=0;i<10;i++)
Prev_Error=Error;
}
for(i=0;i<10;i++)
Prev_Error[i+1]=Prev_Error;// Buffer queue
Prev_Error[0]=Error;//
Ek=Error-Prev_Error[Diff_Order];//
E=0.8+Ek*0.2;//IIR
P=P_Coefficient*Error;// Calculate the proportional component
I=I_Coefficient*Integral;// Calculate the integral component
D=D_Coefficient*E;//Calculate the derivative component
Output=(P+I+D);
if(Output>0)
{
Ture=Output;
}
if(Output>=100||Output<=0||Error<-40||Error>40)//Saturated or large deviation integral
{
if(Integral>0&&Error<0)
Integral+=Error;
if(Integral<0&&Error>0)
Integral+=Error;
}
else
Integral+=Error;
if(Integral<-10) Integral=-10;
if(Integral>10) Integral=10;
if (Output>=100)
Output=99;
else if(Output<=0)
Output=Ture;
return Output;
}
经过试验发现通过PID函数的调节,设定转速与实际转速相差无几,一般在0;01~0.05转左右,抗干扰好

串口数据波形分析仪软件可以到51黑搜索
经过试验发现通过PID函数的调节,设定转速与实际转速相差无几,一般在0;01~0.05转左右,抗干扰好
串口数据波形分析仪软件可以到51黑搜索