标题: STM32之串口通信 [打印本页]
作者: 51黑tt 时间: 2016-3-4 20:13
标题: STM32之串口通信
实验目的:
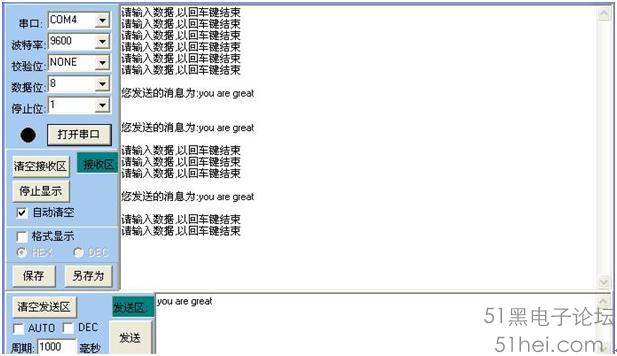
实现利用串口1不停的打印一个信息到电脑上,同时接收从串口发过来的数据,把发送过来的数据直接送回给电脑。
实验平台:
基于STM32F103C8T6的彩屏开发板
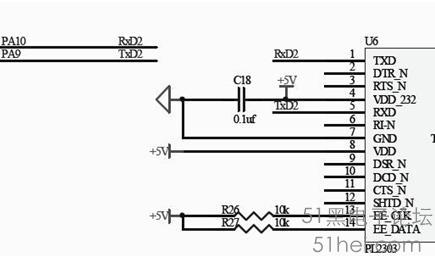
硬件接口:
注意:因为我的开发板上的串口和LED共用了PA9和PA10,所以在使用USART1时务必屏蔽LED,不然两者会互相影响而导致实现现象无法呈现。
相关寄存器:
1,串口时钟使能。串口作为STM32 的一个外设,其时钟由外设时钟使能寄存器控制,这
里我们使用的串口1 是在APB2ENR 寄存器的第14 位。
2,串口复位。串口1 的复位是通过配置APB2RSTR 寄存器的第14位来实现的。。通过向该位写1来复位串口1,写0 结束复位。
3,串口波特率设置。每个串口都有一个自己独立的波特率寄存器USART_BRR
波特率的计算,STM32 的串口波特率计算公式如下:
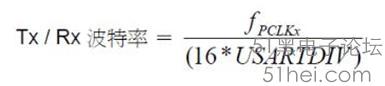
上式中, 是给串口的时钟(PCLK1 用于USART2、3、4、5,PCLK2 用于USART1);USARTDIV是一个无符号定点数。我们只要得到USARTDIV 的值,就可以得到串口波特率寄存器USART1->BRR的值。
4,串口控制。STM32 的每个串口都有3 个控制寄存器USART_CR1~3,串口的很多配置
都是通过这3 个寄存器来设置的
5,数据发送与接收。STM32 的发送与接收是通过数据寄存器USART_DR 来实现的,这是
一个双寄存器,包含了TDR 和RDR。
6,串口状态。串口的状态可以通过状态寄存器USART_SR 读取。
(注:详细的介绍使用请参考ST公司的数据手册)
程序设计:
(注:本人的usart.c usart.h delay.cdelay.h sys.c sys.h是引用网上一位网友整理的)
usart.h
#ifndef __USART_H
#define __USART_H
#include<stm32f10x_lib.h>
#include"stdio.h"
extern u8USART_RX_BUF[64]; //接收缓冲,最大63个字节.末字节为换行符
extern u8USART_RX_STA; //接收状态标记
//如果想串口中断接收,请不要注释以下宏定义
#define EN_USART1_RX //使能串口1接收
void uart_init(u32 pclk2,u32 bound);
#endif
usart.c
#include "sys.h"
#include "usart.h"
//加入以下代码,支持printf函数,而不需要选择useMicroLIB
#if 1
#pragmaimport(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{
int handle;
};
FILE__stdout;
//定义_sys_exit()以避免使用半主机模式
_sys_exit(int x)
{
x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f)
{
while((USART1->SR&0X40)==0);//循环发送,直到发送完毕
USART1->DR = (u8)ch;
return ch;
}
#endif
//end
//////////////////////////////////////////////////////////////////
#ifdefEN_USART1_RX //如果使能了接收
//串口1中断服务程序
//注意,读取USARTx->SR能避免莫名其妙的错误
u8USART_RX_BUF[64]; //接收缓冲,最大64个字节.
//接收状态
//bit7,接收完成标志
//bit6,接收到0x0d
//bit5~0,接收到的有效字节数目
u8USART_RX_STA=0; //接收状态标记
void USART1_IRQHandler(void)
{
u8 res;
if(USART1->SR&(1<<5))//接收到数据
{
res=USART1->DR;
if((USART_RX_STA&0x80)==0)//接收未完成
{
if(USART_RX_STA&0x40)//接收到了0x0d
{
if(res!=0x0a)
USART_RX_STA=0;//接收错误,重新开始
else
USART_RX_STA|=0x80; //接收完成了
}else //还没收到0X0D
{
if(res==0x0d)
USART_RX_STA|=0x40;
else
{
USART_RX_BUF[USART_RX_STA&0X3F]=res;
USART_RX_STA++;
if(USART_RX_STA>63)USART_RX_STA=0;//接收数据错误,重新开始接收
}
}
}
}
}
#endif
//该函数的重点就是判断接收是否完成,通过检测是否收到0X0D、0X0A 的连续2 个字节//(0X0D 后跟0X0A表示回车键)来检测是否结束。当检测到这个结束序列之后,就会置//位USART_RX_STA的最高为来标记已经收到了一次数据。之后等待外部函数清空该位//之后才开始第二次接收。所接收的数据全部存放在USART_RX_BUF里面,一次接收数//据不能超过64个字节,否则被丢弃。
//初始化IO 串口1
//pclk2:PCLK2时钟频率(Mhz)
//bound:波特率
//CHECK OK
//091209
void uart_init(u32 pclk2,u32 bound)
{
float temp;
u16 mantissa;
u16fraction;
temp=(float)(pclk2*1000000)/(bound*16);//得到USARTDIV
mantissa=temp; //得到整数部分
fraction=(temp-mantissa)*16;//得到小数部分
mantissa<<=4;
mantissa+=fraction;
RCC->APB2ENR|=1<<2; //使能PORTA口时钟
RCC->APB2ENR|=1<<14; //使能串口时钟
GPIOA->CRH&=0XFFFFF00F;
GPIOA->CRH|=0X000008B0;//IO状态设置
RCC->APB2RSTR|=1<<14; //复位串口1
RCC->APB2RSTR&=~(1<<14);//停止复位
//波特率设置
USART1->BRR=mantissa; // 波特率设置
USART1->CR1|=0X200C; //1位停止,无校验位.
#ifdefEN_USART1_RX //如果使能了接收
//使能接收中断
USART1->CR1|=1<<8; //PE中断使能
USART1->CR1|=1<<5; //接收缓冲区非空中断使能
MY_NVIC_Init(3,3,USART1_IRQChannel,2);//组2,最低优先级
#endif
}
主函数
#include<stm32f10x_lib.h>
#include"common.h"
int main(void)
{
u8 t;
u8 len;
u16times=0;
Stm32_Clock_Init(9);//系统时钟设置
delay_init(72); //延时初始化
uart_init(72,9600);//串口初始化为9600
while(1)
{
if(USART_RX_STA&0x80)
{
len=USART_RX_STA&0x3f;//得到此次接收到的数据长度
printf("\n您发送的消息为:\n");
for(t=0;t<len;t++)
{
USART1->DR=USART_RX_BUF[t];
while((USART1->SR&0X40)==0);//等待发送结束
}
printf("\n\n");//插入换行
USART_RX_STA=0;
}else
{
times++;
if(timesP00==0)
{
printf("\n 简单的串口实验\n");
}
if(times 0==0)printf("请输入数据,以回车键结束\n");
delay_ms(10);
}
}
}
实验现象:
| 欢迎光临 (http://www.51hei.com/bbs/) |
Powered by Discuz! X3.1 |