式中,N是可能情况下的最小正整数。这一形式表明闭环系统的脉冲响应在N个采样周期后变为零,从而意味着系统在N拍之内达到稳态。但是最小拍控制器有其局限性:1、最小拍控制器对典型输入的适应性较差。一种典型的最小拍闭环脉冲传递函数 2、最小拍控制器的可实现性问题。对于某些对象的脉冲传递函数,所设计的闭环脉冲传递函数,系统的响应超前于被控对象的输入,这在实际中是实现不了的。3、最小拍控制的稳定性问题。在选择时必须有一个约束条件的零点和不稳定极点能够完全对消。
学生姓名 | 黄发义 | |||
课程名称 | 最小拍控制系统 | 专业班级 | 14自动化三班 | |
地 点 | 巡天408 | 起止时间 | 2017.06.12-2017.06.15 | |
设计内容 | 最小拍控制系统设计 | |||
设计参数 | 最小控制系统设计选择一个被控对象,整定参数后阶跃响应小于10% | |||
设计进度 | 已经完成 | |||
设计成果 |
| |||
参考资料 | 【1】胡寿松 自动控制原理 科学出版社 【2】李元春 计算机控制系统 高等教育出版社 【3】何衍庆等 控制系统分析、设计和应用 化学工业出版社
| |||
说明 | 1.本表应在每次实施前由指导教师填写一式2份,审批后所在系(部)和指导教师各留1份。2.多名学生共用一题的,在设计内容、参数、要求等方面应有所区别。3.若填写内容较多可另纸附后。 | |||
系(部)分管领导: 教研室主任: 指导教师:
采用零阶保持器的单位反馈离散系统,被控对象为![]() ,如下图所示,其中
,如下图所示,其中![]() 为零阶保持器,
为零阶保持器,![]() 为被控对象,
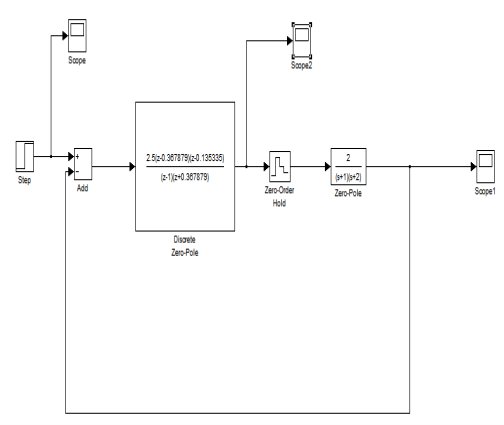
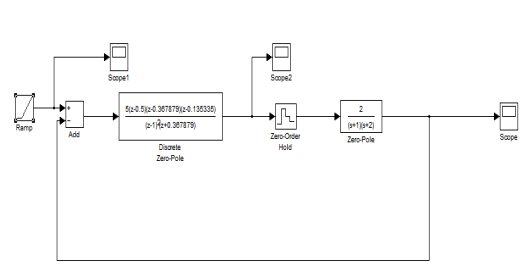
为被控对象,![]() 即为待设计的最少拍控制器。设计实现最小拍控制的simulink仿真模型,要求按照单位阶跃输入和单位速度输入设计最小拍控制器,观察其输出曲线,整定参数后,系统阶跃响应超调<10%并且分析最小拍控制器设计的特点。
即为待设计的最少拍控制器。设计实现最小拍控制的simulink仿真模型,要求按照单位阶跃输入和单位速度输入设计最小拍控制器,观察其输出曲线,整定参数后,系统阶跃响应超调<10%并且分析最小拍控制器设计的特点。

最少拍系统框图
2.2 被控对象稳定且不包含纯滞后环节的最少拍控制器设计
图1 最少拍随动系统框图
定义广义被控对象的脉冲传递函数为
![]()
闭环脉冲传递函数为
![]() (1)
(1)
误差脉冲传递函数
![]() (2)
(2)
数字控制器
![]() (3)
(3)
根据式(2)知
![]() (4)
(4)
将其展开成如下形式:
 (5)
(5)
常见的典型输入信号有:
单位阶跃输入 ![]()
单位速度输入 ![]()
单位加速度输入 ![]()
……
一般地,典型输入信号的z变换具有如下形式:
![]() (6)
(6)
式中,A(z-1)是不包含(1-z-1)因式的z-1的多项式。
将式(6)代入式(4),得到
![]() (7)
(7)
因此,从准确性要求来看,为使系统对式(6.6)的典型输入信号无稳态误差,Φe(z)应具有的一般形式为:
![]() (8)
(8)
式中,F(z-1)是不含(1-z-1)因式的z-1的有限多项式。根据最少拍控制器的设计原则,要使E(z)中关于z-1的项数最少,应该选择合适的Φe(z),即选择合适的p及F(z-1) ,一般取F(z-1)=1,p=m。式(8)及式(3)是设计最少拍控制系统的一般公式。
在不同典型输入下,数字控制器的形式不同。
(1) 单位阶跃输入r(t)=1(t)
![]()
为使E(z)项数最少,选择p=1,F(z-1)=1,即Φe(z)=1-z-1,则
![]()
由z变换定义可知e(t)为单位脉冲函数,即
![]()
也就是说,系统经过1拍,输出就可以无静差地跟踪上输入信号,此时系统的调节时间ts=T,T为系统采样时间。
(2) 单位速度输入r(t)=t
![]()
由式(8)易知,选择p=2, F(z-1)=1, 即Φe(z)=(1-z-1)2,则:
![]()
则e(0)=0,e(T)=T,e(2T)=e(3T)=e(4T)=…=0,即系统经过2拍,输出无静差地跟踪上输入信号,系统的调节时间ts=2T。
(3) 单位加速度输入r(t)=t2/2
![]()
由式(7)可知,选择p=3,F(z-1)=1,即φe(z)=(1-z-1)3,可使E(z)有最简形式:
![]()
则e(0)=0, ![]() ,
,![]() ,e(3T)=e(4T)=…=0,即经过3拍,系统的输出可以无静差地跟踪上输入,即系统调节时间ts=3T。
,e(3T)=e(4T)=…=0,即经过3拍,系统的输出可以无静差地跟踪上输入,即系统调节时间ts=3T。
由上面讨论可以看出,在进行最少拍控制器设计时,误差脉冲传递函数Φe(z)的选取与输入信号的形式密切相关,对于不同的输入信号r(t),所要求的误差脉冲传递函数Φe(z)不同。所以这样设计出的控制器对各种典型输入信号的适应能力较差。若运行时的输入信号与设计时的输入信号形式不一致,将得不到期望的最佳性能。
表1 三种典型输入信号形式下的最少拍控制器设计结果
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3.1 广义脉冲传递函数的求取
根据设计任务要求,设广义被控对象的传递函数为

3.2.1单位阶跃信号



3.2.2单位速度信号




| 欢迎光临 (http://www.51hei.com/bbs/) | Powered by Discuz! X3.1 |
