ИИГЕЈә 51өҘЖ¬»ъ | 24РЎКұұШҙрЗш | өҘЖ¬»ъҪМіМ | өҘЖ¬»ъDIYЦЖЧч | STM32 | Cortex M3 | ДЈКэөзЧУ | өзЧУDIYЦЖЧч | ТфПм/№Ұ·Е | Ір»ъАЦФ° | Arduino | З¶ИлКҪOS | іМРтЙијЖ
ИИГЕЈә 51өҘЖ¬»ъ | 24РЎКұұШҙрЗш | өҘЖ¬»ъҪМіМ | өҘЖ¬»ъDIYЦЖЧч | STM32 | Cortex M3 | ДЈКэөзЧУ | өзЧУDIYЦЖЧч | ТфПм/№Ұ·Е | Ір»ъАЦФ° | Arduino | З¶ИлКҪOS | іМРтЙијЖ
|
КҰёөЈ¬ДгөДөзВ·НјФхГҙ»ӯөДЈҝЎ·әГЖҜББ |
| ҫУИ»УГөДКЗ »гұаУпСФ Ј¬ХжөДЗҝ°ЎЎЈЛіҙшТ»ОКЈ¬»гұаәНCУпСФДЗёцёьәГЈЁС§БЛCЦ®әуЦ»»бУГCЈ¬ҝҙРиІ»РиТӘПВ№Ұ·тәГәГС§»гұаЈ© |
|
ЧтМм°СЧӘПтёДОӘөг¶Ҝ ІўҫАХэБЛҪУКХәмНвБ¬ВлКұөДҙнОу ҙъВлФЭКұІ»·ўБЛ УРРиТӘөДМіУСҝЙТФәНОТБӘПө |
| 666666666666666666666666666666666666666 |
|
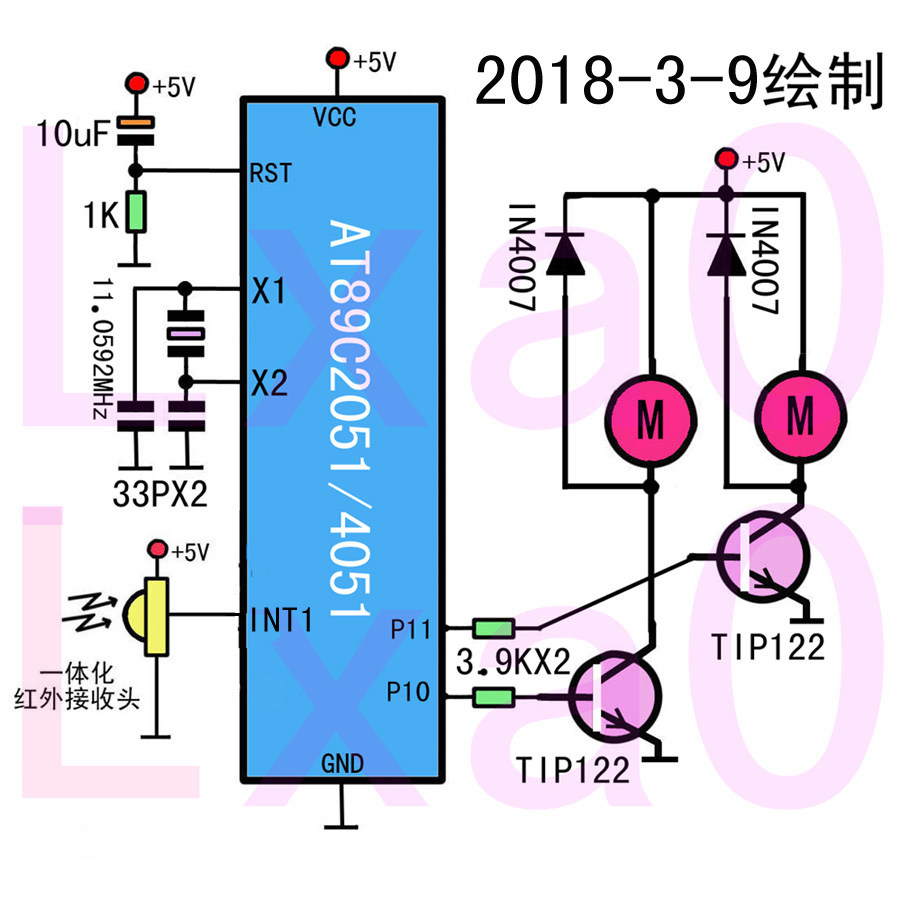
ІОҝјФӯҙъВлЈә Ҫц№©ІОҝј І»өГУГУЪЙМТөЈЎ ОҘХЯұШҫҝЈЎ ;КФСйәмНвТЈҝШРЎіө»гұаҙъВл ;2018-3-8НнРЮёДНкіЙ ;at89c2051--11.0592MHzҫ§Хс ;p17Улp10·ЦұрЗэ¶ҜЧуУТөз»ъ,p37Зэ¶ҜledөЖ org 0000h ajmp mm org 0013h ajmp tt1 ;ЦчіМРт********************************************************* org 0100h mm:nop mov p1,#00h mov p1,#00h mov th1,#00h mov tl1,#00h mov tmod,#90h ;T0Йи·ҪКҪ0,T1·ҪКҪ1ІўҙтҝӘГЕҝШ mov tcon,#04h ;T1УЙНвІҝПВҪөСШҙҘ·ўЦР¶П mov ie,#84h ;ҝӘINT1әНЧЬЦР¶П mov ip,#04h ;INT1НвІҝЦР¶ПУЕПИ mov sp,#4fh ;Йи¶СХ»ИлҝЪ mov 08h,#38h ;ҝӘКјЧӘ»»әмНвІЁН· mov 09h,#07h ;ЧӘ»»8О»Т»ЧйІЁН· mov 10h,#30h ;¶БәмНвІЁН·ҙж·ЕКЧЦ· mov 11h,#10h ;¶БәмНвІЁН·16ёц mov 20h,#00h ;ЛщУРұкЦҫО» mov 21h,#00h ;ҙж·Е¶ҜЧчЦёБоВл clr p3.7 m0:acall zh acall dz acall ccc sjmp m0 ;cc¶ҜЧчНкіЙәу»ЦёҙПа№ШөДјДҙжЖч<І»ХјЗш>****************************** ccc:jnb 07h,ccc0 mov 30h,#00h mov 31h,#00h mov 32h,#00h mov 33h,#00h mov 34h,#00h mov 35h,#00h mov 36h,#00h mov 37h,#00h mov 38h,#00h mov 39h,#00h mov 3ah,#00h mov 3bh,#00h mov 3ch,#00h mov 3dh,#00h mov 3eh,#00h mov 3fh,#00h mov 20h,#00h ;И»әу»ЦёҙПа№ШөҘФӘ mov 21h,#00h setb ex1 ;И«Іҝ¶ҜЧчНкіЙЧоәуҝӘINT1ЦР¶П ccc0:ret ;tt1 T1¶БәмНвҙъВлЧУіМРт<ХјУГЗш2>******************************** org 0200h tt1:push dph ;ұЈ»ӨПЦіЎ push dpl push acc push psw jb 01h,t3 ;ИфХэФЪЧӘ»»Фт·ө»Ш jb 02h,t3 ;ИфХэФЪ¶ҜЧчФт·ө»Ш jb 00h,t2 ;КХөҪТЈҝШТэөјВлФтҪшИлҪУКХК¶ұрДЈКҪ mov th1,#00h ;ЗеT1,ОӘҪУКХЧцЧјұё mov tl1,#00h setb 00h ;ЙиҪУКХТЈҝШІЁН·ЧјұёәГұкЦҫО» setb tr1 ;Жф¶ҜT1 sjmp t3 t2:setb psw.4 ;ҪшИлЗш2 clr psw.3 mov @r0,th1 ;ҙУ30hҙж·Е¶БҪшөДәмНвІЁН· mov th1,#00h ;ЗеT1,Чјұё¶БПВТ»О» mov tl1,#00h inc r0 djnz r1,t3 ;ҪУКХ0fhёцәмНвІЁН·НкіЙ·сЈҝ mov 10h,#30h ;ҙж·ЕІЁН·КЧөШЦ· mov 11h,#10h ;ҙж·ЕІЁН·КэБҝ setb 01h ;Йи¶БИЎНкіЙУлФКРнЧӘ»»ұкЦҫО» clr tr1 ;№ШT1 clr ex1 ;№ШНвІҝЦР¶П1 clr 00h ;»ЦёҙҪУКХұкЦВО» t3:pop psw pop acc pop dpl pop dph reti ;zhЧӘ»»ЧУіМРт<ХјУГЗш1>****************************************** org 0280h zh:push dph ;Ҫ«К¶ұрәуөДТЈҝШРЕәЕЧӘ»»іЙ16О»¶ҜЧчҙъВл push dpl push acc push psw setb psw.3 ;ҪшИлЗш1 clr psw.4 jb 00h,h01 ;ИфХэФЪҪУКХФт·ө»Ш jb 02h,h01 ;ИфХэФЪ¶ҜЧчФт·ө»Ш jb 01h,h02 ;ИфФКРнЧӘ»»ФтјМРш h01:mov 08h,#38h mov 09h,#07h pop psw pop acc pop dpl pop dph ret h02:mov a,30h jnb acc.2,h01 ;ТФПВ8МхКЗЕРұрәмНвЦёБоөДөШЦ·ВлКЗ·сХэИ· mov a,31h ;ХэИ·КұУҰОӘHHHL LLHL(11100010B) jnb acc.2,h01 mov a,32h jnb acc.2,h01 mov a,36h jnb acc.2,h01 mov a,33h jnb acc.1,h01 mov a,34h jnb acc.1,h01 mov a,35h jnb acc.1,h01 mov a,37h jnb acc.1,h01 mov 08h,#38h ;ҙУ38hөҘФӘҝӘКјЧӘ»»ЦёБоВл h03:mov a,@r0 ;өШЦ·ВлХэИ·ҝӘКјЧӘ»»ЦёБоВл jb acc.2,h04 clr 08h ;21hөДЧоөНО»ЦГ0 sjmp h05 h04: setb 08h ;21hөДЧоөНО»ЦГ1 h05: mov a,21h rl a mov 21h,a inc 08h djnz r1,h03 ;8О»ЦёБоВлЧӘ»»Нк·сЈҝ setb 02h ;ЙиЦГФКРнЦҙРР¶ҜЧчұкЦҫО» clr 01h ;ЗеіэФКРнЧӘ»»ұкЦҫО» ljmp h01 ;dz¶ҜЧчЧУіМРт<І»ХјЗш>********************************************** org 0300h dz:push dph push dpl push acc push psw jb 00h,d01 ;ИфХэФЪҪУКХФт·ө»Ш jb 01h,d01 ;ИфХэФЪЧӘ»»Фт·ө»Ш jnb 02h,d01 ;ФКРн¶ҜЧч·с? mov a,21h cjne a,#50h,dz2 ;ЧуЧӘ? mov p1,#00h nop setb p1.7 nop sjmp d00a dz2:mov a,21h ;УТЧӘЈҝ cjne a,#48h,dz3 mov p1,#00h nop setb p1.0 nop sjmp d00a dz3:mov a,21h ;З°Ҫш? cjne a,#44h,dz4 mov p1,#00h nop mov p1,#0ffh nop sjmp d00a dz4:mov a,21h cjne a,#54h,d00a ;НЈЦ№Јҝ mov p1,#00h mov p1,#00h d00a:nop mov 20h,#00h ;ЗеіэИ«ІҝұкЦҫ mov 21h,#00h ;ЗеіэТСНкіЙөД¶ҜЧчҙъВл setb 07h ;ұҫҙО¶ҜЧчНкіЙәуЙиЦГұкЦҫ d01:pop psw pop acc pop dpl pop dph ret end |
РЎәЪОЭ|51әЪөзЧУВЫМі
|
 №ЬАнФұQQ:125739409;јјКхҪ»БчQQИә281945664
№ЬАнФұQQ:125739409;јјКхҪ»БчQQИә281945664
Powered by өҘЖ¬»ъҪМіМНш

 КХІШ
КХІШ ¶Ҙ
¶Ҙ ІИ
ІИ