sxhwdz 发表于 2018-9-28 07:22 谢谢 这个问题解决了 |
|
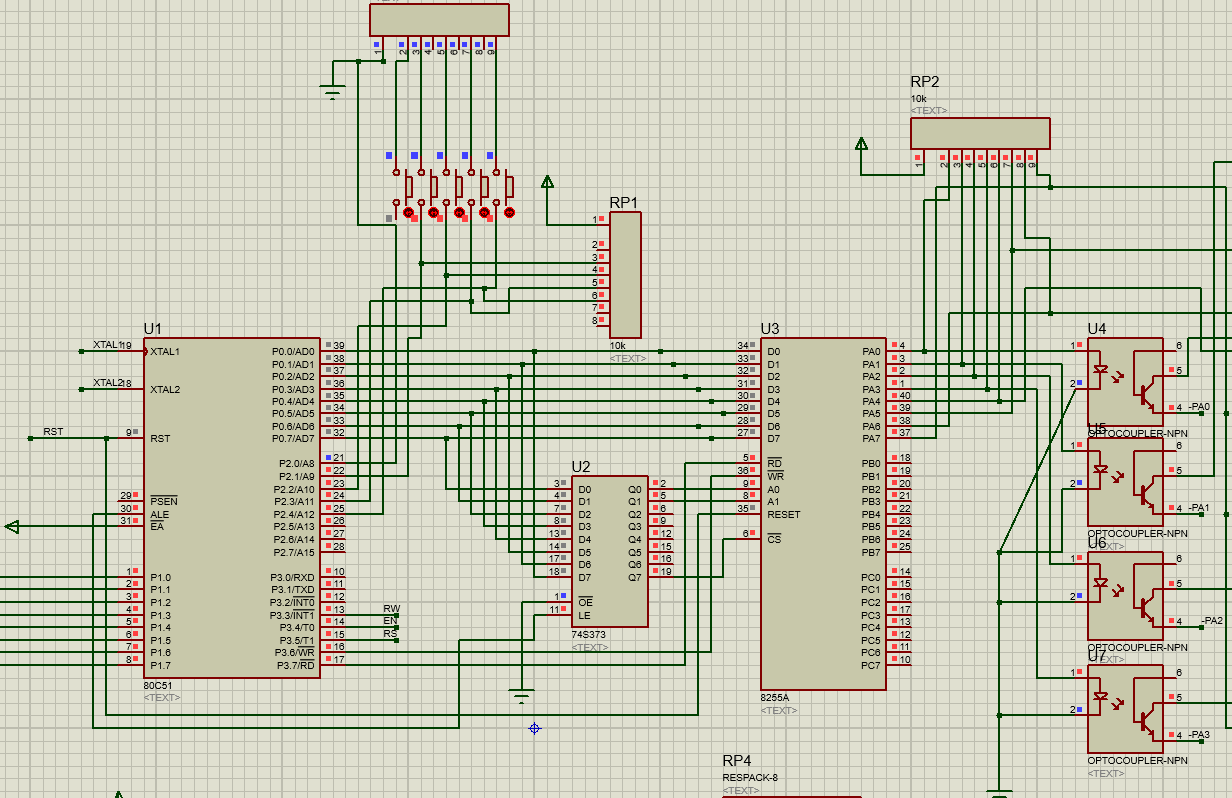
地址锁存器74S373的输入端顺序接反了,CPU的 P0.0~P0.7 依次连接了 373的 D7~D0,所以8255的地址全错了。把连线换过来,或者把地址定义改一下: #define PA XBYTE[0x0000] #define PB XBYTE[0x0080] #define PC XBYTE[0x0040] #define COM XBYTE[0x000C] 这样也是可以的 |
|
#include<reg51.h> #include<absacc.h> #include<intrins.h> #define uchar unsigned char #define uint unsigned int #define PA XBYTE[0x0000] #define PB XBYTE[0x0001] #define PC XBYTE[0x0002] #define COM XBYTE[0x0003] //PA、PB、PC端口及命令端口地址定义 #define motor1 PA #define motor2 PB sbit RS = P3^5; //液晶引脚定义 sbit RW = P3^3; sbit EN = P3^4; sbit Xqj=P2^0; //电机正转,X轴前进按钮 sbit Yqj=P2^1; //电机正转,Y轴前进按钮 sbit Xht=P2^2; //电机反转,X轴后退按钮 sbit Yht=P2^3; //电机反转,Y轴后退按钮 sbit jiting=P2^4;//急停按钮 sbit dula=P2^6; sbit wela=P2^7; bit flag1=0; //x轴正反转标志位 bit flag2=0; //Y轴正反转标志位 uchar code table[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0xf8,0x80,0x90};//共阳极数码管编码 uchar code a1[]={0xf2,0xfa,0xf8,0xf9,0xf1,0xf5,0xf4,0xf6}; //八拍正转 uchar code a2[]={0xf6,0xf4,0xf5,0xf1,0xf9,0xf8,0xfa,0xf2}; //八拍反转 uchar temp1=0000,temp2=0000,temp3=0000,temp4=0000; void delayms(uchar x)//延时程序 { uchar c,j; for(c=x;c>0;c--) for(j=123;j>0;j--); } /***********LED写入命令函数***********/ void write_com(uchar com) { //while(LCD_Check_Busy()); //忙则等待 RS=0; P1=com; _nop_(); RW=0; EN=1; _nop_(); EN=0; _nop_(); } /**********LED写入数据函数**********/ void write_dat(uchar chr) { //while(LCD_Check_Busy()); //忙则等待 RS=1; P1= chr; _nop_(); RW=0; EN=1; _nop_(); EN=0; _nop_(); } void write_shuzi(uchar dat) { uchar t; t=dat+'0'; //while(LCD_Check_Busy()); //忙则等待 RS=1; RW=0; P1=t; _nop_(); EN=1; _nop_(); EN=0; } void GotoXY(uchar x,uchar y) { if(y==0) //第一行 write_com(0x80|x); //写地址 if(y==1) //第二行 write_com(0x80|(x+0x40)); } /*****LED初始化函数******/ void LCD_Init() { RW=0; dula=0; //关闭数码管显示 wela=0; //关闭数码管显示 write_com(0x38); /*显示模式设置*/ delayms(5); write_com(0x06);/*显示光标移动设置*/ delayms(5); write_com(0x0C); /*显示开及光标设置*/ write_com(0x01); /*显示清屏*/ } void dispose() { uchar a,b,bai1,shi1,ge1,bai2,shi2,ge2; a=(temp1-temp3)/8*75/36*5; b=(temp2-temp4)/8*75/36*5; bai1=a%1000/100; shi1=a%100/10; ge1=a%10; bai2=b%1000/100; shi2=b%100/10; ge2=b%10; write_shuzi(bai1); GotoXY(7,1); write_shuzi(shi1); GotoXY(8,1); write_shuzi(ge1); GotoXY(9,1); write_shuzi(bai2); GotoXY(7,2); write_shuzi(shi2); GotoXY(8,2); write_shuzi(ge2); GotoXY(9,2); write_dat('X'); GotoXY(4,1); write_dat(':'); GotoXY(5,1); write_dat('Y'); GotoXY(4,2); write_dat(':'); GotoXY(5,2); if(a<0) { write_dat('-'); GotoXY(6,1); } if(b<0) { write_dat('-'); GotoXY(6,2); } } void key() { if(Xqj==0) { delayms(5); if(Xqj==0) { flag1=1; while(Xqj==0); } } if(Xht==0) { delayms(5); if(Xht==0) { flag1=~flag1; while(Xht==0); } } if(Yqj==0) { delayms(5); if(Yqj==0) { flag2=1; while(Yqj==0); } } if(Yht==0) { delayms(5); if(Yht==0) { flag2=~flag2; while(Yht==0); } } } void qudong() { if(flag1==1) { uchar i; for(i=0;i<8;i++) { if(jiting==0) {break;} PA=a1[i]; temp1++; } i=0; } if(flag2==1) { uchar j; for(j=0;j<8;j++) { if(jiting==0) {break;} PB=a1[j]; temp2++; } j=0; //八拍正转子程序 } if(flag1==0) { uchar k; for(k=0;k<8;k++) { if(jiting==0) {break;} if(Xht==0) {PA=a2[k];} temp3++; } k=0; } if(flag2==0) { uchar u; for(u=0;u<8;u++) { if(jiting==1) {break;} if(Yht==1) {PB=a2[u];} temp4++; } //八拍反转转子程序 u=0; } } void main() { COM=0x80;//方式0,PA口与PB口均为输出 Xqj=1; Yqj=1; Xht=1; Yht=1; jiting=1; while(1) { key(); dispose(); qudong(); } } 这是程序 |
|
本帖最后由 LonelyLiar 于 2018-9-27 18:25 编辑 还有LCD总是显示busy,无法显示.. |
 收藏
收藏 顶
顶 踩
踩

