| 这个型号的数据手册应该有讲解 |
| 步进电机和伺服电机属于控制型电机,用于需要位置控制的场合。变频电机用于速度控制的场合。 |
| 沙发说的已经很清楚了,步进角是算总数计算出来的,其实不是每步都走一样的角度,是4步共走了45度,可以认为最后一步就没怎么转好了。因此还有8柏走法,就是相当于走一步退半步,这样会走的更精细了。 |
| 我也是一直想不通这个问题,不知道咋回事 |
|
书上写的应该就是错的,当天看就觉的不对,看了好几天了怎么也琢磨不透。 网上一个关于这个的讲解也找不到。。这本书的错别字还多啊,看了楼上的解答不得不相信自己分析的就是对的 |
| 我也觉得奇怪,不懂,两个值不一样,相矛盾,看到了楼上的解答,好认真严谨,赞!!! |
天启 发表于 2020-4-13 14:22 因为实际上这个步进电机的结构比较特殊,并不是上面的那样。可以买一个拆开看 |
二楼发的一堆就是某本书上的,我看到那个地方怎么也想不通,怎么算都是15度,书上说BCDA通电四次转45度,可实际上他的分析中一开始的B通电根本没转,本身就是对齐的,相当于BCDA通四次电只转了三次,算下来还是15度啊,哎百思不得其解啊……请问楼主问题解决了吗? 能否赐教下 |
| 我也在考虑这个问题,以上图为开始,下一个C-D-A-B则为一圈,但步进角度为15的话。只需要C-D-A,3就对齐A了,所以肯定不是15度,但图上计算出的就是15度,很郁闷 |
| 步进电机运行是有步序的,不同的步序对应步距角的不一样的。 |
xuyaqi 发表于 2019-1-25 11:47 这样假设显然是建立在一开始状态如图的情况下啊,如果再推演一个周期呢?继续接通B,1-4就会与B对齐,如果把这个角度考虑进去,那之后的四节拍转动的角度就是60°,而不是一个定子齿距的45°了。 书上好像就是这么讲的吧,我也是看到了有些疑问才提出来的。 |
还真没研究过这问题,不过28byj48减速比太大了,扭力也小,也就只能学习用,不实用 |
|
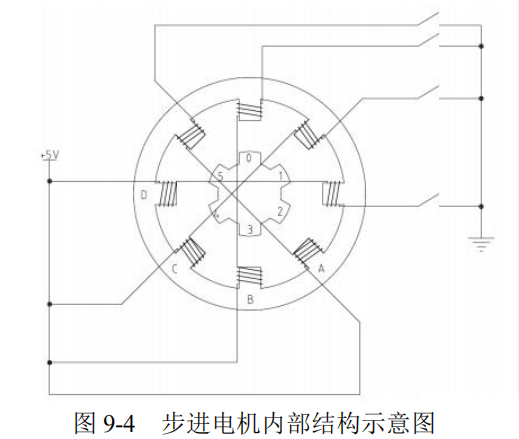
现在我们分析一下它的工作原理: 假定电机的起始状态就如上图所示,起始时是B相绕组的开关闭合,B相绕组导通,那么导通电流就会在正上和正下两个定子齿上产生磁性,这两个定子齿上的磁性就会对转子上的0和3号齿产生最强的吸引力,就会如图所示的那样,转子的的0号齿在正上、3号齿在正下而处于平衡状态;此时我们会发现,转子的1号齿与右上的定子齿也就是C相的一个绕组呈现一个很小的夹角,2号齿与右边的定子齿也就是D相绕组呈现一个稍微大一点的夹角,很明显这个夹角是1号齿和C绕组夹角的2倍,同理,左侧的情况也是一样的。 接下来,我们把B相绕组断开,而使C相绕组导通,那么很明显,右上的定子齿将对转子1号齿产生最大的吸引力,而左下的定子齿将对转子4号齿,产生最大的吸引力,在这个吸引力的作用下,转子1、4号齿将对齐到右上和左下的定子齿上而保持平衡,如此,转子就转过了起始状态时1号齿和C相绕组那个夹角的角度。 再接下来,断开C相绕组,导通D相绕组,过程与上述的情况完全相同,最终将使转子2、5号齿与定子D相绕组对齐,转子又转过了上述同样的角度。 那么很明显,当A相绕组导通,即完成一个B-C-D-A的四节拍操作后,转子的0、3号齿将由原来的对齐到上下2个定子齿,而变为了对齐到左上和右下的两个定子齿上,即转子转过了一个定子齿的角度。依此类推,再来一个四节拍,转子就将再转过一个齿的角度,8个四节拍以后转子将转过完整的一圈,而其中单个节拍使转子转过的角度就很容计算出来了,即360度÷(8×4)=11.25度,这个值就叫做步进角度。而上述这种工作模式就是步进电机的单四拍模式——单相绕组通电四节拍。 |
 收藏
收藏 顶
顶 踩
踩

