| 膜拜大佬。 |
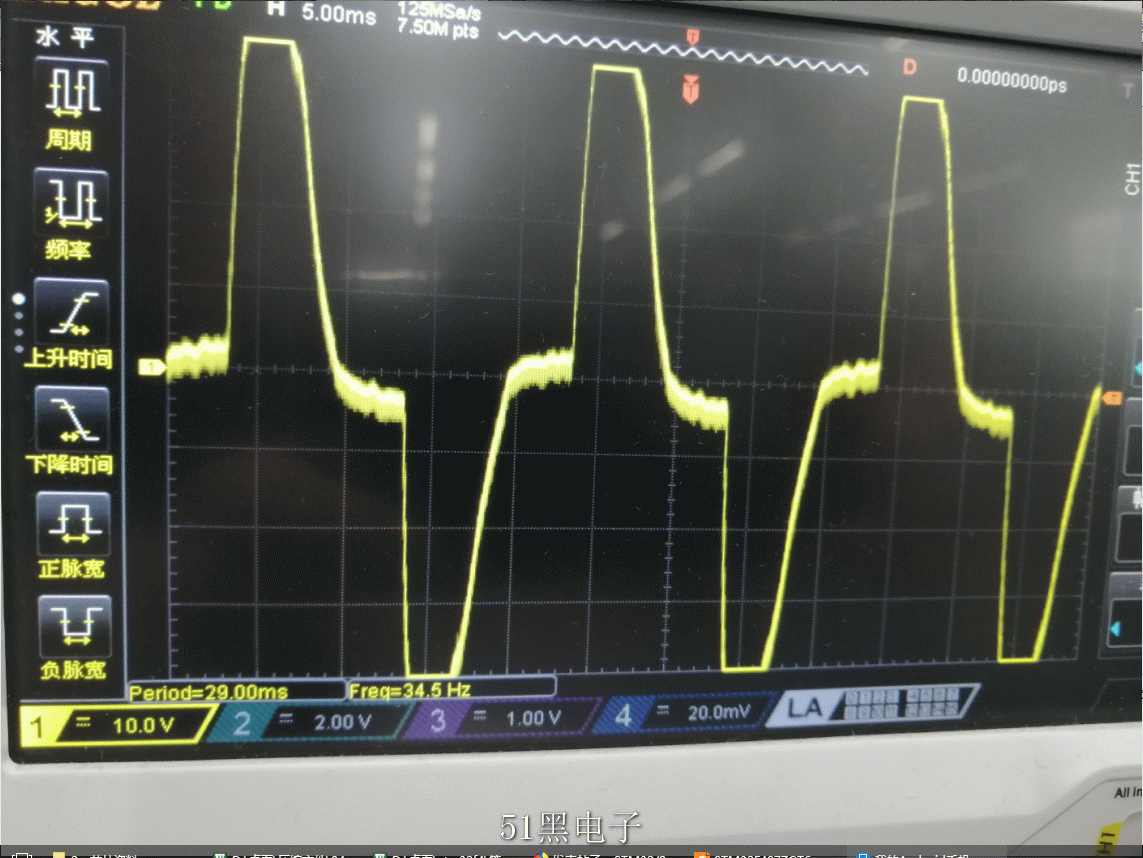
| PWM调速啊 |
|
把TIM_OCInitStructure结构体的所以都参数初始化一下就可以了,结帖了。 谢谢大家的回复 |
zhenfeng_ma 发表于 2019-7-22 16:09 管脚是这样设置的 |
| 相应GPIO管脚的输出设置检查一下,有没有推挽输出 |
| 相应GPIO管脚的输出设置检查一下,有没有推挽输出,还有管脚的速度设置是高速还是低速? |
xujing 发表于 2019-7-22 14:12 void TIM14_PWM_Init(u32 arr,u32 psc) { //´Ë²¿·ÖÐèÊÖ¶¯ÐÞ¸ÄIO¿ÚÉèÖà GPIO_InitTypeDef GPIO_InitStructure; TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_OCInitTypeDef TIM_OCInitStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM14,ENABLE); //TIM14ʱÖÓʹÄÜ RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE); //ʹÄÜPORTFʱÖÓ GPIO_PinAFConfig(GPIOF,GPIO_PinSource9,GPIO_AF_TIM14); //GPIOF9¸´ÓÃΪ¶¨Ê±Æ÷14 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //GPIOF9 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //¸´Óù¦ÄÜ GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //ËÙ¶È100MHz GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //ÍÆÍ츴ÓÃÊä³ö GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //ÉÏÀ GPIO_Init(GPIOF,&GPIO_InitStructure); //³õʼ»¯PF9 TIM_TimeBaseStructure.TIM_Prescaler=psc; //¶¨Ê±Æ÷·ÖƵ TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; //ÏòÉϼÆÊýģʽ TIM_TimeBaseStructure.TIM_Period=arr; //×Ô¶¯ÖØ×°ÔØÖµ TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1; TIM_TimeBaseInit(TIM14,&TIM_TimeBaseStructure);//³õʼ»¯¶¨Ê±Æ÷14 //³õʼ»¯TIM14 Channel1 PWMģʽ TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //Ñ¡Ôñ¶¨Ê±Æ÷ģʽ:TIMÂö³å¿í¶Èµ÷ÖÆģʽ2 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //±È½ÏÊä³öʹÄÜ TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //Êä³ö¼«ÐÔ:TIMÊä³ö±È½Ï¼«ÐÔµÍ TIM_OC1Init(TIM14, &TIM_OCInitStructure); //¸ù¾ÝTÖ¸¶¨µÄ²ÎÊý³õʼ»¯ÍâÉèTIM1 4OC1 TIM_OC1PreloadConfig(TIM14, TIM_OCPreload_Enable); //ʹÄÜTIM14ÔÚCCR1ÉϵÄԤװÔؼĴæÆ÷ TIM_ARRPreloadConfig(TIM14,ENABLE);//ARPEʹÄÜ TIM_Cmd(TIM14, ENABLE); //ʹÄÜTIM14 } |
| 采用PWM进行调速 |
xujing 发表于 2019-7-22 14:12 void TIM14_PWM_Init(u32 arr,u32 psc) { GPIO_InitTypeDef GPIO_InitStructure; TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_OCInitTypeDef TIM_OCInitStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM14,ENABLE); //TIM14ʱÖÓʹÄÜ RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE); //ʹÄÜPORTFʱÖÓ GPIO_PinAFConfig(GPIOF,GPIO_PinSource9,GPIO_AF_TIM14); //GPIOF9¸´ÓÃΪ¶¨Ê±Æ÷14 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //GPIOF9 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //¸´Óù¦ÄÜ GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //ËÙ¶È100MHz GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //ÍÆÍ츴ÓÃÊä³ö GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //ÉÏÀ GPIO_Init(GPIOF,&GPIO_InitStructure); //³õʼ»¯PF9 TIM_TimeBaseStructure.TIM_Prescaler=psc; //¶¨Ê±Æ÷·ÖƵ TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; //ÏòÉϼÆÊýģʽ TIM_TimeBaseStructure.TIM_Period=arr; //×Ô¶¯ÖØ×°ÔØÖµ TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1; TIM_TimeBaseInit(TIM14,&TIM_TimeBaseStructure);//³õʼ»¯¶¨Ê±Æ÷14 //³õʼ»¯TIM14 Channel1 PWMģʽ TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //Ñ¡Ôñ¶¨Ê±Æ÷ģʽ:TIMÂö³å¿í¶Èµ÷ÖÆģʽ2 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //±È½ÏÊä³öʹÄÜ TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //Êä³ö¼«ÐÔ:TIMÊä³ö±È½Ï¼«ÐÔµÍ TIM_OC1Init(TIM14, &TIM_OCInitStructure); //¸ù¾ÝTÖ¸¶¨µÄ²ÎÊý³õʼ»¯ÍâÉèTIM1 4OC1 TIM_OC1PreloadConfig(TIM14, TIM_OCPreload_Enable); //ʹÄÜTIM14ÔÚCCR1ÉϵÄԤװÔؼĴæÆ÷ TIM_ARRPreloadConfig(TIM14,ENABLE);//ARPEʹÄÜ TIM_CtrlPWMOutputs(TIM14,ENABLE); TIM_Cmd(TIM14, ENABLE); //ʹÄÜTIM14 } TIM14_PWM_Init(1000-1,0); TIM_SetCompare1(TIM14,500); |
| 你把定时器14的pwm设置函数发上来看看,这种情况我也遇到过,后来我把pwm的频率调高了就行了。 |
 收藏
收藏 顶
顶 踩
踩

