| 哪就是超声波显示进入死循环了,可以联调的话加入联调机制,查看一下哪一步走不下去了 |
|
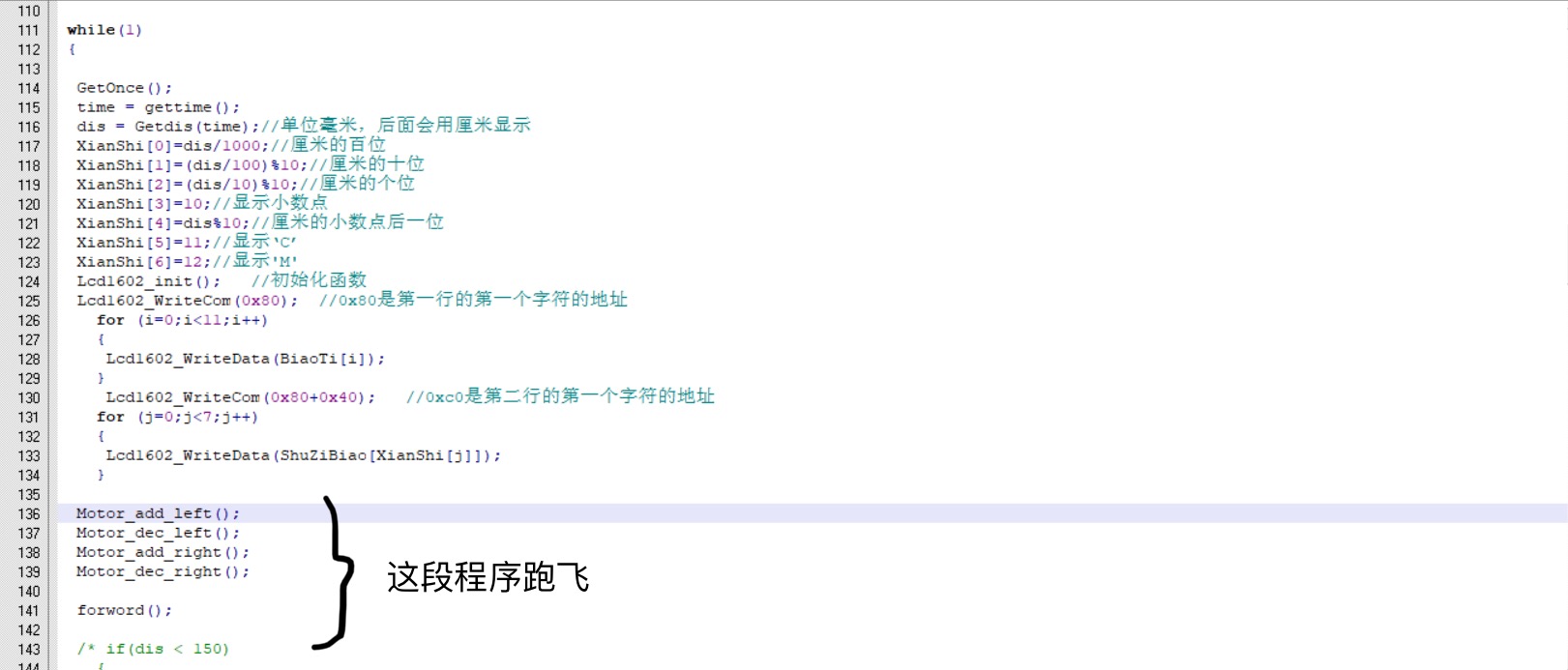
求解决:在显示距离同时可以按键调整小车速度 完整程序如下: #include<reg52.h> #include<1602.h> #include<pwm.h> sfr T2MOD=0XC9; sbit Trig = P2^0; sbit Echo = P2^1; /*void UsartConfiguration(); unsigned char i; */ sbit IN1 = P3^7; sbit IN2 = P3^6; sbit IN3 = P3^5; sbit IN4 = P3^4; /************函数声明**************/ void forword(); void back(); void right(); void left(); void stop(); unsigned char BiaoTi[]=" distance: "; unsigned char code ShuZiBiao[15] = {'0','1','2','3','4','5','6','7','8','9','.','C','M'}; unsigned char XianShi[7] ={ 0,0,0,0,0,0,0}; //2、设定发送时间 void Delay10us() { T2MOD = 0; //---- --00 初始化模式寄存器 默认向上计数 T2CON = 0; //0000 0000 初始化控制寄存器 一个中断源,16位自动重装模式 TL2 = (65536 - 10) / 256; //设置定时初值 TH2 = (65536 - 10) % 256; //设置定时初值 RCAP2L = (65536 - 10) / 256; //设置定时重载值 RCAP2H = (65536 - 10) % 256; //设置定时重载值 TR2 = 1; //定时器2开始计时 IE = 0xA0; //打开全局中断,定时器2中断 while(!TF2); TF2 = 0; /* TMOD |= 0x01; TH0 = 0xFF; TL0 = 0xF6; TR0 = 1; while(!TF0); TF0 = 0; */ } void Rstart() //启动超声波模块,初始化 { Trig=0; Trig=1; Delay10us(); Trig=0; } //3、获取时间和距离 int gettime()//获取时间 { unsigned int time = 0; time = TH2<<8 | TL2; //TH0*256+TL0 return time; } int Getdis(unsigned int time) //获取距离 { unsigned int distance;//整型的原因是方便后续LCD1602屏显示 distance = (int)time * 0.085; TH2=0; TL2=0;//清空计时器· return distance; } void star() { TH2 = 0; TL2 = 0; TR2 = 1; } void end() { TR2 = 0; } void GetOnce() //获取一次超声波测距模块的距离 { Rstart(); while(!Echo);//当Echo为零时等待 star(); while(Echo);//当Echo为1计数并等待 end(); } void delay() { int i; int j; for(i=0;i<50;i++) for(j = 0;j<1000;j++); } void main() { unsigned int time = 0; unsigned int i,j; unsigned int dis; timer0_init(); delayxms(5); /* UsartConfiguration(); //串口初始化 */ while(1) { GetOnce(); time = gettime(); dis = Getdis(time);//单位毫米,后面会用厘米显示 XianShi[0]=dis/1000;//厘米的百位 XianShi[1]=(dis/100)%10;//厘米的十位 XianShi[2]=(dis/10)%10;//厘米的个位 XianShi[3]=10;//显示小数点 XianShi[4]=dis%10;//厘米的小数点后一位 XianShi[5]=11;//显示‘C’ XianShi[6]=12;//显示'M' Lcd1602_init(); //初始化函数 Lcd1602_WriteCom(0x80); //0x80是第一行的第一个字符的地址 for (i=0;i<11;i++) { Lcd1602_WriteData(BiaoTi[i]); } Lcd1602_WriteCom(0x80+0x40); //0xc0是第二行的第一个字符的地址 for (j=0;j<7;j++) { Lcd1602_WriteData(ShuZiBiao[XianShi[j]]); } Motor_add_left(); Motor_dec_left(); Motor_add_right(); Motor_dec_right(); forword(); /* if(dis < 150) { back(); delay(); right(); } else {forword();} */ // 避障 /* i = SBUF; RI = 0; if(i == 'q') { forword(); } if(i == 'h') { back(); } if(i == 'z') { left(); } if(i == 'y') { right(); } if(i == 't') { stop(); } */ } } void forword() //前进函数 { //第一路电机 正转 IN1 = 0; IN2 = 1; //第二路电机 正转 IN3 = 0; IN4 = 1; } void back() //后退 { //第一路电机 反转 IN1 = 1; IN2 = 0; //第二路电机 反转 IN3 = 1; IN4 = 0; } void right() //右转 { // 第一路正转 IN1 = 0; IN2 = 1; // 第二路反转 IN3 = 0; IN4 = 0; } void left() //左拐函数 { IN1 = 1; IN2 = 0; IN3 = 0; IN4 = 1; } void stop() { IN1 = 0; IN2 = 0; IN3 = 0; IN4 = 0; } /***********定时器0初始化***********/ void timer0_init() { TMOD=0x01; //定时器0工作于方式1 TH0=(65536-10)/256; TL0=(65536-10)%256; EA = 1; ET0=1; TR0=1; } /**************定时0中断处理******************/ void timer0_int() interrupt 1 { TH0=(65536-10)/256; TL0=(65536-10)%256; TIME++; m1 = countA; m2 = countB; if(TIME < m1) //count为占空比 { ENA = 1; //输出高电平 } else { ENA = 0; } if(TIME < m2) { ENB = 1; } else { ENB = 0; } if(TIME>=100) { TIME=0; } } |
 收藏
收藏 顶
顶 踩
踩

