|
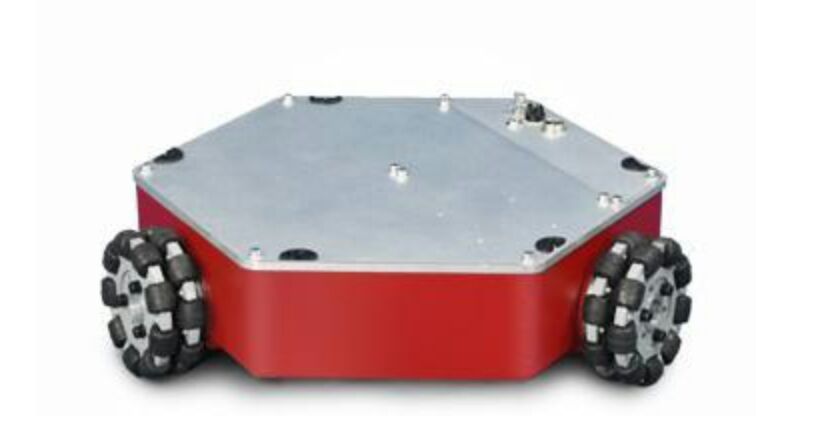
这个叫全向轮…… 先考虑平动情况,在不考虑车身全身旋转的情况下,每个轮子可以分别提供三个在平面上相差120°的驱动矢量。矢量的大小就是车轮的转速,由单片机控制。根据矢量叠加原理,这三个矢量可以合成任何方向的合矢量,这个矢量就是车身运动的速度。也就是说,要让车身以某一个速度(显然这个速度必须在它能达到的最高速度之内)朝着某一个方向前进,就用矢量分解的方法,将目标速度分解为相差120°的三个矢量,三个矢量的大小就对应着车轮的转速。 转动情况更简单,三个轮子同时朝一个方向转动就可以实现车身自转。如果不想让车身自转,就用陀螺仪做方向闭环。 将车身平动和转动对轮子速度的计算结果叠加,就可以实现任意方式运动。 |
 收藏
收藏 顶
顶 踩
踩

