只需一步,快速开始
热门: 51单片机 | 24小时必答区 | 单片机教程 | 单片机DIY制作 | STM32 | Cortex M3 | 模数电子 | 电子DIY制作 | 音响/功放 | 拆机乐园 | Arduino | 嵌入式OS | 程序设计
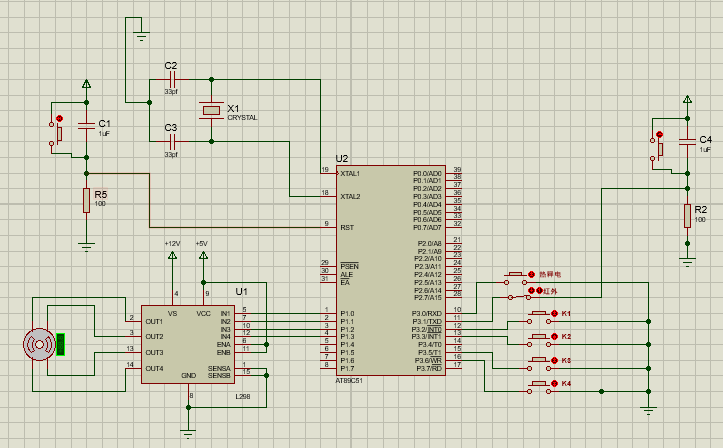
这是我的仿真原理图,现在的问题就是热释电开关按下后电机会一直停顿在一个角度,然后我设置的限位开关k1-k4按了后没有反应,并且程序设置好的关门程序也没有启动。 下面是我写的程序,求各位大神看看逻 ...
小黑屋|51黑电子论坛 | 管理员QQ:125739409;技术交流QQ群281945664
Powered by 单片机教程网
 收藏
收藏 顶
顶 踩
踩

