|
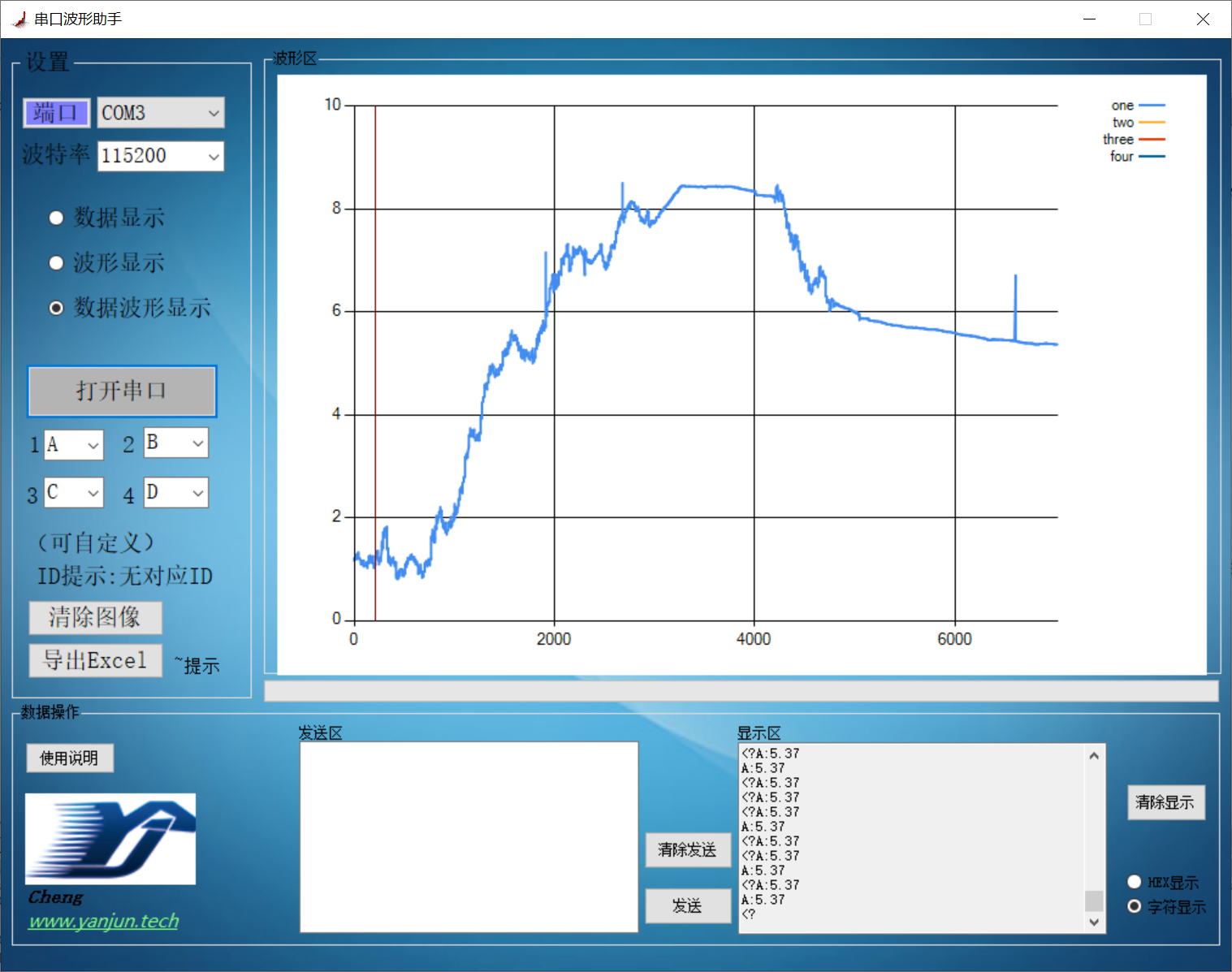
破案了,果然是电机振动的原因 太坑人了,现在考虑能不能自己用算法解决这个问题。。。。。。 |
|
或者换一个经过动平衡校正的电机 |
| 通过减震装置将电极机的振动隔离开 |
| 各位前辈,这MPU6050 零漂现象,现在发展的有好的解决方法吗 |
| 学习一下 |
dasSpieler 发表于 2022-12-1 22:47 能啊,拟合一下呗 |
| 抖动引起的 ,换算法。 |
dasSpieler 发表于 2022-11-28 20:21 没有做过卡尔曼滤波,感觉有点复杂,水平有限,看不懂 但是,论坛的上的平衡小车都是有卡尔曼滤波的,我相信是可以的 滑窗滤波其实效果跟平均值滤波都是差不多不的,好不了多少的 你需要更加复杂的滤波算法 卡尔曼滤波或者是IIR滤波 |
| 用锡纸一面贴透明胶做6050简易屏蔽,看漂移是否改善 |
ly7376 发表于 2022-11-28 21:04 又试了一下用手按住陀螺仪,尽可能减小其振动,偏移似乎减小了一点,但没有完全消除。电机运转产生的振动造成的偏差真的可以达到±2°并且不断朝一个方向累计吗  |
| 我感觉应该是电机振动弄的,因为6050没有磁力计,希望能帮助到你 |
| 可以到B站搜索关键词【6050 滤波】和【6050 漂移】,有很多视频可以参考。 |
glinfei 发表于 2022-11-28 19:00 电机的机械振动会使得陀螺仪的数据中心值发生显著偏移吗?刚试了一下,把车轮拆下来,按理这样会让机械振动小很多,但数据异常偏移的情况依然存在,不过比原来小了一些。如果将陀螺仪单独放到一块小板子上或者给电机增加减震配置,是否就会改善这一情况呢 |
Y_G_G 发表于 2022-11-28 17:55 我试着用滑窗滤波处理dmp输出的值,发现效果不大。而且按我的理解,滤波算法并不会改变数据的中心值,而现在的情况是数据不仅有明显波动,中心值也发生了显著的改变。卡尔曼滤波可以处理这个问题吗? |
| 应该是电机振动弄的,6050没有磁力计 |
|
卡尔曼滤波 论坛有现成的平衡小车程序,你可以下载来参考一下 |
wufa1986 发表于 2022-11-28 08:11 我使用的是dmp库,每4ms查询一次返回值 |
| 这些传感器灵敏度都很高,需要高级算法来得到正确姿态,有2种方案,一是自己自己移植算法,二是向mpu6050刷入官方固件,他自己就能运行算法 |
 收藏
收藏 顶
顶 踩
踩

