XBoom 发表于 2023-6-11 16:38 感谢解答 |
chxelc 发表于 2023-6-11 14:27 感谢,当时忘了回来看了 |
|
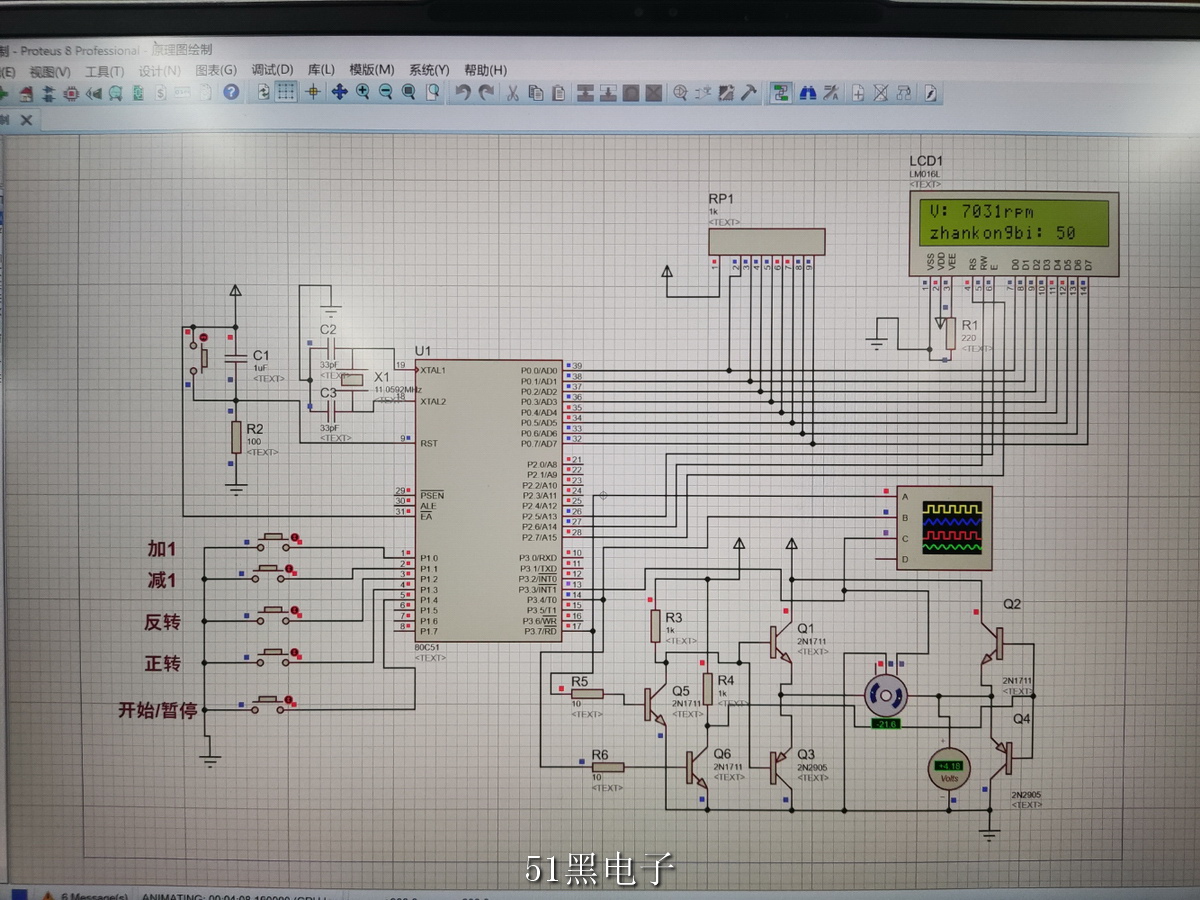
可以从电机驱动原理着手。 简单来说就是单片机输出驱动脉冲,分别输出到对应的三极管上,通过控制对应管子的通断频率来达到控制电机转速和旋转方向的目的。 |
|
假设: 正转时 P3.4 输出高电平,控制Q6导通,进而控制Q4导通; 同时P3.7输出低电平,控制Q5截止,进而控制Q1导通。电机电流的流向为左进右出: 正级->Q1 C极 -> Q1 E极 -> 电机 -> Q4 E级 -> Q4 C极 -> 负极 反转时 P3.7 输出高电平,控制Q5导通,进而控制Q3导通; 同时P3.4输出低电平,控制Q6截止,进而控制Q2导通。电机电流的流向为右进左出: 正级 -> Q2 C极 -> Q2 E极 -> 电机 -> Q3 E极 -> Q3 C极 -> 负极 |
| 很普通电路单片机驱动H桥的电机转向转速 |
 收藏
收藏 顶
顶 踩
踩

