|
所谓【模糊】是个假话,存在一个如何【模糊】的问题,即【模糊】方案。 无论什么方案都是围绕目标来做的。 有时目标参数有好几个。 而达成某个目标的方案也有N种,不过每种方案各有优缺点,如果某个方案只有优点,没有缺点,那么就其它方案也就【不存在】了。 以PID方案为例: P方案:真实、快速,但存在△P的误差。 I方案:可以无差,但速度太慢。 D方案:能提前预测控制方向,但可能刹不住车,过了头,搞反了。 【模糊】是将各种方案结合应用,在不同的条件下,采用不同的方案。 你也可以认为PID方案是【模糊】中的一种方式。 【应该要怎么调整模糊控制仿真的参数】取决于你对控制方案掌握多少种,每种方案的优缺点是什么,应用场景……,最后取舍部分,再一锅烩。 不急,慢慢来,知识需要积累。 |
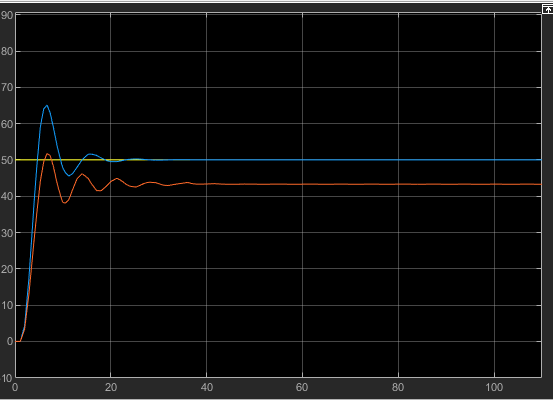
yzwzfyz 发表于 2023-11-17 16:49 请问为了对比PID和模糊控制的效果应该要怎么调整模糊控制仿真的参数啊 |
|
PID:本身就一个无限趋近的过程。所谓稳定,仅仅是给出了一个△小误差作为判据。可了理解为“永遠衰减振荡”。 模糊控制:可能采用PID方案,也可能不采用PID方案。 它可以在控制初期采用PID,而接近目标时取消了PID方案,采用一个估算恒定值作为控制输入值。看上去稳定了,但这时的输出不一定是理想标准值,与标准有一个△差,只是它认为△在允许范围内,也就认了。 |
 收藏
收藏 顶
顶 踩
踩

