|
这种是需要很多经验的,并不是新手用来上手的项目 1,电路要有堵转检测,不然,角度没有达到时,如果你用按着镜头不让它动,电机就会一直在增大电流,最终不是短路保护了就是烧电机了,或者是烧电源了 2,有刷电机不好控制力矩,直接控制PWM的占空比就可以了 3,要有正反转控制 4,PI控制就可以了,不需要PID的,可以使用三环控制,把其中的电流环换成PWM占空比就可以了,速度环和位置环还是要的 5,项目更多的工作量是调试过程,PID代码来去就那么点,参数调节才是让人头痛的 |
|
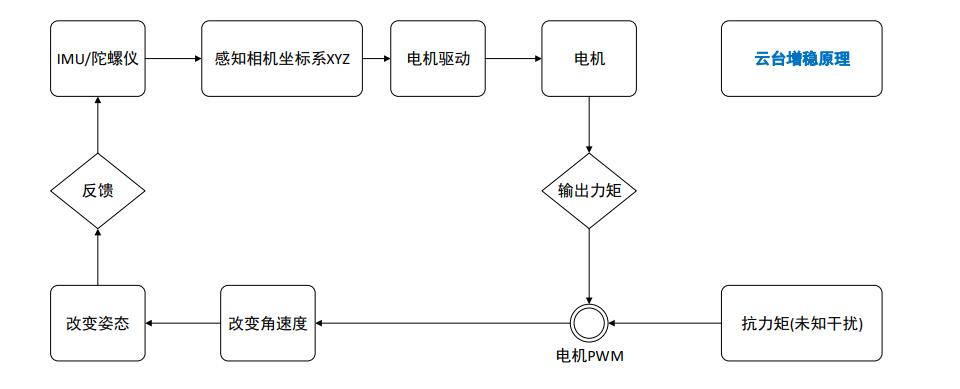
没有用过陀螺仪, 不知道其性能如何, 下面仅供参考: 1. 你PWM的条件条件是什么(一般是占空比), PID的输出直接和改变量关联自然就能控制PWM, 但是占空比代表什么, 取决于你的电机的控制方法是什么. 1.2. 电机的速度可以通过陀螺仪的变化计算得到, 例如 控制x轴的电机, x轴转动的角度的变化量就是陀螺仪x轴分量上的dθ/dt就是转动速度. 但是这也取决于你的陀螺仪的安装点与电机轴的机械结构上的相对关系. 这样电机的转速就可以得到了, 此转速可以作为PID的反馈输入. --- 但是我不知道陀螺仪的检测会不会有很大滞后, 是否适于做为速度反馈, 这个要你自己计算评估. 2. 手的干扰可以认为电机负载发生变化, 可以通过电路检测电机的电流得到, 当你检测到电机的负载变大时, 就加大输出, 负载减少时, 就减少输出, 这样手一松开, 就会立即相应减少输出, 也就不会突然冲过头了. 我对陀螺仪也不是很了解, 希望以上对你有方向上的帮助. |
|
1、首先根据角度反馈确定电机运动方向 2、使用pwm与电机速度关联,角度相差越大速度越块,反之亦然 3、当角度相差近似为零时,速度也就接近为零 4、可以先不考虑积分只考虑比例和微分,调试通过后可以适当增加积分或不考虑积分 |
| 我的理解是:1.流程应该是:应该是获取角度-》再计算需要修正的参数-》计算修正参数需要电机驱动量-》驱动电机,姿态变化-》再获取角度。2.计算给电机的驱动参数时可以使用PID方式,它计算结果是PWM值,这样会比较平滑,不用也可以的。3.仅靠陀螺仪很难对准目标啊,应该还有其他传感器吧。 |
| 算法是不是需要加反馈延时程序,反应速度和延迟控制 |
 收藏
收藏 顶
顶 踩
踩

