|
电子绘图小车系统设计思路 1. 系统概述 该系统主要由以下部分组成: 小车平台: 包含电机、车轮、滑轨、笔架等,负责移动和绘画。 控制系统: 采用单片机控制,负责接收用户指令,控制电机运动,调节笔架高度,实现绘图功能。 用户接口: 通过按键、显示屏或其他方式与用户交互,选择图形、设置参数和控制小车。 2. 控制电路设计 2.1 单片机选择 选择一款合适的单片机,例如Arduino Uno,具备足够的I/O口和处理能力。 2.2 电机驱动电路 选择合适的电机驱动模块,例如L298N电机驱动模块,驱动小车电机,实现正反转控制和速度调节。 将电机驱动模块与单片机连接,通过单片机控制电机驱动模块的信号,实现对电机的控制。 2.3 光电传感器 使用光电传感器监测小车行驶距离,通过单片机读取光电传感器的数据,计算小车移动距离。 将光电传感器与单片机连接,使用中断方式读取传感器信号,以提高响应速度和效率。 2.4 笔架设计 设计一个简单的笔架,通过舵机控制笔架的升降,实现画笔的抬起和放下。 将舵机与单片机连接,通过单片机控制舵机的转动角度,实现对笔架的控制。 2.5 用户接口 使用按键来选择图形类型,例如圆形、方形、矩形等。 使用数字按键或旋钮来设置图形参数,例如圆的半径、方形的边长、矩形的长宽等。 使用显示屏来显示用户选择和设置的参数信息,方便用户进行操作。 3. 软件设计 3.1 程序流程 初始化: 初始化单片机、电机驱动模块、光电传感器、舵机、按键、显示屏等硬件设备。 用户输入: 通过按键选择图形类型和设置参数,并显示在显示屏上。 绘制图形: 根据选择的图形类型和设置的参数,计算小车行驶路径,并通过电机驱动模块控制电机运动,通过舵机控制笔架升降,实现绘图功能。 循环控制: 不断循环执行步骤2和3,直到用户停止绘图。 3.2 代码框架 // 定义引脚 const int motorA_pin1 = 12; const int motorA_pin2 = 13; const int motorB_pin1 = 11; const int motorB_pin2 = 10; const int sensorPin = 2; const int servoPin = 9; const int buttonPin = 7; // 定义变量 int shape = 0; // 图形类型 0: 圆形,1: 方形,2: 矩形 int radius = 5; int sideLength = 5; int length = 10; int width = 5; unsigned long distance = 0; int direction = 1; // 运动方向,1: 正向, -1: 反向 // 初始化函数 void setup() { // 初始化串口 Serial.begin(9600); // 初始化电机驱动模块 pinMode(motorA_pin1, OUTPUT); pinMode(motorA_pin2, OUTPUT); pinMode(motorB_pin1, OUTPUT); pinMode(motorB_pin2, OUTPUT); // 初始化光电传感器 pinMode(sensorPin, INPUT); attachInterrupt(digitalPinToInterrupt(sensorPin), sensorInterrupt, RISING); // 初始化舵机 pinMode(servoPin, OUTPUT); // 初始化按键 pinMode(buttonPin, INPUT); } // 主循环函数 void loop() { // 读取按键输入 if (digitalRead(buttonPin) == LOW) { // 处理按键事件,选择图形类型和设置参数 } // 根据图形类型和参数,控制小车运动和笔架升降,实现绘图功能 switch (shape) { case 0: // 绘制圆形 drawCircle(radius); break; case 1: // 绘制方形 drawSquare(sideLength); break; case 2: // 绘制矩形 drawRectangle(length, width); break; } } // 光电传感器中断函数 void sensorInterrupt() { distance += direction * 1; // 每次触发中断,计数值加或减1 } // 绘制圆形 void drawCircle(int radius) { // 控制电机运动,并根据距离和半径计算运动时间 // 控制舵机升降,放下笔画圆,再抬起笔 } // 绘制方形 void drawSquare(int sideLength) { // 控制电机运动,并根据距离和边长计算运动时间 // 控制舵机升降,放下笔画边,再抬起笔 } // 绘制矩形 void drawRectangle(int length, int width) { // 控制电机运动,并根据距离、长和宽计算运动时间 // 控制舵机升降,放下笔画边,再抬起笔 } // 控制电机正转 void motorForward() { // 设置电机驱动模块的信号,实现电机正转 } // 控制电机反转 void motorBackward() { // 设置电机驱动模块的信号,实现电机反转 } // 设置电机速度 void setMotorSpeed(int speed) { // 设置电机驱动模块的信号,实现电机速度调节 } // 控制舵机转动 void setServoAngle(int angle) { // 设置舵机驱动信号,实现舵机角度控制 } 4. 注意事项 电机驱动模块: 选择合适的电机驱动模块,确保其能驱动小车电机,并具有足够的电流输出能力。 传感器精度: 光电传感器精度会影响绘图精度,选择合适的传感器,并进行校准。 笔架设计: 笔架设计应确保画笔能稳定地接触纸面,并能轻松升降。 代码调试: 编写程序时,需要仔细调试代码,确保程序能正确执行,并根据实际情况进行调整。 5. 拓展 可以增加更多图形类型,例如三角形、五角星等。 可以添加更高级的控制功能,例如轨迹规划、自动避障等。 可以使用蓝牙、WIFI等无线通信模块,实现手机或电脑远程控制绘图小车。 6. 总结 以上是一个电子绘图小车系统设计的思路和代码框架,具体的实现细节需要根据实际情况进行调整。该系统可以帮助用户学习单片机控制技术、电机驱动技术、传感器应用等,并可以激发学生的创造力和动手能力。 |
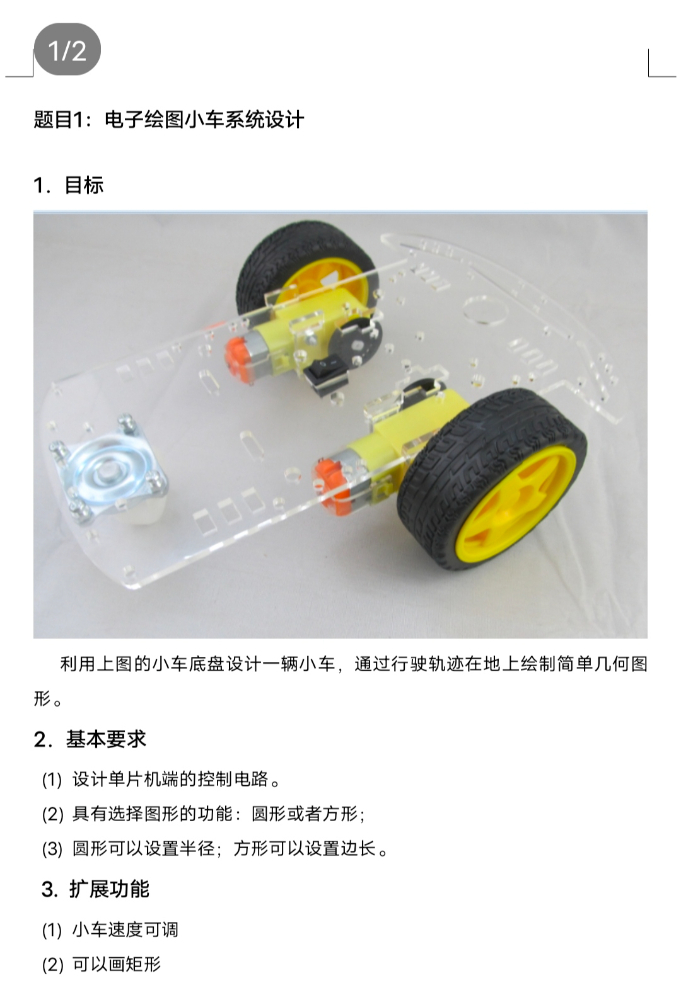
| 这是带码盘的直流电机,不要想着复杂的pwm控制,就是用中断数两个轮子走的码盘个数,计算各轮子走的距离,题的要求也是一笔画,不用抬笔,把笔固定在电机附近的孔就好。另外建议电机驱动轮放前边相对好走直线。 |
| 可以用51单片机设计,用L298驱动电机 |
| 简单的话:两个独立的电机驱动加一个mcu控制定时器发送pwm波就行 |
 收藏
收藏 顶
顶 踩
踩

