HAOHAO567 发表于 2025-4-9 20:32 您好,我也遇到了同样的问题,能请问您是怎么解决的吗? |
找朋友帮忙看了,发现是程序的问题,现在的ai还是比较弱的,写程序还是一般,只能保证能编译但是不能完全实现功能。现在已经搞定问题了,需要的功能都能实现了,谢谢大家的帮助了。 |
| 查一下硬件,线序接错了,也会只震动,不转。 |
| 会震动不会转,要么时序出错,要么丢步。 |
HAOHAO567 发表于 2025-3-29 16:02 你用的这个步进电机带减速齿轮,速度转起来估计也不会太快, 你能看到相序灯切换,说明你给的脉冲频率很低了,再加上减速齿轮的作用,最后输出轴转得就更慢了。 你可以在输出轴上粘贴个长点的纸片什么的,这样有转动了也看得明显一些,多转一会儿看看变化。 |
chxelc 发表于 2025-3-29 14:09 我程序的延时(50改成2和5)和电机的延时(100改成50)我都改了,也不行.我打算换一家店的电机了。 |
|
建议你按照如下步骤调整程序 1、处理注释掉主程序中初始化以外的所有处理 2、将步进电机的正反向驱动写成函数形式 3、在主程序中先测试电机的正反转,看成不成功 4、第三步成功了以后,再去把时钟部分和步进电机的部分整合起来。 单独函数化及测试步进电机的驱动,应该不麻烦。电机的正反转函数,按照单步方式书写。多步函数,按照步数调用单步函数。整个程序尽可能都函数化编程,这样逻辑关系清晰。 |
| 把延时时间改长或者改短看看。delay(50)那里。 |
| 一般启动速度太低或太高都会有这种现象,供参考 |
| 启动速度太快了,慢慢的启动 |
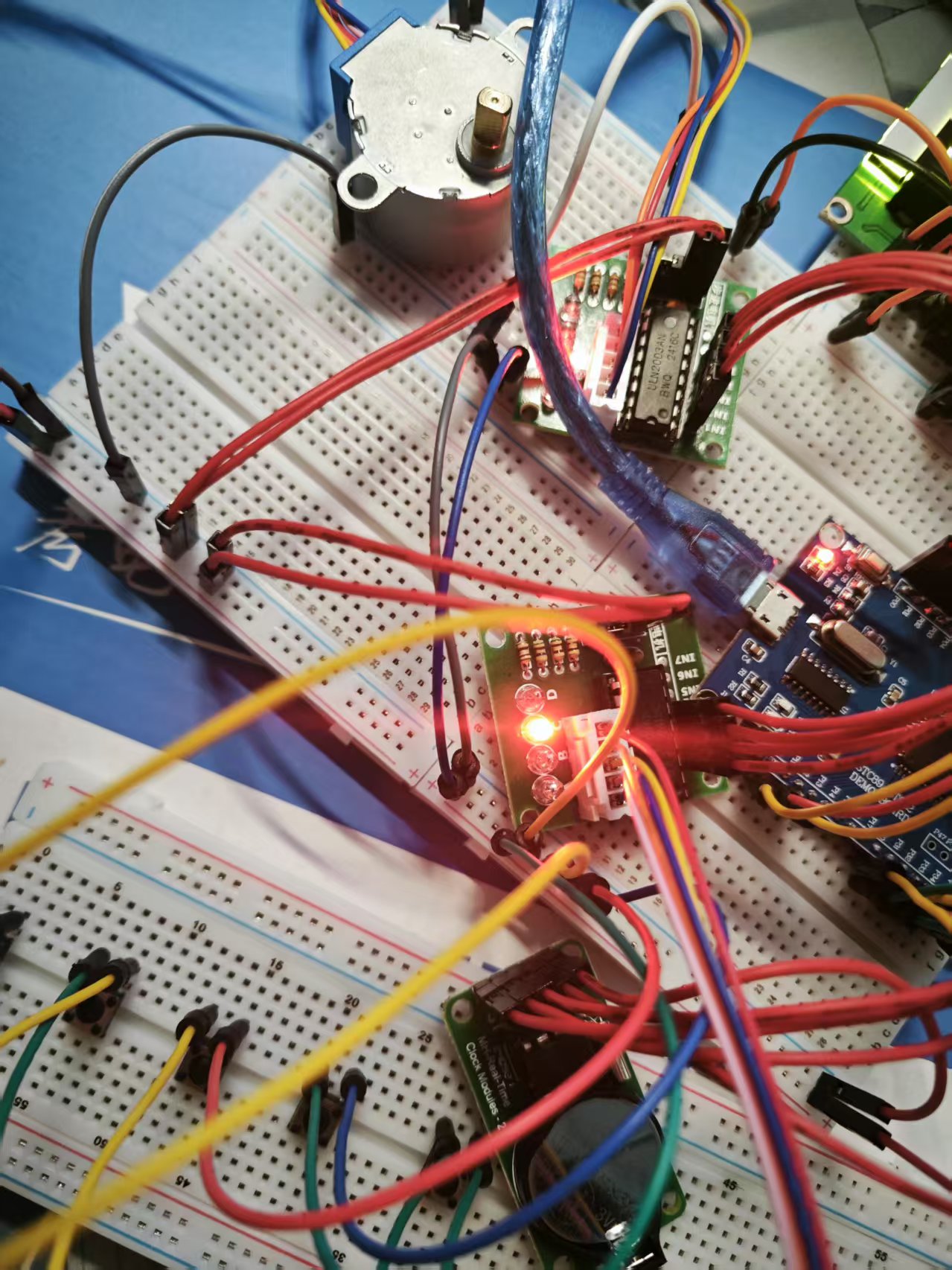
一直不成功,就只有电机不转的问题了,我真的搞不明白,各位大哥帮帮我 |
 收藏
收藏 顶
顶 踩
踩

