»»Ο≈ΘΚ 51ΒΞΤ§Μζ | 24–Γ ±±Ί¥π«χ | ΒΞΤ§ΜζΫΧ≥Χ | ΒΞΤ§ΜζDIY÷ΤΉς | STM32 | Cortex M3 | ΡΘ ΐΒγΉ” | ΒγΉ”DIY÷ΤΉς | “τœλ/ΙΠΖ≈ | ≤πΜζά÷‘Α | Arduino | «Ε»κ ΫOS | ≥Χ–ρ…ηΦΤ
»»Ο≈ΘΚ 51ΒΞΤ§Μζ | 24–Γ ±±Ί¥π«χ | ΒΞΤ§ΜζΫΧ≥Χ | ΒΞΤ§ΜζDIY÷ΤΉς | STM32 | Cortex M3 | ΡΘ ΐΒγΉ” | ΒγΉ”DIY÷ΤΉς | “τœλ/ΙΠΖ≈ | ≤πΜζά÷‘Α | Arduino | «Ε»κ ΫOS | ≥Χ–ρ…ηΦΤ
|
ΖΔ≤Φ ±Φδ: 2026-2-27 19:53
’ΐΈΡ’Σ“Σ:Έ“‘Ύ―ßœΑHC-SR04ΒΡΙΛΉς‘≠άμΘ§ΒΪ «Ε‘ΒΞΤ§Μζ≤ΜΧΪΝΥΫβΘ§ΈΣ ≤Ο¥’βSTC11 «14Ηω“ΐΫ≈ΒΡΘ§Εχ –Οφ…œ»¥’“≤ΜΒΫΘ§”–ΟΜ”–¥σά–ΑοΈ“Ϋβ¥π“Μœ¬’βάοΟΩΗω“ΐΫ≈ΒΡΙΠΡή « ≤Ο¥―ΫΘ§–Μ–Μ |
≥θ―ß’Ώ≥¬ ΖΔ±μ”Ύ 2026-3-2 14:09 ’βάο÷ς“ΣΖ÷≥…»ΐΗω≤ΩΖ÷ΘΚ 1ΓΔ÷ςΩΊIC≤ΩΖ÷ΘΚΆξ≥…¥ΞΖΔ–≈Κ≈ΒΡΦλ≤βΓΔ≤ζ…ζ8Ηω40KHz¬ω≥ε–≈Κ≈ΓΔΦλ≤βΜΊ≤®–≈Κ≈ΓΔ δ≥ωΨύάκ–≈Κ≈Β»ΘΜ 2ΓΔΖΔ…δ≤ΩΖ÷ΘΚ”…÷ςΩΊIC≤ζ…ζ8Ηω40KHz¬ω≥ε–≈Κ≈ΚσΘ§Ψ≠ΙΐMAX232Ζ≈¥σΚσ«ΐΕ·≥§…υ≤®ΖΔ…δΕΥΘΜ 3ΓΔΫ” ’≤ΩΖ÷ΘΚΫΪΈΔ»θΒΡΜΊ≤®–≈Κ≈Ζ≈¥σΘ§ΥΆΒΫ÷ςΩΊICΒΡIOΕΥΦλ≤βΜΊ≤®ΓΘ [Ψ≠―ι] Ή‘±ύ≥§…υ≤®≤βΨύΡΘΩιΘ®HC-SR04Θ©STCΒΞΤ§Μζ≥Χ–ρΩΣ‘¥http://www.51hei.com/bbs/dpj-128491-1.html 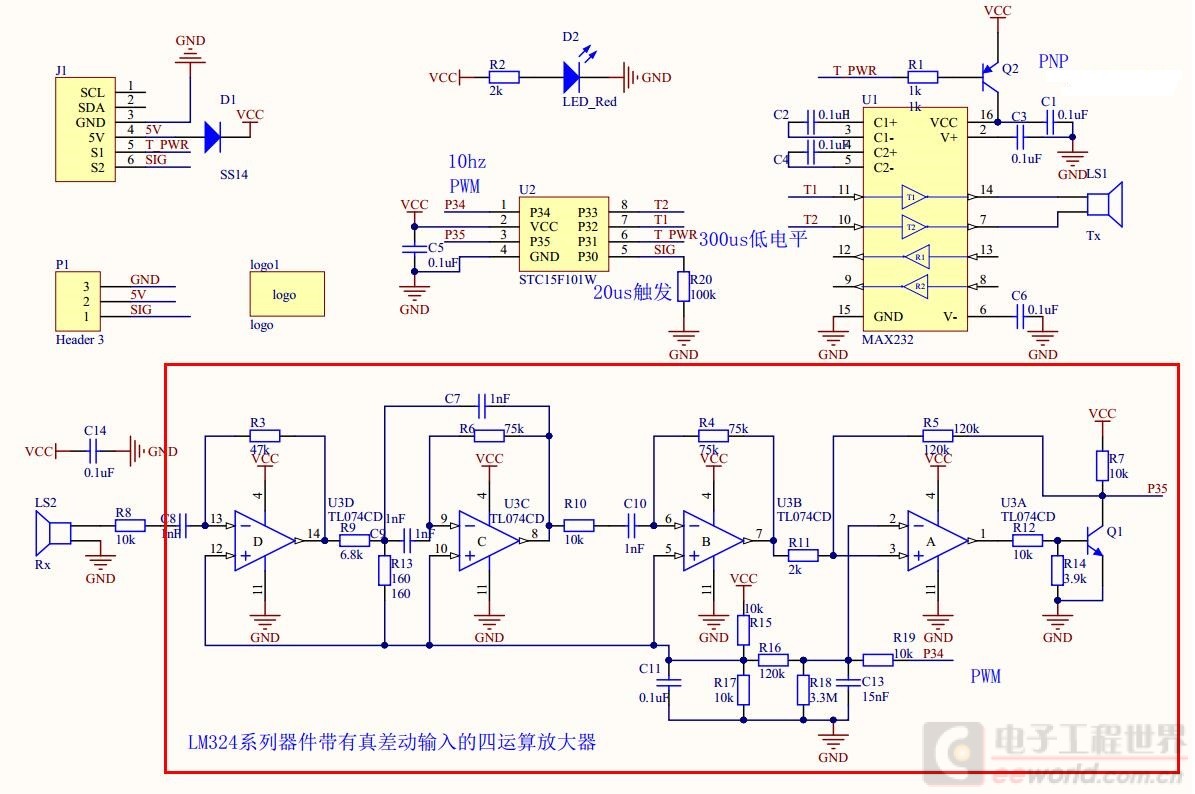 |
angmall ΖΔ±μ”Ύ 2026-3-1 19:19 ¥σά–Θ§ΙΊ”Ύ’βΗωΆΦΡψΡήΑοΈ“Ζ÷Έω≥ωœξœΗΒΡΙΛΉς‘≠άμ¬ο |
angmall ΖΔ±μ”Ύ 2026-3-1 19:19 Η––Μ¥σΗγΘ§’βΗωΕ‘Έ“ΒΡΑο÷ζΚή¥σ |
man1234567 ΖΔ±μ”Ύ 2026-3-1 16:43 “ρΈΣ’βΗωΆΦ «ΙΌΆχ’“ΒΡΘ§Έ“œ÷‘ΎœκΩ¥Ε°’βΗωΙΛΉς‘≠άμ |
a185980800 ΖΔ±μ”Ύ 2026-2-28 16:47 “ρΈΣΈ“≤ΜΧΪΕ°’βΖΫΟφΘ§Υυ“‘≤Μ÷ΣΒά‘θΟ¥’“ΤΫΧφ |
|
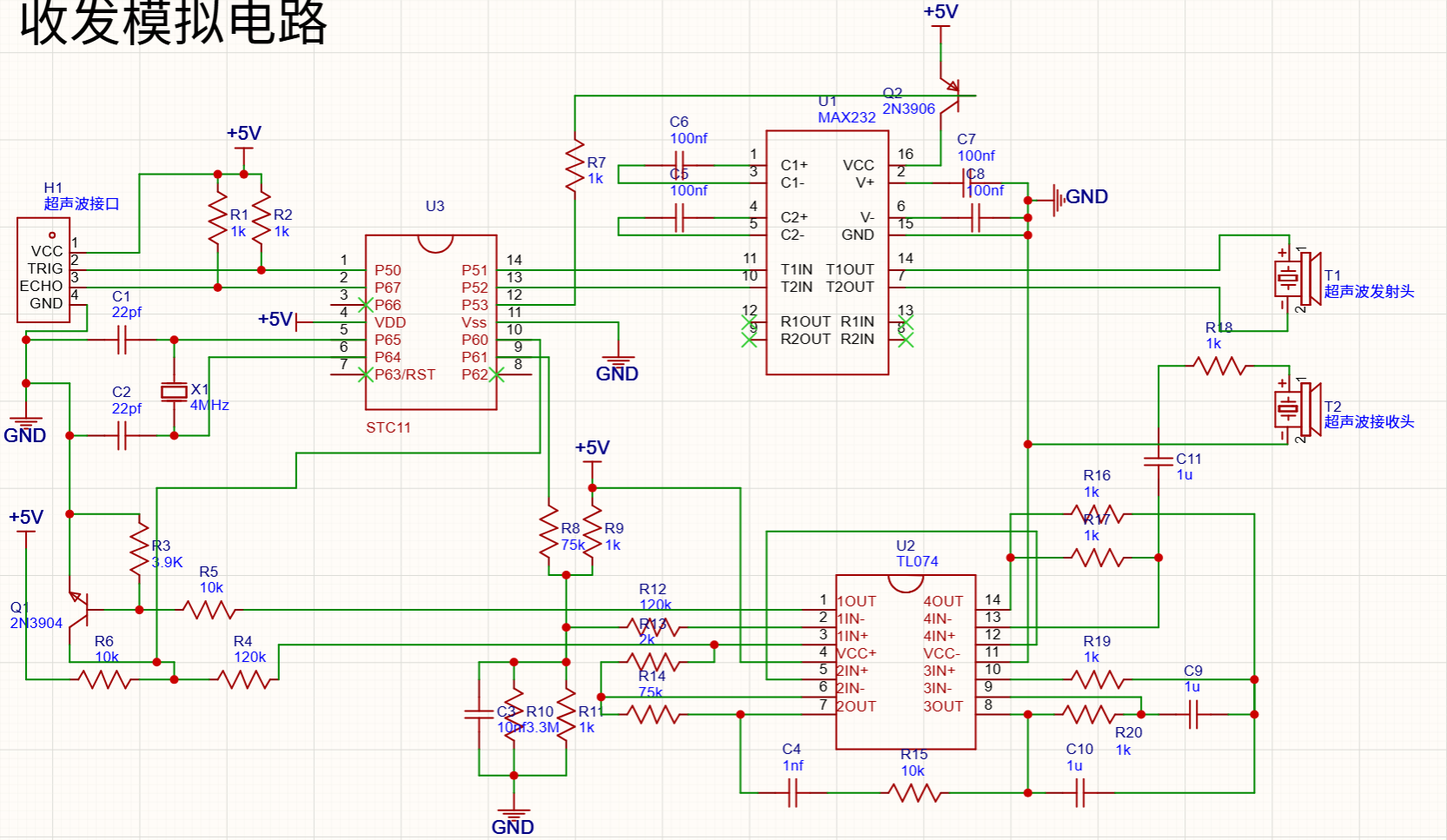
HC-SR04 «“ΜΩνΜυ”Ύ STC11œΒΝ– (SOP14ΖβΉΑ) ΒΞΤ§ΜζΩΊ÷ΤΒΡ≥§…υ≤®≤βΨύΡΘΩιΓΘΤδΙΛΉς‘≠άμ «ΘΚTRIG“ΐΫ≈Ϋ” ’÷Ν…Ό 10us ΒΡΗΏΒγΤΫ¥ΞΖΔ–≈Κ≈Θ§ΡΎ≤Ω STC11 «ΐΕ·ΧΫΆΖΖΔ≥ω 8 Ηω 40kHz ΖΫ≤®ΓΘ…υ≤®”ω’œΑ≠ΈοΖΒΜΊΚσΘ§Ϋ” ’ΧΫΆΖΦλ≤β≤Δ”… ECHO “ΐΫ≈ δ≥ω”κΆυΖΒ ±ΦδœύΒ»ΒΡΗΏΒγΤΫΘ§Ά®Ιΐ L=(t x V)/2 ΦΤΥψΨύάκΓΘ ΚΥ–ΡΙΛΉς‘≠άμœξΫβΘΚ ¥ΞΖΔ≤βΨύΘΚ Άβ≤ΩΒΞΤ§ΜζΗχΡΘΩιΒΡ Trig “ΐΫ≈“ΜΗω≤Μ–Γ”Ύ 10us ΒΡΗΏΒγΤΫ–≈Κ≈ΓΘ ΖΔ…δ≥§…υ≤®ΘΚ ΡΘΩιΡΎ≤ΩΒΡ STC11 ΒΞΤ§Μζ≥Χ–ρΉ‘Ε·≤ζ…ζ 8 Ηω 40kHz ΒΡΖΫ≤®–ρΝ–Θ§Ά®ΙΐΖΔ…δΧΫΆΖœρΆβΖΔ…δΓΘ Ϋ” ’ΖΒΜΊ–≈Κ≈ΘΚ Β±≥§…υ≤®”ωΒΫ’œΑ≠Έο≤ΔΖ¥…δΜΊά¥ ±Θ§Ϋ” ’ΧΫΆΖΜαΫ” ’ΒΫ–≈Κ≈Θ§STC11 ≥Χ–ρ Ι Echo “ΐΫ≈ά≠ΗΏΒγΤΫΓΘ ΦΤΥψΨύάκΘΚEcho ΗΏΒγΤΫ≥÷–χ ±Φδ = ≥§…υ≤®ΆυΖΒ ±Φδ tΓΘ ΦΤΥψΙΪ ΫΘΚ Ψύάκ L = (ΗΏΒγΤΫ ±Φδ x …υΥΌ(340m/s)) /2ΓΘ …υΥΌΩ…Α¥‘Φ 340m/s(0.034cm/us) ΦΤΥψΓΘ ≤βΝΩœΗΫΎΘΚ Ϋ®“ι≤βΝΩ÷ήΤΎ¥σ”Ύ 60msΘ§“‘±ήΟβΖΔ…δ–≈Κ≈”ΑœλΜΊœλΫ” ’ΓΘ STC11 (SOP14) ΒΡΉς”ΟΘΚ HC-SR04 Αε‘ΊΒΡ STC11 ΒΞΤ§ΜζΗΚ‘π«ΐΕ·ΧΫΆΖΖΔΥΆ≥§…υ≤®Θ§Φλ≤βΖΒΜΊ–≈Κ≈Θ§≤ΔΨΪ»ΖΦΤ ± δ≥ωΕ‘”Π ±Φδ≥ΛΕ»ΒΡ Echo –≈Κ≈Θ§Χφ¥ζΝΥάœ ΫΒγ¬Ζ÷–ΒΡΉ®”ΟΡΘΡβΒγ¬ΖΘ§ΧαΗΏΝΥ≤βΝΩΨΪΕ»ΚΆΈ»Ε®–‘ΓΘ ΆΦ÷– 14 Ϋ≈ STC11 ΒΡΗςΫ≈ΙΠΡή STC11F/10Fxx « 8051 ΡΎΚΥœΒΝ–Θ§”–Εύ÷÷ΖβΉΑΘ§14 “ΐΫ≈–ΓΖβΉΑ“ΜΑψ÷Μ“ΐ≥ω≤ΩΖ÷ P5/P6/P4/P3/P6 ΩΎœΏΚΆΒγ‘¥ΓΔ ±÷”ΓΔΗ¥ΈΜΓΘ ΫαΚœΡψΒΡ‘≠άμΆΦΥΩ”Γ±ξΉΔΘ§¥σ÷¬Ε‘”ΠΙΊœΒ»γœ¬Θ®¥”ΉσΒΫ”“ΓΔ¥”…œΒΫœ¬Α¥ΡψΆΦάοΒΡΙήΫ≈Κ≈Θ©ΘΚ “ΐΫ≈ 1ΘΚP50Θ®Ά®”Ο I/OΘ§Ω…Ής ΐΉ÷ δ»κΘ§ΡΘΩιΒΡ Trig “ΐΫ≈Θ©ΓΘ “ΐΫ≈ 2ΘΚP67Θ®Ά®”Ο I/OΘ§ ECHO “ΐΫ≈ δ≥ω”κΆυΖΒ ±ΦδœύΒ»ΒΡΗΏΒγΤΫΘ©ΓΘ “ΐΫ≈ 3ΘΚP66Θ®Ά®”Ο I/OΘ©ΓΘΓΑ‘ΛΝτ/Έ¥”ΟΓ± “ΐΫ≈ 4ΘΚVDDΘ®+5V Βγ‘¥Ϋ≈Θ©ΓΘ “ΐΫ≈ 5ΘΚP65Θ®Ά®”Ο I/OΘΜΡψΆΦ÷–Ϋ”ΒΫΨß’ώΡ«“Μ≤ύ–≈Κ≈œΏ…œΘ§ΧαΙ©–ΨΤ§ΒΡΙΛΉς ±÷”ΓΘ “ΐΫ≈ 6ΘΚP64Θ®Ά®”Ο I/OΘ©ΓΘP65ΚΆP64Ϋ”ΒΡΨß’ώΧαΙ©–ΨΤ§ΒΡΙΛΉς ±÷” “ΐΫ≈ 7ΘΚP63 / RSTΘ®Η¥ΈΜΫ≈Θ§Ά§ ±“≤Ω…≈δ÷ΟΈΣ P4.7 ÷°άύΒΡ“ΜΑψ I/OΘΜΆΦ÷–Ϋ”ΒΫ…œΒγΗ¥ΈΜ/Α¥ΦϋΒγ¬ΖΨΆ «”ΟΉςœΒΆ≥Η¥ΈΜΘ©ΓΘ ”“≤ύΡ«Ν–ΘΚ “ΐΫ≈ 8ΘΚP62Θ®Ά®”Ο I/OΘ©ΓΘΓΑ‘ΛΝτ/Έ¥”ΟΓ± “ΐΫ≈ 9ΘΚP61Θ®Ά®”Ο I/OΘΜΆΦάοΝ§ΒΫΆβΈßΡΘΡβ/±»ΫœΒγ¬ΖΘ§Ω…Ήω≤…―υΜρΩΊ÷ΤΘ©ΓΘ “ΐΫ≈ 10ΘΚP60Θ®Ά®”Ο I/OΘ©ΓΘΚήΩ…ΡήΫ” HC‑SR04 ΒΡ ECHOΘ§Ψ≠ΚσΦΕ’ϊ–Έ/±»ΫœΒγ¬ΖΫχ»κ TL074 ‘ΌΜΊΒΫ MCUΘ©ΓΘ “ΐΫ≈ 11ΘΚVSSΘ®GND Βγ‘¥ΒΊΘ©ΓΘ “ΐΫ≈ 12ΘΚP53Θ®Ά®”Ο I/OΘΜΩΊ÷ΤΒγ‘¥Ϋ”ΒΡMAX232–ΨΤ§Θ§”Οά¥≤ζ…ζ 40 kHz ΖΫ≤®Θ§Ψ≠ΙΐΒγΤΫΉΣΜΜΚΆ±Ε―ΙΚσ«ΐΕ·ΖΔ…δΧΫΆΖΓΘ “ΐΫ≈ 13ΘΚP52Θ®Ά®”Ο I/OΘΜ Ι”ΟMAX232ΉωΒγ―ΙΉΣΜΜΘ§«ΐΕ·≥§…υ≤®ΖΔ…δΧΫΆΖ “ΐΫ≈ 14ΘΚP51Θ®Ά®”Ο I/OΘΜMAX232 «ΐΕ·ΖΔ…δΜΜΡήΤς ÷±Ϋ” Ι”ΟΒΞΤ§ΜζΒΡIO «ΈόΖ®ΒΟΒΫ«ΩΒΡ«ΐΕ·–≈Κ≈ΒΡΓΘ‘ΎΤ’Ά®ΒΡ≥§…υ≤®ΡΘΩι÷–Θ§”–“Μ÷÷ΖΫΑΗ ««…ΟνΒΡ Ι”ΟΝΥMAX232–ΨΤ§ά¥«ΐΕ·≥§…υ≤®ΖΔ…δΆΖΒΡΓΘ‘ΎMAX232÷–Φ·≥…ΝΥΝΫ¬ΖRS232–≈Κ≈ΖΔΥΆΤςΓΘ–ΨΤ§±Ψ…μΆ®ΙΐΒγ»ίΩΣΙΊΖΫ ΫΫΪΙΛΉςΒγ―Ι5V±Ε―ΙΚΆΖ¥―Ι–Έ≥…ΝΥ’ΐΗΚ10VΒΡΒγ‘¥Θ§ Ι”ΟMAX232Ε‘≥§…υ≤®ΧΫΆΖΫχ––≤νΕ·«ΐΕ·Θ§Ω…“‘ΜώΒΟΒ»–ß’ΐΗΚ20VΒΡ«ΐΕ·–≈Κ≈Θ§’β―υΩ…“‘ΜώΒΟΚή«ΩΒΡ δ≥ω–≈Κ≈ΓΘ |
|
1ΓΔ¬ρ–Γ÷Ύ…œΡ≥“ΜΗω±ΠΘ§’βΗω≤Μ–η“ΣΕύ…Ό«°ΨΆΩ…“‘ΑλΒΫΘΜ 2ΓΔ“ΐΫ≈÷–≥ΐΝΥΒγ‘¥ΒΡ «ΙΧΕ®Θ§ΤδΥϊΕύΡήΉ‘––Ε®“εΓΘ |
| ΚξΨßΙΪΥΨSTC11œΒΝ–ΨΆΟΜ”–DIP14ΒΡΖβΉΑΘ§ΙήΫ≈ΙΠΡή≈≈Ν–“≤”κ…œΆΦœύ»Ξ…θ‘ΕΓΘ |
 ΆΘ≤ζΝΥΘ§…ΕΡξ¥ζΒΡάœΕΪΈςΝΥΜΜ“ΜΗω–¬“ΜΒψΒΡΒΞΤ§ΜζΆφ―Ϋ ΆΘ≤ζΝΥΘ§…ΕΡξ¥ζΒΡάœΕΪΈςΝΥΜΜ“ΜΗω–¬“ΜΒψΒΡΒΞΤ§ΜζΆφ―Ϋ |
–ΓΚΎΈί|51ΚΎΒγΉ”¬έΧ≥
|
 Ιήάμ‘±QQ:125739409;ΦΦ θΫΜΝςQQ»Κ281945664
Ιήάμ‘±QQ:125739409;ΦΦ θΫΜΝςQQ»Κ281945664
Powered by ΒΞΤ§ΜζΫΧ≥ΧΆχ

 ’≤Ί
’≤Ί ΕΞ
ΕΞ ≤»
≤»