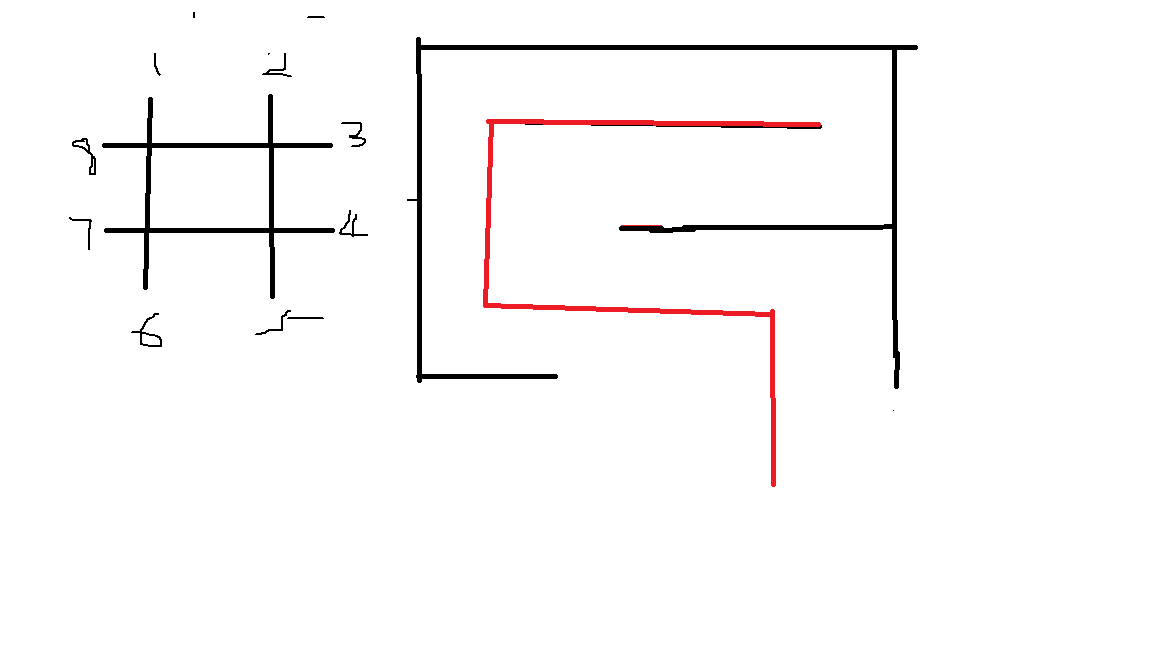
| 设八个方位吧,遇到障碍,在设定转向或后退的先后判断 |
| 弄几个子函数,前进后退,向左向右的,然后if调用就行了 |
|
在贴出程序来吧 #include<reg52.h> #define uint unsigned int #define uchar unsigned char #define L_GO {IN3=1;IN4=0;} #define R_GO {IN1=1;IN2=0;} #define L_BACK {IN3=0;IN4=1;} #define R_BACK {IN1=0;IN2=1;} #define L_STOP {IN3=IN4=1;} #define R_STOP {IN1=IN2=1;} #define D 205//占空比分子 #define RTIME 730 #define LTIME 1200 sbit ENL=P2^7; sbit ENR=P2^6; sbit IN1=P2^2; sbit IN2=P2^3; sbit IN3=P2^0; sbit IN4=P2^1; sbit one=P0^0; sbit two=P0^1; sbit thr=P0^5; sbit fou=P0^4; sbit fiv=P0^2; sbit six=P0^3; sbit sev=P0^6; sbit eig=P0^7; uint mid,D_left,D_right; uchar temp; void Delay(uint z) { uint x,y; for(x=z;x>0;x--) for(y=110;y>0;y--); } void TranL(uint L) //改变左轮占空比,参数最大值276,因256个计数值 { mid=L/1.085069; TH0=TL0=D_left=255-mid; } void TranR(uint R)//参数最大值276 { mid=R/1.085069; TH1=TL1=D_right=255-mid; } void Init() { TMOD=0x22;//定时器0,1八位自动重装模式 TH0=0x18;//默认250uS左,占空比5/6,直行 TL0=0x18; TH1=0x18;//默认250uS右,占空比5/6,直行 TL1=0x18; EA=1; ET0=1; ET1=1; ET2=1; T2CON=0x04;//定时器2,16位自动重装 RCAP2L=0xec; //定时器2初值,约300uS RCAP2H=0xfe; TR2=1; } void Go() { TranL(D);//占空比?/300 TranR(D);//占空比?/300 L_GO R_GO } void Back() { TranL(200);//占空比?/300 TranR(200);//占空比?/300 L_BACK R_BACK } void TurnLeft() { TranL(0); TranR(D); L_STOP R_GO } void TurnRight() { TranL(D); TranR(0); L_GO R_STOP } void Turnright1() { TranL(200); TranR(200); L_GO R_BACK } void main() { Init(); Delay(300); while(1) //12精度13 14cm,3478:10 11cm,56没测 { while(1) { if(one==0&&two==0) { if(thr&&fou&&sev&&eig) { Delay(3); if(one==0&&two==0&&thr&&fou&&sev&&eig) { L_STOP R_STOP Delay(1000); TurnRight(); Delay(RTIME); L_STOP R_STOP Delay(1000); break; } } if((thr==0||fou==0)&&sev&&eig) { Delay(3); if(one==0&&two==0&&(thr==0||fou==0)&&sev&&eig) { L_STOP R_STOP Delay(1000); TurnLeft(); Delay(LTIME); L_STOP R_STOP Delay(1000); break; } } if((sev==0||eig==0)&&thr&&fou) { Delay(3); if(one==0&&two==0&&(sev==0||eig==0)&&thr&&fou) { L_STOP R_STOP Delay(1000); TurnRight(); Delay(RTIME); L_STOP R_STOP Delay(1000); break; } } } if(one==0&&two&&thr&&fou&&sev&&eig==0||one==0&&two&&thr&&fou&&sev==0&&eig==0||one==0&&two==0&&thr&&fou&&sev&&eig==0) //左转 { L_STOP R_STOP Delay(1000); TurnRight(); Delay(RTIME); L_STOP R_STOP Delay(1000); break; } if(one&&two==0&&thr==0&&fou&&sev&&eig||one==0&&two==0&&thr==0&&fou&&sev&&eig||one&&two==0&&thr==0&&fou==0&&sev&&eig) //右转 { L_STOP R_STOP Delay(1000); TurnLeft(); Delay(LTIME); L_STOP R_STOP Delay(1000); break; } if(one==0&&two==0&&thr==0&&fiv&&six&&eig==0) { L_STOP R_STOP Delay(500); Turnright1(); Delay(1725); L_STOP R_STOP Delay(500); /* Back(); while(thr==0&&eig==0); Delay(500); if(thr&&fou&&sev&&eig) { TurnLeft(); Delay(TIME);//默认左转 break; } if((thr==0||fou==0)&&sev&&eig) { TurnLeft(); Delay(TIME);//左转 break; } if((sev==0||eig==0)&&thr&&fou) { TurnRight(); Delay(TIME);//右转 break; } */ } else { Go(); // Delay(500); } } } } void Timer_2()interrupt 5 { TF2=0; ENL=ENR=1; TR0=TR1=1; } void Timer_0()interrupt 1 { ENL=0; TR0=0; } void Timer_1()interrupt 3 { ENR=0; TR1=0; } |
| 有人看到望回复,明日必回,讨论切磋一二 |
| 明天再来发帖,晚了 |
| 本人刚刚入门,不能被这么个小小的问题打击了学习的自信心啊?高手指教一二,在下感激不尽 |
 收藏
收藏 顶
顶 踩
踩

