| 好好学习 下 |
| 这个根本不是这种步进电机的,而且也没有通过驱动 |
|
本帖最后由 bg8sya 于 2016-3-31 00:00 编辑 这个不能反转#include <reg52.h> //51芯片管脚定义头文件 #include <intrins.h> //内部包含延时函数 _nop_(); unsigned char code FFW[8]={0x01,0x03,0x02,0x06,0x04,0x0c,0x08,0x09}; //正转相序代码 unsigned char code REV[8]={0x09,0x08,0x0c,0x04,0x06,0x02,0x03,0x01}; //反转相序代码 sbit K1 = P3^2; //正转 sbit K2 = P3^3; //反转 sbit K3 = P3^4; //停止 sbit BEEP = P3^6; //蜂鸣器 /********************************************************* 1ms延时 *********************************************************/ void delay(unsigned int t) { unsigned int k; while(t--) for(k=0; k<125; k++); } /********************************************************** 0.1ms延时 **********************************************************/ void delayB(unsigned char n) { unsigned char i; while(n--) for (i=0; i<13; i++); } /**********************************************************/ /*蜂鸣器*/ void beep() { unsigned char i; for(i=0;i<100;i++){ BEEP=~BEEP; delayB(4); } BEEP=1; } /********************************************************/ /* /*步进电机正转 /* /********************************************************/ void motor_ffw() { unsigned char i; unsigned int j; for (j=0; j<8; j++) //转1*n圈 { if(K3==0){ delay(15); //消陡 if(K3==0) break; } //退出此循环程序 for (i=0; i<8; i++) //一个周期转45度 { P1 = FFW; //取数据 delay(2); //调节转速 } } } /********************************************************/ /* /*步进电机反转 /* /********************************************************/ void motor_rev() { unsigned char i; unsigned int j; for (j=0; j<8; j++) //转1×n圈 { if(K3==0){ delay(15); //消陡 if(K3==0) break; } //退出此循环程序 for (i=0; i<8; i++) //一个周期转45度 { P1 = REV; //取数据 delay(2); //调节转速 } } } /******************************************************** * * 主程序 * *********************************************************/ void main() { unsigned char r,N=64; //N 步进电机运转圈数 因为步进电机是减速步进电机 减速比是1/64 所以这里N=64时 步进电机外部的主轴转1圈 while(1) { if(K1==0) { delay(10); if(K1==0){ beep(); for(r=0;r<N;r++) { motor_ffw(); //电机正转 if(K3==0){ delay(10); if(K3==0){ beep(); break; } } //退出此循环程序 } } } else if(K2==0) { delay(10); if(K2==0){ beep(); for(r=0;r<N;r++) { motor_rev(); //电机反转 if(K3==0){ delay(10); if(K3==0){ beep(); break; } } //退出此循环程序 } } } else P1 = 0xf0; //关闭电机 } } /********************************************************/ |
hubaba 发表于 2016-3-30 13:44 你好,http://www.51hei.com/bbs/dpj-47351-1.html,关于这个控制,我实验不成功,请再次帮忙,谢谢,我是新手 |
hubaba 发表于 2016-3-30 13:44 好人,谢谢了 |
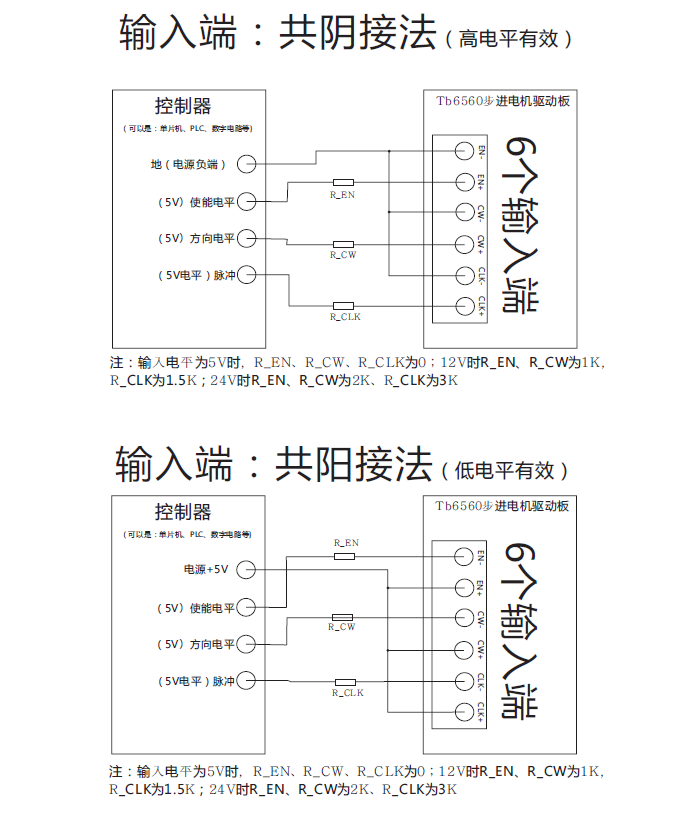
TB6560驱动42步进电机例程
|
 收藏
收藏 顶
顶 踩
踩

