
|
|
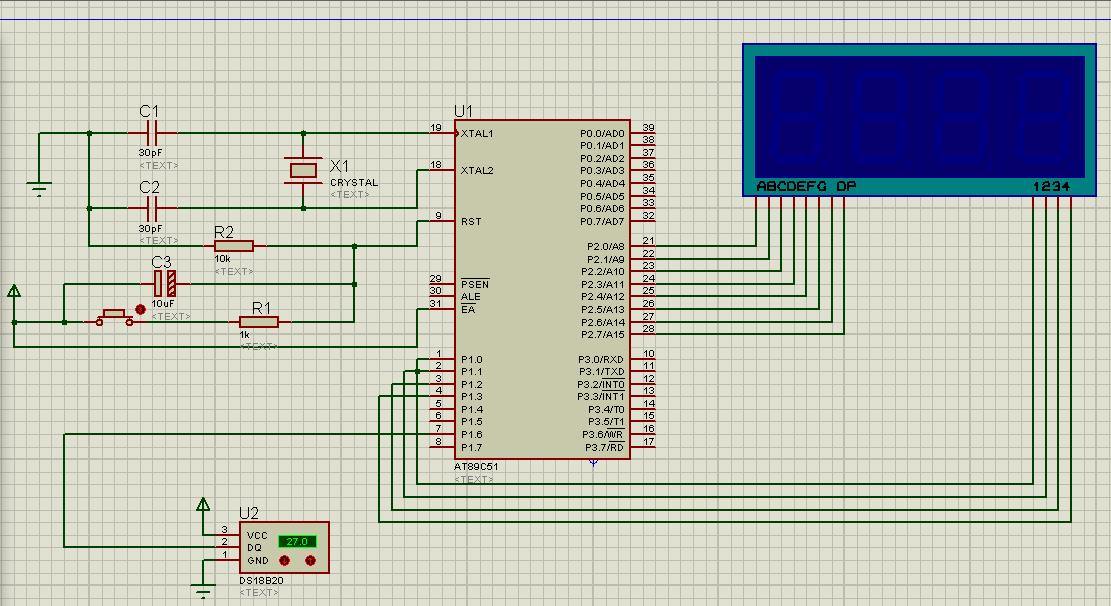
#include <avr/io.h> #include <util/delay.h> #define uchar unsigned char #define uint unsigned int #define BUS PORTC // Low level port/pin definitions 低级端口/引脚定义 #define sbit(x,PORT) (PORT) |= (1<<x) #define cbit(x,PORT) (PORT) &= ~(1<<x) #define pin(x,PIN) (PIN) & (1<<x) // Pins definition 引脚定义 #define s_digit1 sbit(5,PORTC) #define c_digit1 cbit(5,PORTC) #define s_digit2 sbit(4,PORTC) #define c_digit2 cbit(4,PORTC) #define out PORTC #define DQ_IN DDRA&=~(1<<7) #define DQ_OUT DDRA|=(1<<7) #define S_DQ sbit(7,PORTA) #define C_DQ cbit(7,PORTA) #define DQ pin(7,PINA) // Function Prototypes 函数原型 void init_ds18b20(void); uchar readbyte(void); void writecommand(uchar); uchar readtemp(void); uchar a, b, tt; // Main program 主函数 int main(void) { uchar i=0, temp; // Initialize Stack Pointer 初始化堆栈指针 SPL=0x54; SPH=0x04; // Configure port pins 配置端口引脚 DDRC = 0xff; DDRA = 0xff; while(1) { temp = readtemp(); for(i=0; i<10; i++) // 10 measures { // output the units 输出的单位 out = (temp/10) & 0x0f; s_digit1; c_digit2; _delay_ms(5); // output the tens 输出十 out = (temp%10) & 0x0f; c_digit1; s_digit2; _delay_ms(5); } } } // Start transaction with 1-wire line. 用单线启动事务 void init_ds18b20(void) { DQ_OUT; C_DQ ; _delay_us(600); S_DQ; _delay_us(50); DQ_IN; while(DQ); _delay_us(240); DQ_OUT; S_DQ; _delay_us(300); } // Read a byte from the sensor 从传感器读取一个字节 uchar readbyte(void) { uchar i = 0,data = 0; DQ_OUT; for (i=0; i<8; i++) { C_DQ ; data >>= 1; _delay_us(3); S_DQ; DQ_IN; _delay_us(12); if(DQ) data |= 0x80; DQ_OUT; S_DQ; _delay_us(45); _delay_us(5); } return(data); } // Write a command to the sensor 向传感器写入命令 void writecommand(uchar data) { uchar i; for(i=0; i<8; i++) { C_DQ; _delay_us(15); if(data & 0x01) S_DQ; else C_DQ; _delay_us(45); data >>= 1; S_DQ; _delay_us(2); } } // Read value from the sensor 从传感器读取值 uchar readtemp(void) { uint t; init_ds18b20(); // Convert 转换 writecommand(0xCC); writecommand(0x44); init_ds18b20(); // Read Scratch memory area 读暂存区 writecommand(0xCC); writecommand(0xBE); a = readbyte(); b = readbyte(); t = b; t <<= 8; t = t|a; tt = t*0.0625; return(tt); } |
| 有没有人来助攻一下 |
 收藏
收藏 顶
顶 踩
踩

