»»Ο≈ΘΚ 51ΒΞΤ§Μζ | 24–Γ ±±Ί¥π«χ | ΒΞΤ§ΜζΫΧ≥Χ | ΒΞΤ§ΜζDIY÷ΤΉς | STM32 | Cortex M3 | ΡΘ ΐΒγΉ” | ΒγΉ”DIY÷ΤΉς | “τœλ/ΙΠΖ≈ | ≤πΜζά÷‘Α | Arduino | «Ε»κ ΫOS | ≥Χ–ρ…ηΦΤ
»»Ο≈ΘΚ 51ΒΞΤ§Μζ | 24–Γ ±±Ί¥π«χ | ΒΞΤ§ΜζΫΧ≥Χ | ΒΞΤ§ΜζDIY÷ΤΉς | STM32 | Cortex M3 | ΡΘ ΐΒγΉ” | ΒγΉ”DIY÷ΤΉς | “τœλ/ΙΠΖ≈ | ≤πΜζά÷‘Α | Arduino | «Ε»κ ΫOS | ≥Χ–ρ…ηΦΤ
yzwzfyz ΖΔ±μ”Ύ 2017-4-17 23:14 –Μ–ΜΝΥ ’βΟ¥œξœΗΒΡΜΊ¥π –ΝΩύΝΥ Έ“¬ΐ¬ΐΩ¥Ε°Υϋ |
wosiyabo ΖΔ±μ”Ύ 2017-4-17 23:56 Ρψ’βΗω”ΟΒΫΝΫΗωΕ® ±ΤςΘΩΡψΩ¥Ω¥Έ“’βΗωΩ…“‘¬πΘΩ void intersvr1(void) interrupt 2 //ΚλΆβΙΛΉςΚ· ΐ { TR0=1; Tc=TH0*256+TL0;//Χα»Γ÷–Εœ ±ΦδΦδΗτ ±≥Λ TH0=0; TL0=0; //Ε® ±÷–Εœ÷Ί–¬÷ΟΝψ if((Tc>Imin)&&(Tc<Imax)) { m=0; f=1; return; } //’“ΒΫΤτ Φ¬κ if(f==1) { if(Tc>Inum1&&Tc<Inum3) { Im[m/8]=Im[m/8]>>1|0x80; m++; } if(Tc>Inum2&&Tc<Inum1) { Im[m/8]=Im[m/8]>>1; m++; //»Γ¬κ } if(m==32) { m=0; f=0; if(Im[2]==~Im[3]) { IrOK=1; TR0=0; } else { IrOK=0; //»Γ¬κΆξ≥…Κσ≈–ΕœΕΝ¬κ «Ζώ’ΐ»Ζ } } //ΉΦ±ΗΕΝœ¬“Μ¬κ } } |
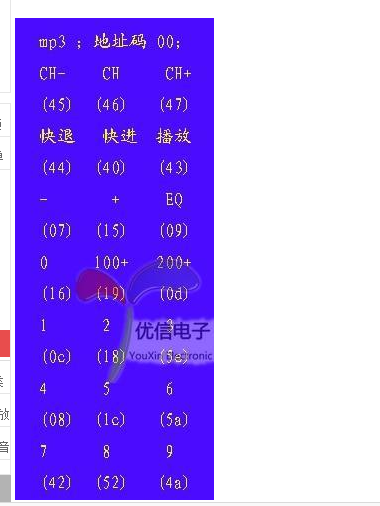
| άΐ»γΘΚ00FF45CB |
| ΚλΆβ±ύ¬κΗώ Ϋ ≥ß…Χ¬κ+≥ß…Χ≤Ι¬κ+ΟϋΝν¬κ+ΟϋΝν≤Ι¬κΓΘ |
| Άχ…œΕΦ”–≥Χ–ράΐΉ” œ»»Ξ ‘Ή≈Ω¥“Μœ¬ »ΜΚσΉ‘ΦΚ‘Ύ±ύ–¥ |
|
//STC89C52RC_ΥΪ±ΕΥΌ_Άβ≤ΩΨß’ώ24MHz #include "reg51.h" #include "intrins.h" typedef unsigned char BYTE; typedef unsigned int WORD; #define uchar unsigned char #define uint unsigned int unsigned char ir_dat_buf[4] = {0}; //ΚλΆβ“ΘΩΊΫ” ’¬κ¥φΖ≈ΈΜ÷Ο unsigned char mode; //ΚλΆβœΏΫ” ’ΡΘ ΫΜΚ¥φ sbit P32 = P3^2; //IR void Delay1120us(void) { TL1 = 0xC4; TH1 = 0xEE; TR1 = 1; while(!TF1); TR1 = 0; TF1 = 0; } void Delay840us(void) { TL1 = 0x38; TH1 = 0xF3; TR1 = 1; while(!TF1); TR1 = 0; TF1 = 0; } unsigned char ir_read(void) // ΐΨί 0: 0.56msΒΆΒγΤΫ,0.56msΗΏΒγΤΫ { // ΐΨί 1: 0.56msΒΆΒγΤΫ,1.58msΗΏΒγΤΫ unsigned char i,ir_temp = 0; for(i = 0; i < 8; i++) { while(!P32); //Β»¥ΐ0.56msΒΆΒγΤΫΫα χ Delay840us(); //¥”ΗΏΒγΤΫΩΣ Φ―” ±0.84ms if(P32 == 1) { ir_temp = (ir_temp << 1) + 1; //ΕΝΒΫ ΐΨί1 Delay1120us(); //―” ±Β»¥ΐ1.68msΗΏΒγΤΫΫα χ } else { ir_temp = ir_temp << 1; //ΕΝΒΫ ΐΨί0 } } return ir_temp; } void main() { TMOD = 0x11; //set timer0 as mode1 (16-bit) TL0 = 0; //Ε® ±4ms TH0 = 0; TR0 = 1; //timer0 start running TF0 = 1; IT0 = 1; //set INT0 int type (1:Falling 0:Low level) ET0 = 1; //enable timer0 interrupt EX0 = 1; //enable INT0 interrupt EA = 1; //open global interrupt switch mode = 0;//ΚλΆβœΏΫ” ’«ε≥ΐ while (1) { switch(mode) { case 1: {mode=0;}break; case 2: {mode=0;}break; case 3: {mode=0;}break; default: break; } } } void exint0() interrupt 0 //Α¥Φϋ“Μ¥Έ: “ά¥ΈΖΔΥΆ “ΐΒΦ¬κ + ΒΊ÷Ζ + ΒΊ÷Ζ»ΓΖ¥ + ΐΨί + ΐΨί»ΓΖ¥ { static unsigned i; EX0 = 0; //ΙΊ±’Άβ≤Ω÷–Εœ,»‘Ω…“‘÷¥––“‘œ¬≥Χ–ρ for(i = 0; i < 10; i++) // “ΐΒΦ¬κ”…9msΒΆΒγΤΫΦΑ4.5msΗΏΒγΤΫΉι≥…, Ϋ”Ή≈ «ΒΆ8ΈΜΒΊ÷Ζ¬κ, ΗΏ8ΈΜΒΊ÷Ζ¬κ { // Ν§ΖΔ¬κ”…9msΒΆΒγΤΫΦΑ2.25msΗΏΒγΤΫΉι≥…, ΗζΉ≈ «0.56msΒΆΒγΤΫ, »ΜΚσΕΦ «ΗΏΒγΤΫ Delay840us(); if(P32) //Φλ≤β“ΐΒΦ¬κ9ms «Ζώ”–ΗΏΒγΤΫ,”–‘ρΆΥ≥ω { EX0 = 1; return; } } while(!P32); //Β»¥ΐΗΏΒγΤΫΒΡΒΫά¥ ΉΔ:ΨΓΝΩ≤…”Ο―” ±ά¥Φλ≤β,≤Μ»ΜΩ…ΡήΜαΫχ»κΥά―≠ΜΖ Delay840us(); Delay840us(); // Φλ≤βΝ§Α¥; ―” ±2.52ms,Φλ≤β «Ζώ”–ΒΆΒγΤΫ,”–±μ ΨΑ¥ΦϋΝ§Α¥,«“ΆΥ≥ω Delay840us(); if(!P32) { EX0 = 1; return; } while(P32); //Β»¥ΐ4.5msΗΏΒγΤΫΫα χ,ΩΣ ΦΫ” ’ ΐΨί _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); ir_dat_buf[0] = ir_read(); ir_dat_buf[1] = ir_read(); ir_dat_buf[2] = ir_read(); ir_dat_buf[3] = ir_read(); EX0 = 1; //ΩΣΤτΆβ≤Ω÷–Εœ,Β»œ¬¥Έ–≈Κ≈ } void tm0_isr() interrupt 1 using 1 { ET0 = 0;//Ϋϊ÷ΙΆβ≤Ω÷–Εœ,Ζά÷Ι‘ΎΫ” ’ΒΫ ΐΨίΚσ¥ΠάμΙΐ≥Χ÷–,‘ΌΑ¥“ΘΩΊ‘λ≥…≥εΆΜ TL0 = 0x60; //Ε® ±4ms TH0 = 0xC1; if(((ir_dat_buf[0] == 0x00) && (ir_dat_buf[1] == 0xff))&&((ir_dat_buf[2])== ~(ir_dat_buf[3])))//”ΟΜ߬κ0x00,0xFF { switch(ir_dat_buf[2]) { case 0x45: {mode=1;}break; case 0x46: {mode=2;}break; case 0x47: {mode=3;}break; default: break; } ir_dat_buf[0]=0;//«ε≥ΐΚλΆβœΏΫ” ’ΜΚ¥φ ir_dat_buf[1]=0;//«ε≥ΐΚλΆβœΏΫ” ’ΜΚ¥φ ir_dat_buf[2]=0;//«ε≥ΐΚλΆβœΏΫ” ’ΜΚ¥φ ir_dat_buf[3]=0;//«ε≥ΐΚλΆβœΏΫ” ’ΜΚ¥φ } ET0 = 1; //≥δ–μΆβ≤Ω÷–Εœ,¥ΠάμΆξ ΐΨίΚσ‘Ό¥ρΩΣΆβ≤Ω÷–Εœ } |
| ΒΟΒΫΦϋ¬κΚσΒΡ»ΥΜζΕ‘ΜΑ≥Χ–ρΒΡΗ¥‘”≥ΧΕ»Θ§”κ≥Χ–ρΒΡΡΩΒΡœύΙΊΓΘ“ΜΑψ±»ΫœΗ¥‘”Θ§≤Μ‘Ύ¥ΥœΗ ωΓΘ |
| Κή Β”ΟΘ§ΚήΗχΝΠ |
|
±ΨΧϊΉνΚσ”… yzwzfyz ”Ύ 2017-4-17 23:28 ±ύΦ≠ Ϋβ≥ωΘΚ“ΐΒΦΖϊΓΔ0ΓΔ1ΚσΘ§“ά–≠“ιΉιΉΑΦ¥Ω…ΒΟΒΫΦϋ¬κΓΘ |
|
±ΨΧϊΉνΚσ”… yzwzfyz ”Ύ 2017-4-17 23:26 ±ύΦ≠ 1ΓΔΚλ…Ϊ”ΟΫ” ’ΡΘΩιHS0038BΘ§¥”INT0 δ»κΘ§œ¬―Ί≤ζ…ζ÷–ΕœΓΘ”ΟT3ΦΤ ΐΚλΆβ¬ω≥εΩμΕ»Θ® «œ¬―ΊΒΫœ¬―ΊΘ©ΓΘ ΚλΆβ“ΘΩΊΤς≤…”ΟUPD6122ΩΊ÷Τ–ΨΤ§NEC±ύ¬κΗώ ΫΘ§÷Μ»Γœ¬―ΊΓΘΒΪΚλΆβΡΘΩιΫ” ’ΜαΖ¥ΉΣ≥……œ―ΊΓΘ 2ΓΔINT0÷–ΕœΚσΘ§Φ«¬Φ…œ¥ΈΚλΆβΩμΕ»Θ®œ¬―ΊΒΫœ¬―ΊΘ©Θ§‘ΌΗ¥ΈΜT3÷Ί–¬ΦΤ ΐΘ§ΉΦ±ΗΦΤ ΐœ¬Ηω¬ω≥εΩμΕ»ΓΘ 3ΓΔΚλΆβ¬ω≥εΩμΕ» ΐΨίΘΚΘ®”–»ί¥μΖΕΈßΘ§Φ¥…œœ¬œόΘ© 3.1ΓΔ“ΐΒΦ¬κ=5900H-78FFH »ί¥μΖΕΈß84%-115% *(9ms+4.5ms)Θ§Ήω“ΜΗω±ξΦ«B_INFRLEAD=1Θ§±μ Ψ“―”–“ΐΒΦΖϊΘΜ 3.2ΓΔ0=0800H-0AFFH »ί¥μΖΕΈß87%-119% *(1.125ms+0.56ms)ΘΜ 3.3ΓΔ1=0F00H-13FFH »ί¥μΖΕΈß85%-114% *2.25msΘΜ 3.4ΓΔΤδΥϋΘΚΖ≈ΤζΉςΖœ¬κ¥ΠάμΘ§«εB_INFRLEAD=0Θ§±μ Ψ…–Έό“ΐΒΦΖϊΘΜ 3.5ΓΔΦΤ ΐT3“γ≥ω ±Θ§«ε0ΆΘ÷ΙΦΤ ΐΓΘΘ®ΚλΆβ δ»κ“―Ϋα χΘ§‘ρT3ΆΘ÷Ι≤Μ‘ΌΦΤ ΐΘ© ΉΔΘΚ”ΟΒΡ «24MHzΒΡΨß’ώΓΘ |
|
«ΑΦΗΧλ“≤¬ρΝΥ’βΗωΩΊ÷ΤΤςΓΘΜ®ΝΥΦΗΧλΘ§–¥ΝΥ»ΥΜζΕ‘ΜΑ≥Χ–ρΓΘ œ÷ΫΪΚλΆβΫβ¬κ≤ΩΖ÷ΒΡΖΫΑΗΘ§ΗφΥΏΡψΓΘ |
–ΓΧΤΧΤ ΖΔ±μ”Ύ 2017-4-17 13:30 ≤ΜΧΪΕ°ΑΓ  Ρή’“œ¬ΗχΈ“≤ΈΩΦ¬π Ρή’“œ¬ΗχΈ“≤ΈΩΦ¬π |
| ΚλΆβ“ΘΩΊΒΡ±œ…ηΘ§Ά§«σΑΓ |
| ΚλΆβ“ΘΩΊ±ύ¬κ ÷ς“Σ « ±–ρΚή÷Ί“Σ Άχ…œΕΦ”–≥Χ–ράΐΉ” œ»»Ξ ‘Ή≈Ω¥“Μœ¬ »ΜΚσΉ‘ΦΚ‘Ύ±ύ–¥ |
–ΓΚΎΈί|51ΚΎΒγΉ”¬έΧ≥
|
 Ιήάμ‘±QQ:125739409;ΦΦ θΫΜΝςQQ»Κ281945664
Ιήάμ‘±QQ:125739409;ΦΦ θΫΜΝςQQ»Κ281945664
Powered by ΒΞΤ§ΜζΫΧ≥ΧΆχ

 ’≤Ί
’≤Ί ΕΞ
ΕΞ ≤»
≤»