Altium Designer画的智能窗帘原理图和PCB图如下:(51hei附件中可下载工程文件)

随着科技的深化发展,人民生活水平的日益提高,自控系统从安防、采暖、采光、烹煮等领域不断扩展,家居智能化的趋势越来越明显。本文针对的,是智能窗帘这一块,它的任务是通过简单省力的操作来实现室内采光自动变化,解决一些实际的困难与需求。 例如:已经上床睡觉,却发现窗帘没关;小朋友、残疾者拉窗帘的不便;外出旅游,需要房间保持定时采光,去湿去霉;希望早上窗帘到点打开,用明亮的阳光来唤醒自己;由于生活的紧凑,没有精力管理窗帘又希望室内采光自动保持在舒适的程度;飘窗、高窗、悬窗、落地窗等窗帘的拉不动或够不着;希望非触碰地拉动层层叠叠的窗帘,保持其造型的美观….这种种问题,通过使用智能电动窗帘便能轻松解决,从而使现代生活变得更方便舒适。
ppt内容预览:
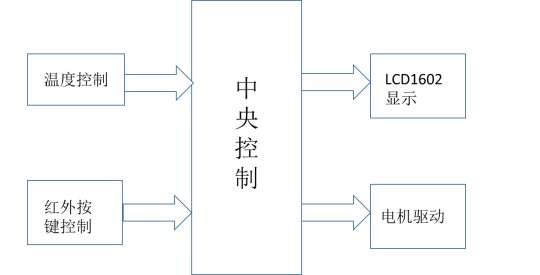
2项目的硬件工作原理分析和调试,各模块介绍 2.1分析项目的硬件工作原理 1.通过温度传感器来自动的控制窗帘的关闭与开启; 2.通过红外遥控器来手动控制窗帘的关闭,开启,暂停,启动,加速,减速以及智能与人工的转换; 3.测得的温度与相应的步进电机的速度可以通过LCD1602显示出来。 2.2介绍该项目中使用的模块,及其作用 2.2.1步进电机 步进电动机是一种将电脉冲信号转换成角位移或线位移的机电元件。步进电动机的输入量是脉冲序列,输出量则为相应的增量位移或步进运动。正常运动情况下,它每转一周具有固定的步数;做连续步进运动时,其旋转转速与输入脉冲的频率保持严格的对应关系,不受电压波动和负载变化的影响。 2.2.2DS18B20 DS18B20中的温度传感器可完成对温度的测量,以12位转化为例:用16位符号扩展的二进制补码读数形式提供,以 0.0625℃/LSB形式表达,其中S为符号位。 这是12位转化后得到的12位数据,存储在18B20的两个8比特的RAM中,二进制中的前面5位是符号位,如果测得的温度大于0, 这5位为0,只要将测到的数值乘于0.0625即可得到实际温度;如果温度小于0,这5位为1,测到的数值需要取反加1再乘于0.0625即可得到实际 温度。 例如+125℃的数字输出为07D0H,+25.0625℃的数字输出为0191H,-25.0625℃的数字输出为FE6FH,-55℃的数字输出为FC90H。 2.3系统整体框架
4.总结(收获,缺陷,改进,提高)
本设计介绍了基于STC89C52的智能窗帘控制系统的工作原理及实现过程,我在这个星期内阅读大量有关如何通过电机转动来控制窗帘的关闭和开启,以及数字温度计原理及设计的相关资料,设计了实现采集与显示功能的软件程序,完成了基于STC89C52的智能窗帘控制系统的设计。设计中采用最常用的单片机STC89C52作为主控模块,单总线数字温度传感器DS18B20用来测量温度,温度数据采用LCD1602显示。本设计的特点是构成系统的硬件器件少,操作简单,数据处理功能强。
智能化课程设计重点就在于软件算法的设计,虽然以前还做过这样的设计但这次设计,但都比较简单程序也不是很长也不需要有很巧妙的程序算法。这次软件设计中让我充分理解到了利用子程序的好处。在设计中也遇到很多问题比如相关设备的初始化,经过多次调试修改终于显示成功。还有很多下问题则不必累述。通过这次项目使我学习到了很多的东西,不仅加深了对专业知识的理解,而且更好地把理论知识与实践相结合,提高了自身的动手能力和实践水平,增强了学习单片机系统开发与设计的兴趣。
3.软件实现原理和调试以及联合调试的总结
全部资料51hei下载地址:
 智能窗帘.rar
(5.78 MB, 下载次数: 200)
智能窗帘.rar
(5.78 MB, 下载次数: 200)
| 








 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩

