|
系统方案 本系统主要由STC89C52RC芯片组为核心、PCF8591模块、液位传感器模块、Ph值传感器模块、6V电池组供电组成,下面分别论证这几个模块的选择。 1、方案的论证与选择方案一:由STC89C52RC芯片组为核心、PCF8591模块、重力传感器模块、Ph值传感器模块、6V电池组供电组成, 方案二:由STC89C52RC芯片组为核心、PCF8591模块、超声破传感器模块、Ph值传感器模块、6V电池组供电组成, 方案三:由STC89C52RC芯片组为核心、PCF8591模块、液位传感器模块、Ph值传感器模块、6V电池组供电组成, 分析方案一,使用重力传感器,但重力传感器不能在水库,河流等复杂地区使用,只能用于实验阶段,所以放弃方案一。 分析方案二,使用超声波传感器,超声波传感器在水库,河流等复杂地区不好固定,所以方案二也不考虑。 方案三使用液位传感器模块,方便参赛使用,最后选择方案三。
(2)水位传感器水位传感器工作原理,用静压测量原理:当液位变送器投入到被测液体中某一深度时,传感器迎液面受到的压力公式为:Ρ = ρ .g.H + Po式中: P :变送器迎液面所受压力 ρ:被测液体密度 g :当地重力加速度 Po :液面上大气压 H :变送器投入液体的深度 同时,通过导气不锈钢将液体的压力引入到传感器的正压腔,再将液面上的大气压 Po 与传感器的负压腔相连,以抵消传感器背面的 Po, 使传感器测得压力为:ρ .g.H ,显然 , 通过测取压力 P ,可以得到液位深度。 功能特点: 稳定性好,满度、零位长期稳定性可达 0.1%FS/ 年。在补偿温度 0 ~ 70 ℃范围内,温度飘移低于 0.1%FS ,在整个允许工作温度范围内低于 0.3%FS 。 具有反向保护、限流保护电路,在安装时正负极接反不会损坏变送器,异常时送器会自动限流在 35MA 以内。 固态结构,无可动部件,高可靠性,使用寿命长。 安装方便、结构简单、经济耐用。 (3)Ph值测量Ph值传感器工作原理,在传感器内部的 pH 放大器是一个能通过数据采集器监测的有标准 pH 电极的电路。传感器连接线的末端是一个BTA 插头或一个 5-针的 DIN 插头来与数据采集器连接。 在 pH 7 的缓冲溶液中,它将产生一个 1.75 伏特的电压。pH 值每增加1,电压增加0.25 伏。pH 值每减少1,电压降低 0.25 伏。 这个冻胶填充的 pH 值传感器的设计测量范围为:0 到 14。它在玻璃感应电极头延长出一个冻胶体,是初中、高中、大学中进行科学研究、环境测量的良好的设备。冻胶填充的参考半电化池是密封的,所以它无需重充。 2、水位高度的计算 由于本次使用的水位传感器量程有限,故以容器150mm高度线做为0刻度线,水位传感器检测数据+150mm为最终结果,具体高度以12864液晶显示屏显示为准。 3、Ph值的计算 在 pH 7 的缓冲溶液中,它将产生一个 1.75 伏特的电压。pH 值每增加1,电压增加 0.25 伏。pH 值每减少1,电压降低 0.25 伏。 4、供电电池组电压的计算 本次电池组由4节干电池组成,电压为6V,因部分元器件最高工作电压为5V,故使用1K电阻对其进行分压,使其最后输出电压降为5V。 三、电路与程序设计
1、电路的设计
(1)系统总体框图系统总体框图如图所示 
系统总体框图 (2)水位检测子系统框图1、水位检测子系统框图 
水位检测子系统框图 (3)PH检测子系统框图1、PH检测子系统框图 
PH检测子系统框图 2、程序的设计(1)程序功能描述与设计思路1、程序功能描述 根据题目要求软件部分主要实现键盘的设置和显示。 1)键盘实现功能:设置频率值、频段、电压值以及设置输出信号类型。 2)显示部分:显示电压值、频段、步进值、信号类型、频率。 2、程序设计思路 (2)程序流程图1、主程序流程图 2、水位检测子程序流程图 
3、PH检测子程序流程图 
4、电压检测子程序流程图 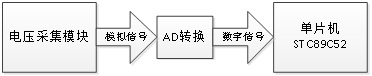
四、测试方案与测试结果1、测试方案(1)硬件测试 搭建基本框架,将各个模块连接在STC89C52单片机上。 (2)软件仿真测试 根据题目要求,用ISIS仿真软件画出原理图,进行仿真。 (3)硬件软件联调 将总程序录在STC89C52单片机芯片中,把所有需要的元器件都接在系统上,测试各部分功能。 2、测试条件与仪器测试条件:检查多次,仿真电路和硬件电路必须与系统原理图完全相同,并且检查无误,硬件电路保证无虚焊。 测试仪器:水位传感器、PH传感器、钢尺、PH试纸、万用表。 3、测试结果及分析(1)测试结果 经PH计和PH试纸、钢尺、和万用表检测结果与水位、PH、电压传感器检测结果的对比,误差均没有超过题目要求的最大允许误差。
(2)测试分析与结论根据测试数据,可以得出以下结论: 1、加入液体后,在1分钟内可以完成水位测量并显示,误差小于5mm。 3、电池组输出电压可以准确测量并显示,误差不大于0.01V。 综上所述,本设计达到设计要求。
附录1:电路原理图

单片机源程序如下:
| 



 [复制链接]
[复制链接]





 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩

