《智能仪器仪表设计与调试》课程设计报告
课程设计任务书 设计题目:基于单片机的波形发生器设计 |
| | | | | | | |
| | 1.要求设计的波形发生器完成以下功能: 1)运用单片机控制产生多种波形,这些波形包括三角波、方波、锯齿波等。 2)信号发生器所产生的波形的频率、幅值均为连续可调。 2. 扩展功能 1)在上位机将波形实时显示出来。 2)用红外线遥控器实现上述功能。 3)其它功能 | | | | 1. 布置仪表设计任务、方案设计 (1天) 2. 硬件设计、制作、调试 (1天) 3. 软件设计、调试 (5天) 4. 综合测试 (1天) 5. 成果展示、答辩 (1天) 6. 撰写报告 (1天) 详见进度安排表 | | - 程德福.智能仪器.机械工业出版社. 2009.9
- 胡文金. 单片机系统实训教程.重庆:重庆大学出版社,2005
- 梁森. 自动检测技术及应用.北京:机械工业出版社,2012
| |
| | 1.本表应在每次实施前一周由负责教师填写二份,院系审批后交院系办备案,一份由负责教师留用。2.若填写内容较多可另纸附后。3.一题多名学生共用的,在设计内容、参数、要求等方面应有所区别。 |
系主任: 指导教师:
目录
一、 设计任务和性能指标 1.1 设计任务 1.2 性能指标 二、设计方案 2.1硬件选择 2.2 系统总体设计 三、系统硬件设计 3.1 单片机的最小系统 3.2 按键电路设计 3.3 LCD显示的设计 四、系统软件设计 4.1 主程序设计 4.2 LCD显示子程序设计 4.3 D/A转换子程序设计 五、调试及性能分析 5.1 调试步骤 5.2 性能分析 六、心得体会 参考文献 附录 1 系统硬件电路图 附录 2 程序代码
一、 设计任务和性能指标
1.1 设计任务按要求设计波形发生器并完成相关功能: (1)运用单片机控制产生多种波形,这些波形包括三角波、方波、锯齿波等。 (2)信号的发生器所产生波形的频率、幅值均为连续可调。 扩展功能 在上位机将波形实时显示出来,用红外线遥控器实现上述功能,其它功能。 1.2 性能指标 (1)幅值0~5V可调 (2)频率0~1KHz可调
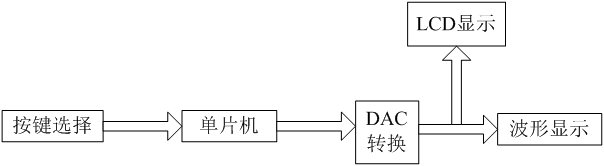
二、设计方案 采用AT89C51单片机和数模转换器PCF8591实现波形的产生。波形的产生方法是用AT89C51单片机执行波形程序,向PCF8591转换器的输入端输入相应的数据,从而在DA转换电路输出端再通过运放电路转换得到相应的电压波形。在AT89C51的P1口接按键控制波形的各类和波形的频率,每种波形对应一种按键方式。此方案原理简单,同时适合操作,实现起来也相对较容易。产生的三种波形的频率可由按键控制,并通过按键改变来转换不同的波形,也能够在示波器上显示出所要求的波形。波形的频率步进也可以实现调节,具有线路简单、可行性高、符合设计要求等优点。加上LCD数码显示管,从而能够在LCD上显示出频率值、幅度值信息。输出的波形也较稳定,精度较高,通过滤波电路使得系统的抗干扰性增强,电路简单,性价比高。
图2.1系统组成结构框图
2.1硬件选择 (1)单片机:STC12C5AI6S2是高速/低功耗/超强抗干扰的新一代8051 单片机,指令代码完全兼容传统8051,但速度快8-12倍。内部集成MAX810 专用复位电路,2路PWM,8路高速10位A/D转 换(250K/S),针对电机控制,强干扰场合。 (2)PCF8591:PCF8591是一个单片集成、单独供电、低功耗、8-bit CMOS数据获取器件。PCF8591具有4个模拟输入、1个模拟输出和1个串行I2C总线接口。PCF8591的3个地址引脚A0, A1和A2可用于硬件地址编程,允许在同个I2C总线上接入8个PCF8591器件,而无需额外的硬件。在PCF8591器件上输入输出的地址、控制和数据信号都是通过双线双向I2C总线以串行的方式进行传输。
2.2 系统总体设计 本系统是用单片机来控制波形的转换以及幅值和频率的改变的,所以该系 统可以分为4个电路模块 ,下面是总体设计框图。
图2.2 系统总体设计框图
三、系统硬件设计
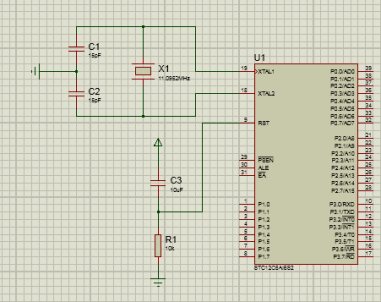
3.1 单片机的最小系统 由于单片机最小系统只需要外围有时钟电路和复位电路即可,则单片机最小系统有着两个外围电路即可正常工作,下面是单片机的最小系统原理图。
图3.1 STC12C5AI6S2单片机最小系统
3.2 按键电路设计本实现采用4个按键来进行波形的转换、幅值的改变、频率的改变,P20键用来改变波P21、P22用来改变幅值的大小,P32用来改变频率的大小,下面是按键电路图。 图3.2按键电路图
3.3 LCD显示的设计 本硬件采用的是12864-12L的液晶显示屏,显示屏将波形的转化显示在显示屏上,下面是 液晶显示的电路。
图3.3 12864-12L液晶显示电路
四、系统软件设计
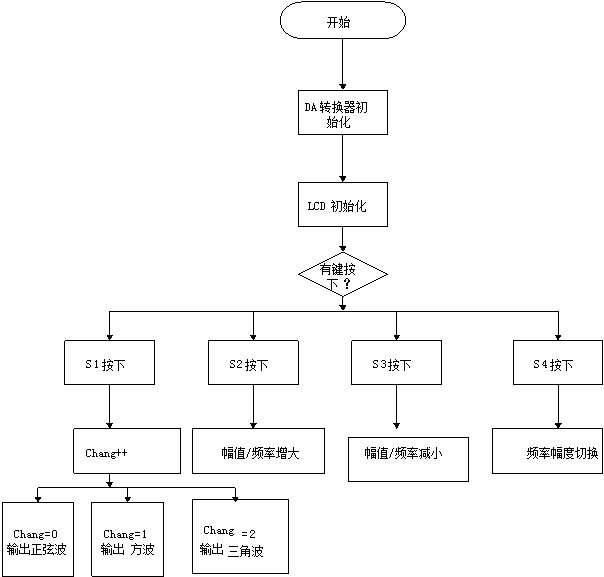
4.1 主程序设计 主程序内进行的是波形的切换及幅值、频率的改变,用示波器和LCD显示,将主要的写进即可,其他的就写在外面,下面是主程序流程图。
图4.1 主程序流程图
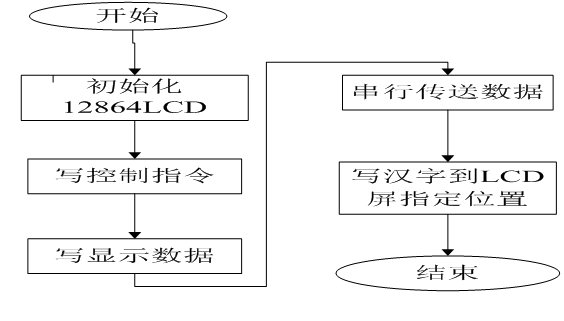
4.2 LCD显示子程序设计液晶显示的程序在本程序中比较的简单,就是为了实时的显示出当前的波形是什么,用按键切换之后液晶显示也跟着变。液晶显示程序需首先初始化,再进行数据的传输,并进行字符的显示,所以写出相应的几个程序即可进行LCD的显示。
图4.2 LCD 显示流程图 4.3 D/A转换子程序设计本程序采用PCD8591来作D/A转换器,需要将A1、A1、A2接地,单片机上的P1和P11接PCF8591上的SCL和SDA端口,AOUT接示波器,供显示D/A转换要满足I2C协议才能进行数据的传输。
void write_add(uchar date) { start(); write_byte(0x90); respons(); write_byte(0x40); respons(); write_byte(date); respons(); stop();
}
五、调试及性能分析
5.1 调试步骤硬件调试:检查线路连接有无错误,SDA和SCL接单片机的P10和P11口,VCC接电源,CND接地,AOUT接示波器,在下载数据到单片机之后数据在传输的时候PCF8591上的一个蓝色的灯会不停的闪,说明有数据在传输,否则无数据传输。 软件调试:首先看I2C协议是否正确,否则不能传输数据,再看按键的逻辑关系是否正确,还有就是LCD的显示是否正确。 调节电源,使其输出5V电压,调整好示波器。给电路供电,观察示波器,记录各频段对应波形的情况,峰峰值。调试结果表明,该电路在要求频率范围内的大部分频率范围基本上不失真,除了在最高频率的最低频率有少许失真,其中,当频率接近10KHz时,方波高低电压跃变时出现毛刺,审过零比较器的频率特性所致,另外,在最高频和最低频段,三角波出现少许弯斜,可选用频率特性更为宽的电容进行校正。
5.2 性能分析 经过一段时间运行后,可以对系统的性能进行测试。对于本波形发生器来说,用示波器可以测试其性能指标,按前面所述设计的波形发生器,能产生正弦波、三角波及方波信号,其幅值可以0—5V内变化,频率也可以调整。
六、心得体会 在为期几周的时间里,终于顺利地完成了此次课程设计,并从中学习到了很多的知识和经验,对单片机以及C语言有了更深刻的了解。本次课程设计也发现了许多问题,此次单片机的设计硬件电路较为简单,而程序的设计在当中占据很重要的部分。这次课程设计是用STC12C5AI6S2单片机与PCF8591D/A转换器来实现的波形产生与显示,所以要对这两个模块非常的熟悉。对于PCF8591需要深入的认识I2C协议的内容才能正确的传输数据。而对于单片机而需要对各个接口非常熟悉,才能保证数据的正常传输。此外还要熟练的使用示波器,对产生的波形进行调整,来得到更好的效果。它考验我们灵活的运用所学知识,培养了我们在遇到问题善于触屏的良好学习态度,使我认识到设计思路更节省了时间。灵活运用,以书本知识为基础灵活的扩展,学习前人的验,向高层次迈进。当然还是存在不足的地方,例如当频率过小的时候矩形波会有些失真,转换器转换可以加一个锁存器,放大电路设计上还有待进一步改进,使其具有更强的输出能力等。
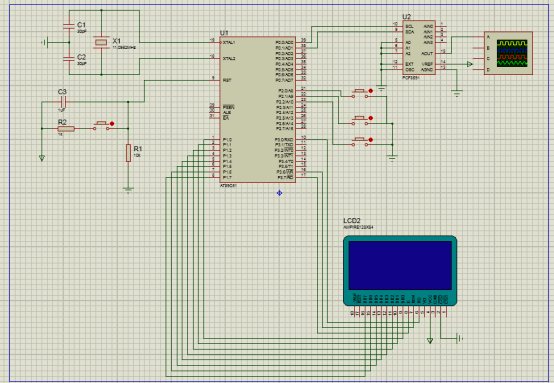
附录 1 系统硬件电路图
单片机源程序如下: - #include<reg51.h>
- #include<intrins.h>
- #include<math.h>
- #define uchar unsigned char
- #define uint unsigned int
- unsigned long Result,i;
- sbit SDA=P1^1; //PCF8591 接口
- sbit SCL=P1^0;
- unsigned int a=0; //波形采样点值
- unsigned int b=0;
- unsigned int c=0;
-
- unsigned int bx_chang=0;
- unsigned int n=40; //频率计算值
- unsigned char TH;
- unsigned char TL;
- unsigned int mode=0; //0为调节幅度 1为调节频率
- unsigned int fd=6; //幅度初值 3.0V
- unsigned int x; //采样点的间隔
- unsigned int u; //lcd刷屏变量
- //*************
- sbit CS =P3^5; //LCD接口
- sbit SID=P3^6;
- sbit SCLK=P3^7;
- sbit PSB=P1^5;
- //*************
- sbit p20=P2^0; //波形调节
- sbit p21=P2^1; //增加 频率、幅度
- sbit p22=P2^2; //减少 频率、幅度
- sbit p32=P3^2; //频率幅度选择
-
- //sin波形数组
- uchar code tosin[256]={
- 0x80,0x83,0x86,0x89,0x8D,0x90,0x93,0x96,0x99,0x9C,0x9F,0xA2,0xA5,0xA8,0xAB,0xAE,
- 0xB1,0xB4,0xB7,0xBA,0xBC,0xBF,0xC2,0xC5,0xC7,0xCA,0xCC,0xCF,0xD1,0xD4,0xD6,0xD8,
- 0xDA,0xDD,0xDF,0xE1,0xE3,0xE5,0xE7,0xE9,0xEA,0xEC,0xEE,0xEF,0xF1,0xF2,0xF4,0xF5,
- 0xF6,0xF7,0xF8,0xF9,0xFA,0xFB,0xFC,0xFD,0xFD,0xFE,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,
- 0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFE,0xFD,0xFD,0xFC,0xFB,0xFA,0xF9,0xF8,0xF7,0xF6,
- 0xF5,0xF4,0xF2,0xF1,0xEF,0xEE,0xEC,0xEA,0xE9,0xE7,0xE5,0xE3,0xE1,0xDF,0xDD,0xDA,
- 0xD8,0xD6,0xD4,0xD1,0xCF,0xCC,0xCA,0xC7,0xC5,0xC2,0xBF,0xBC,0xBA,0xB7,0xB4,0xB1,
- 0xAE,0xAB,0xA8,0xA5,0xA2,0x9F,0x9C,0x99,0x96,0x93,0x90,0x8D,0x89,0x86,0x83,0x80,
- 0x80,0x7C,0x79,0x76,0x72,0x6F,0x6C,0x69,0x66,0x63,0x60,0x5D,0x5A,0x57,0x55,0x51,
- 0x4E,0x4C,0x48,0x45,0x43,0x40,0x3D,0x3A,0x38,0x35,0x33,0x30,0x2E,0x2B,0x29,0x27,
- 0x25,0x22,0x20,0x1E,0x1C,0x1A,0x18,0x16,0x15,0x13,0x11,0x10,0x0E,0x0D,0x0B,0x0A,
- 0x09,0x08,0x07,0x06,0x05,0x04,0x03,0x02,0x02,0x01,0x00,0x00,0x00,0x00,0x00,0x00,
- 0x00,0x00,0x00,0x00,0x00,0x00,0x01,0x02,0x02,0x03,0x04,0x05,0x06,0x07,0x08,0x09,
- 0x0A,0x0B,0x0D,0x0E,0x10,0x11,0x13,0x15,0x16,0x18,0x1A,0x1C,0x1E,0x20,0x22,0x25,
- 0x27,0x29,0x2B,0x2E,0x30,0x33,0x35,0x38,0x3A,0x3D,0x40,0x43,0x45,0x48,0x4C,0x4E,
- 0x51,0x55,0x57,0x5A,0x5D,0x60,0x63,0x66,0x69,0x6C,0x6F,0x72,0x76,0x79,0x7C,0x80
- };
-
-
- //***********************************************
-
- void delay(unsigned int z) //延迟函数
- { unsigned int x,y;
- for(x=z;x>0;x--)
- for(y=125;y>0;y--) ;
- }
- //***************************************************LCD显示函数组
- void SendByte(unsigned char Dbyte) //LCD字节传送
- {
- unsigned char i;
- CS=1;
- for(i=0;i<8;i++)
- { SCLK = 0;
- if((Dbyte<<i)&0x80)
- SID=1;
- else
- SID=0;
- SCLK = 1;
- SCLK = 0;
- }
- CS=0;
- }
-
- void Lcd_WriteCmd(unsigned char Cbyte ) //LCD的数据与指令传送
- {
- delay(10);
- SendByte(0xf8);
- SendByte(0xf0&Cbyte);
- SendByte(0xf0&(Cbyte<<4));
- }
-
- void Lcd_WriteData(unsigned char Dbyte )
- {
- delay(10);
- SendByte(0xfa);
- SendByte(0xf0&Dbyte);
- SendByte(0xf0&(Dbyte<<4));
- }
- void InitLCD() //LCD初始化
- {
- Lcd_WriteCmd(0x30);
- Lcd_WriteCmd(0x06);
- Lcd_WriteCmd(0x0c);
- Lcd_WriteCmd(0x04);
- Lcd_WriteCmd(0x01);
- Lcd_WriteCmd(0x02);
- Lcd_WriteCmd(0x80);
- }
- void xianshi(unsigned char x,unsigned char y,unsigned char *stri) //LCD数据传送地址
- {
- if(x==1) Lcd_WriteCmd(0x80+y-1);
- else if(x==2) Lcd_WriteCmd(0x90+y-1);
- else if(x==3) Lcd_WriteCmd(0x88+y-1);
- else if(x==4) Lcd_WriteCmd(0x98+y-1);
- while(*stri>0)
- {
- Lcd_WriteData(*stri);
- stri++;
- }
- }
- //****************************************************
-
- void delayp() //延迟函数
- {;;}
-
-
- void delay_1ms(uint z)
- {
- uint x,y;
- for(x=z;x>0;x--)
- for(y=110;y>0;y--)
- ;
- }
- //****************************************I2C协议
- void start()//开始信号
- {
- SDA=1;
- delayp();
- SCL=1;
- delayp();
- SDA=0;
- delayp();
- }
-
- void stop() //停止信号
- {
- SDA=0;
- delayp();
- SCL=1;
- delayp();
- SDA=1;
- delayp();
- }
-
-
- void respons()//应答 相当于一个智能的延时函数
- {
- uchar i;
- SCL=1;
- delayp();
- while((SDA==1)&&(i<250))
- i++;
- SCL=0;
- delayp();
- }
-
- void init() //初始化
- {
- SDA=1;
- delayp();
- SCL=1;
- delayp();
- }
-
- void write_byte(uchar date) //写一字节数据
- {
- uchar i,temp;
- temp=date;
- for(i=0;i<8;i++)
- {
- temp=temp<<1; //左移一位 移出的一位在CY中
- SCL=0; //只有在scl=0时sda能变化值
- delayp();
- SDA=CY;
- delayp();
- SCL=1;
- delayp();
- }
- SCL=0;
- delayp();
- SDA=1;
- delayp();
- }
-
-
-
- void write_add(uchar date) //D/A转换
- {
- start();
- write_byte(0x90);
- respons();
- write_byte(0x40);
- respons();
- write_byte(date);
- respons();
- stop();
-
- }
- //****************************************************
-
- int main()//************************************************主函数
- {
- TMOD = 0x01;
- TH0 = (65536-99000/n)/256; //定时时间
- TL0 = (65536-99000/n)%256;
- TH1 = (65536-5000)/256;
- TL1 = (65536-5000)%256;
- EA = 1;
- ET0 = 1;
- ET1 = 1;
- TR0 = 1;
- TR1 = 1;
- init();
- while(1)
- {
- PSB=0;
- InitLCD();
- //*******************************************显示模块
- for(u=0;u<9;u++)
- {
- xianshi(1,1,"信号发生器");
- xianshi(2,1,"波形:");
-
- if(bx_chang==0) xianshi(2,4,"sin");
- if(bx_chang==1) xianshi(2,4,"Square");
- if(bx_chang==2) xianshi(2,4,"Triangle");
- if(mode==0)
- {
- xianshi(3,1,"幅度:");
- Lcd_WriteData(0x30+(fd*5/10));
- xianshi(3,5,".");
- Lcd_WriteData(0x30+(fd*5%10));
- xianshi(3,6,"V");
- }
- if(mode==1)
- {
- xianshi(3,1,"频率:");
- Lcd_WriteData(0x30+(n/2/100));
- Lcd_WriteData(0x30+(n/2/10));
- Lcd_WriteData(0x30+(n/2%10));
- xianshi(3,8,"HZ");
- }
- }
- }
- }
-
- //**************************************************************8
- void refresh_f( void ) interrupt 1 //定时器中断
- {
-
- if(n>=0&&n<40)
- { x=14;
- TH0 = (65536-92900/n)/256;
- TL0 = (65536-92900/n)%256;
- }
- else if (n>=40&&n<80)
- { x=15;
- TH0 = (65536-97920/n)/256;
- TL0 = (65536-97920/n)%256;
- }
-
-
- //*************************************正弦波形
- a=a+x;
- if(a<256&&bx_chang==0)
- {
- write_add(tosin[a]*0.1*fd);
-
- }
- if(a>=256)
- {
- a=0;
- }
-
- //************************************方波波形
-
- b=b+x;
- if(b<128&&bx_chang==1)
- {
- write_add(0x00*0.1*fd);
-
- }
- if(b>=128&&b<256&&bx_chang==1)
- write_add(0xff*0.1*fd);
- if(b>=256)
- {
- b=0;
- }
-
-
-
-
- //*************************************三角波波形
- c=c+x;
-
- if(c<128&&bx_chang==2)
-
- {
-
- write_add(c*0.2*fd);
- }
- if(c>=128&&c<256&&bx_chang==2)
- write_add((-c+256)*0.2*fd);
-
-
- if(c>=256)
- {
- c=0;
- }
-
- }
- //********************************************定时器中断 按键中断
- void refresh_zd( void ) interrupt 3
- {
-
- TH1 = (65536-5000)/256; //5000us
- TL1 = (65536-5000)%256;
- //*******************************************8
- if(p32==0) //频率或者幅度调节选择
- {
-
- delay_1ms(1000);
- if(p32==0)
- mode=mode+1;
- if(mode>=2)
- mode=0;
-
- }
- if(p20==0) //波形选择
- {
- delay_1ms(1000);
- bx_chang=bx_chang+1;
- if(bx_chang>=3)
- bx_chang=0;
-
- }
- //*******************************************频率调节
- if(p21==0&&mode==1)
- {
- delay_1ms(1000);
- n=n+2;
- if(n>=120)
- n=1;
-
- }
- if(p22==0&&mode==1)
- {
- delay_1ms(1000);
- n=n-2;
- if(n<=0)
- n=120;
-
- }
- //*******************************************幅度调节
- if(p21==0&&mode==0)
- {
- delay_1ms(1000);
- fd=fd+1;
- if(fd>=10)
- fd=1;
-
- }
- if(p22==0&&mode==0)
- {
- delay_1ms(1000);
- fd=fd-1;
- if(fd<=1)
- fd=10;
-
- }
- }
所有资料51hei提供下载:
|




 [复制链接]
[复制链接]









 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩

