0度到24度电机不运行,25开始运行,50度全速运行,0度以下反转
电路原理图如下:
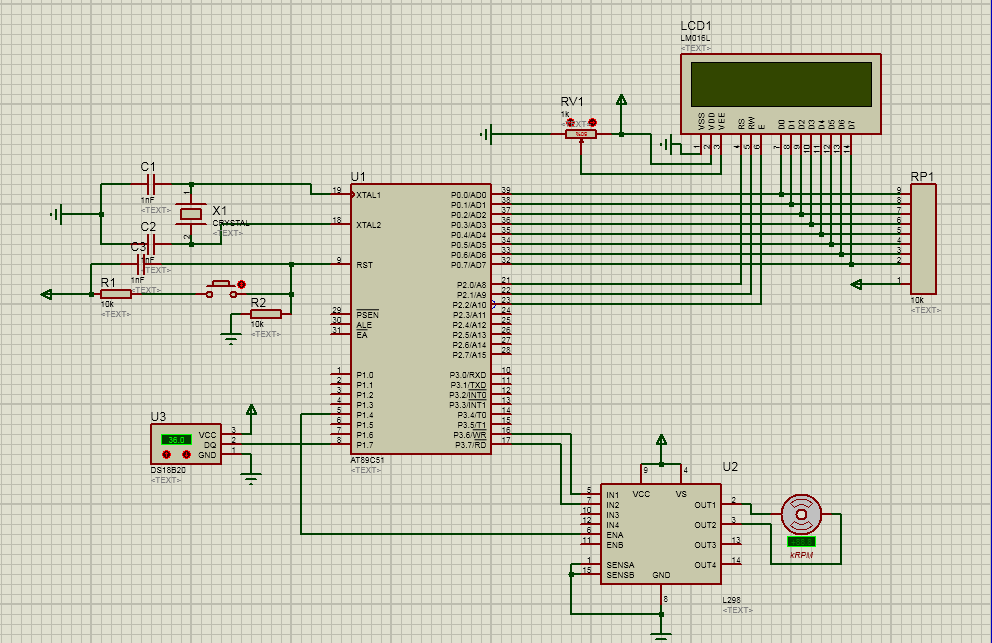
代码如下:
#include<reg51.h> //预处理命令,定义SFR的头文件 #include <math.h> #define uchar unsigned char //定义缩写字符uchar #define uint unsigned int //定义缩写字符uint #define lcd_data P0 //定义LCD1602接口 P0 sbit DQ =P1^7; //将DQ位定义为P1.7引脚 sbit lcd_RS=P2^0; //将RS位定义为P2.0引脚 sbit lcd_RW=P2^1; //将RW位定义为P2.1引脚 sbit lcd_EN=P2^2; //将EN位定义为P2.2引脚 sbit PWM=P3^7; //将PWM定义为P3.7引脚 sbit D=P3^6; //将d定义为P3.6引脚,转向选择位 uchar t[2],speed,temperature; //用来存放温度值,测温程序就是通过这个数组与主函数通信的 uchar DS18B20_is_ok; ucharTempBuffer1[12]={0x20,0x20,0x20,0x20,0xdf,0x43,'\0'}; uchartab[16]={0x20,0x20,0x20,0x54,0x20,0x4d,0x6f,0x6e,0x69,0x74,0x6f,0x72,'\0'}; //显示"T Monitor" /**********lcd显示子程序************/ voiddelay_20ms(void) /*延时20ms函数*/ { uchar i,temp; //声明变量i,temp for(i = 20;i > 0;i--) //循环 { temp = 248; //给temp赋值248 while(--temp); //temp减1是否等于0,否则继续执行该行 temp = 248; //给temp赋值248 while(--temp); //temp减1是否等于0,否则继续执行该行 } } void delay_38us(void) /*延时38us函数*/ { uchar temp; //声明变量temp temp = 18; //给temp赋值 while(--temp); //temp减1是否等于0,否则继续执行该行 } void delay_1520us(void) /*延时1520us函数*/ { uchar i,temp; //声明变量i,temp for(i = 3;i > 0;i--) //循环 { temp = 252; //给temp赋值 while(--temp); //temp减1是否等于0,否则继续执行该行 } } uchar lcd_rd_status( ) /*读取lcd1602的状态,主要用于判断忙*/ { uchar tmp_sts; //声明变量tmp_sts lcd_data = 0xff; //初始化P3口 lcd_RW = 1; //RW =1 读 lcd_RS = 0; //RS =0 命令,合起来表示读命令(状态) lcd_EN = 1; //EN=1,打开EN,LCD1602开始输出命令数据,100nS之后命令数据 //100nS之后命令数据有效 tmp_sts = lcd_data; //读取命令到tmp_sts lcd_EN = 0; //关掉LCD1602 lcd_RW = 0; //把LCD1602设置成写 return tmp_sts; //函数返回值tmp_sts } void lcd_wr_com(uchar command ) /*写一个命令到LCD1602*/ { while(0x80&lcd_rd_status()); //先判断LCD1602是否忙,看读出的命令的最高位是否为1, //为1表示忙,继续读,直到不忙 lcd_RW = 0; lcd_RS = 0; //W=0,RS=0 写命令 lcd_data = command; //需要写的命令写到数据线上 lcd_EN = 1; lcd_EN = 0; //EN输出高电平脉冲,命令写入 } void lcd_wr_data(uchar sjdata ) /*写一个显示数据到lcd1602*/ { while(0x80&lcd_rd_status()); //判断1602是否忙,最高位为1表示忙,继续读,直到不忙 lcd_RW = 0; lcd_RS = 1; //RW=0,RS=1 写显示数据 lcd_data = sjdata ; //把需要写的显示数据写到数据线上 lcd_EN = 1; lcd_EN = 0; //EN输出高电平脉冲,命令写入 lcd_RS = 0; } void Init_lcd(void) /*初始化lcd1602*/ { delay_20ms(); //调用延时 lcd_wr_com(0x38); //设置16*2格式,5*8点阵,8位数据接口 delay_38us(); //调用延时 lcd_wr_com(0x0c); //开显示,不显示光标 delay_38us(); //调用延时 lcd_wr_com(0x01); //清屏 delay_1520us(); //调用延时 lcd_wr_com(0x06); //显示一个数据后光标自动+1 } void GotoXY(uchar x, uchar y) //设定位置,x为行,y为列 { if(y==0) //如果y=0,则显示位置为第一行 lcd_wr_com(0x80|x); if(y==1) lcd_wr_com(0xc0|x); //如果y=1,则显示位置为第二行 } void Print(uchar *str) //显示字符串函数 { while(*str!='\0') //判断字符串是否显示完 { lcd_wr_data(*str); //写数据 str++; } } void LCD_Print(uchar x, uchar y, uchar*str) //x为行值,y为列值,str是要显示的字符串 { GotoXY(x,y); //设定显示位置 Print(str); //显示字符串 } /*****************系统显示子函数*****************/ void covert1() //温度转化程序 { uchar x=0x00; //变量初始化 if(t[1]>0x07) //判断正负温度 { TempBuffer1[0]=0x2d; //0x2d为"-"的ASCII码 t[1]=~t[1]; //负数的补码 t[0]=~t[0]; //换算成绝对值 x=t[0]+1; //加1 t[0]=x; //把x的值送入t[0] if(x>255) //如果x大于255 t[1]++; //t[1]加1 } else TempBuffer1[0]=0x2b; //0xfe为变"+"的ASCII码 t[1]<<=4; //将高字节左移4位 t[1]=t[1]&0x70; //取出高字节的3个有效数字位 x=t[0]; //将t[0]暂存到X,因为取小数部分还要用到它 x>>=4; //右移4位 x=x&0x0f; //和前面两句就是取出t[0]的高四位 t[1]=t[1]|x; //将高低字节有效值的整数部分拼成一个字节 temperature=t[1]; TempBuffer1[1]=t[1]/100+0x30; //加0x30为变 0~9 ASCII码 if(TempBuffer1[1]==0x30) //如果百位为0 TempBuffer1[1]=0xfe; //百位数消隐 TempBuffer1[2]=(t[1]%100)/10+0x30; //分离出十位 TempBuffer1[3]=(t[1]%100)%10+0x30; //分离出个位 } /*******************DS18B20函数**********************/ void delay_18B20(uint i) //延时程序 { while(i--); } void Init_DS18B20(void) //ds18b20初始化函数 { ucharx=0; DQ =1; //DQ复位 delay_18B20(8); //稍做延时 DQ =0; //单片机将DQ拉低 delay_18B20(80); //精确延时大于480us DQ =1; //拉高总线 delay_18B20(14); x=DQ; //延时后如果x=0则初始化成功 x=1则失败 delay_18B20(20); } uchar ReadOneChar(void) //ds18b20读一个字节函数 { unsignedchar i=0; unsignedchar dat0 = 0; for(i=8;i>0;i--) { DQ= 0; //读前总线保持为低 dat0>>=1; DQ= 1; //开始读总线释放 if(DQ) //从DS18B20总线读得一位 dat0|=0x80; delay_18B20(4); //延时一段时间 } return(dat0); //返回数据 } void WriteOneChar(uchar dat1) //ds18b20写一个字节函数 { uchari=0; for(i=8; i>0; i--) { DQ= 0; //开始写DS18B20总线要处于复位(低)状态 DQ= dat1&0x01; //写入下一位 delay_18B20(5); DQ = 1; //重新释放总线 dat1>>=1; //把一个字节分成8个BIT环移给DQ } } void ReadTemperature() //读取ds18b20当前温度 { delay_18B20(80); //延时一段时间 Init_DS18B20(); WriteOneChar(0xCC); //跳过读序号列号的操作 WriteOneChar(0x44); //启动温度转换 delay_18B20(80); //延时一段时间 Init_DS18B20(); //DS18B20初始化 WriteOneChar(0xCC); //跳过读序号列号的操作 WriteOneChar(0xBE); //读取温度寄存器等(共可读9个寄存器) delay_18B20(80); //延时一段时间 t[0]=ReadOneChar(); //读取温度值低位 t[1]=ReadOneChar(); //读取温度值高位 } void delay_motor(uchar i) //延时函数 { ucharj,k; //变量i、k为无符号字符数据类型 for(j=i;j>0;j--) //循环延时 for(k=200;k>0;k--); //循环延时 } /*******************电机转动程序*******************/ void motor(uchar tmp) { uchar x; if(TempBuffer1[0]==0x2b) //温度为正数 { if(tmp<25) //温度小于25度 { D=0; //电机停止转动 PWM=0; } else if(tmp>50) //温度大于50度,全速转动 { D=0; //D置0 PWM=1; //正转,PWM=1 x=250; //时间常数为x delay_motor(x); //调延时函数 PWM=0; //PWM=0 x=5; //时间常数为x delay_motor(x); //调延时函数 } else { D=0; //D置0 PWM=1; //正转,PWM=1 x=5*tmp; //时间常数为x delay_motor(x); //调延时函数 PWM=0; //PWM=0 x=255-5*tmp; //时间常数为255-x delay_motor(x); //调延时函数 } } else if (TempBuffer1[0]==0x2d) //温度小于0,反转 { D=1; PWM=0; //PWM=0 x=5*tmp; //时间常数为tmp delay_motor(x); //调延时函数 PWM=1; //PWM=1 x=255-5*tmp; //时间常数为255- tmp delay_motor(x); //调延时函数 } } void delay(unsigned int x) //延时函数名 { unsigned char i; //定义变量i的类型 while(x--) //x自减1 { for(i=0;i<123;i++){;} //控制延时的循环 } } /*************************main主程序*********************/ void main(void) { delay_20ms(); //系统延时20ms启动 ReadTemperature(); //启动DS18B20 Init_lcd(); //调用LCD初始化函数 LCD_Print(0,0,tab); //液晶初始显示 delay(1000); //延时一段时间 while(1) { ReadTemperature(); //读取温度并存放在一个两个字节的数组中 delay_18B20(100); covert1(); //数据转化 LCD_Print(4,1,TempBuffer1); //显示温度 motor(temperature); //电机转动 } }
全部资料51hei下载地址:
 基于51单片机的温度控制直流电机的转动.rar
(73.85 KB, 下载次数: 132)
基于51单片机的温度控制直流电机的转动.rar
(73.85 KB, 下载次数: 132)
| 








 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩

