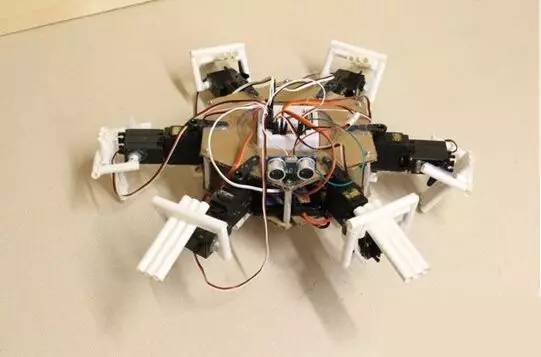
这是仿生机器人,它是由外运行的EZ -B的12舵机,使用的脚本EZ-机器人的六足机器人。
步骤1:供应
建立这个,需要:
一块纸板,至少可以有2张 20厘米x 20厘米的正方形
12个标准180度舵机
12伺服杆连接东西
2-3包纸奶昔吸管(大的)
1包标准尺寸的纸吸管
Ez-b和电源外壳
1个7.2伏锂聚合物电池
1个超声波传感器
堆支架(吸管可以用于这些的地方)
12机器螺丝(如果支架的尺寸一样)(只需要使用支架)
步骤2:工具
建立这个,需要:
——热胶枪和胶棒
——一个钻和钻头
——记号笔或铅笔
——用美工刀或其他某种方式削减吸管
——十字螺丝刀
——扁头螺丝刀
——台或桌子
——安装了Ez-builder 的电脑
步骤3:构建基础1
注意:如果在支座处用吸管对步骤3至5是不利的。步骤2到5必须重复为两个六边形。
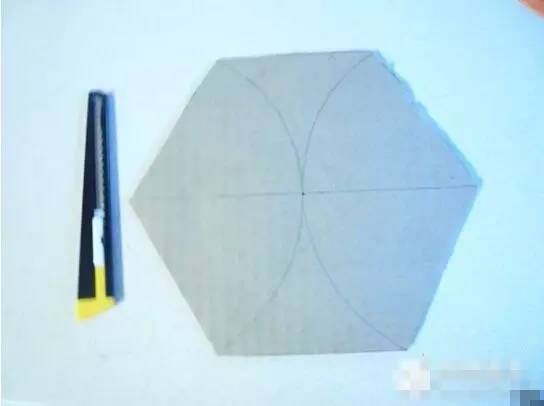
1、通过切割两个相同的10厘米边长的六边形开始。(如果你不知道怎么做,可以谷歌)
2、擦除线
3、从六边形两侧开始测量1.5厘米。
4、连接线和标记的中间。
5、在每一行的中间钻一个孔(这是非常重要的,孔勉强适合这个机器的螺丝钉,如果太大,螺丝头就会滑落)
步骤4:构建基础2
注意:步骤7A是支架和步骤7B是用于吸管。
6、附加一些支架在一起,或者减少一些冰沙/大吸管,有6个,每个4.7厘米长。
7a、把一台机器螺钉穿过每个孔,并用支架连接在一起。
7b、胶水的吸管的目的集中在中间线绘制
基本已经完成。
第五步:添加伺服系统1
1、中心每个伺服和螺旋伺服武器。(确保它们是直接指向远离伺服)
2、切6块大吸管,每个0.6至0.7厘米的长度并用胶水把它们粘到伺服系统,正好相反位伸出伺服。
3、找到中间的每一个侧面。
4、胶臂连接的伺服系统,因此只有标签的伺服在基地。 (这边是顶部)
5、切成6块大吸管,每9厘米的长度和6块定期吸管每1厘米的长度。
6、用胶水把1个 1 1厘米的一根吸管粘到每个9厘米的吸管最后保持在90度。
7、翻转机器人,并插入每个1厘米的吸管到每个0.6厘米的吸管和拉9厘米的吸管朝向底座中间的另一端并用胶水粘住(重复每个伺服)
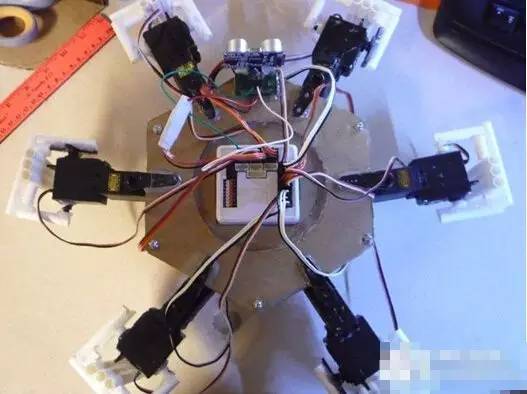
步骤6:添加伺服系统2

1、切割6个0.6或0.7厘米的大吸管并用胶水粘到他们相反的可移动件上(同以前一样)
2、胶水把第一组和第二组伺服系统通过粘合,这样伸出两侧联锁的标签。(见上图)
3、在根部,你可以使用任何你想要的东西,主要原则是他们应该高约8厘米宽3厘米x 1-2厘米厚。
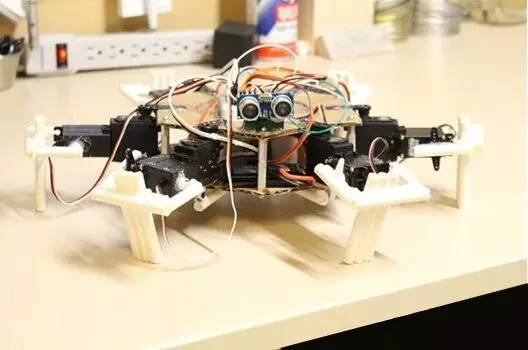
4、现在伺服系统已添加。
第七步:添加Ez-B
1、在基地的ez-b.顶部挖一个勉强够大的洞。
2、坚持EZ-B和电源外壳和插件在伺服器里。
3、把超声波传感器粘在底座上(把一个乐高片放在传感器和底座之间,就像一个隔块,一个更容易连接的方法)现在六足机器人完成。
| 











 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩

