ФПТМ
1ЁЂЯюФПашЧѓЗжЮі 2
11ЁЂЯюФПФПБъвтвх 2
12ЁЂЙІФмашЧѓЗжЮі 2
13ЁЂЯЕЭГПЊЗЂЛЗОГЁЂЙЄОпашЧѓЗжЮігыбЁдё 2
14ЁЂЗЧЙІФмадашЧѓЗжЮі 2
2ЁЂЯюФПгВМўЯЕЭГНсЙЙ 2
21ЁЂ ЯЕЭГЗНАИдРэЭМ 2
22ЁЂAT89C51дРэНщЩм 2
23 ЁЂЙтЕчПЊЙиФЃПщдРэ 3
24ЁЂБЈОЏФЃПщдРэ 4
25ЁЂАДМќФЃПщдРэ 4
26ЁЂЪ§ТыЙмЯдЪОФЃПщдРэ 5
27ЁЂДцДЂФЃПщдРэ 5
28ЁЂДЋЫЭДјЕчЛњЧ§ЖЏФЃПщдРэ 6
3ЁЂЯЕЭГШэМўЬхЯЕМмЙЙ 6
31 ЯюФПШэМўЯЕЭГзмМмЙЙЭМ 6
32 ЯдЪОзгФЃПщСїГЬЭМ 9
33 живЊЕФЪ§ОнНсЙЙЁЂВЮЪ§КЭКЏЪ§ЗжЮі 12
4ЁЂЯюФПдЫаааЇЙћеЙЪО 13
5ЁЂзмНсгыаФЕУЬхЛс 14
6ЁЂИНТМ 15
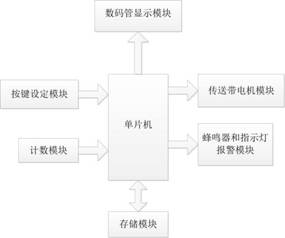
1ЁЂЯюФПашЧѓЗжЮі 1.1ЁЂЯюФПФПБъвтвх ЙЄвЕЩњВњжаЃЌКмЖрСьгђашвЊздЖЏЭГМЦВњЦЗЕФЪ§СПЃЌЛљгкЙтЕчПЊЙиКЭAT89C51ЕЅЦЌЛњПЊЗЂЕФДЋЫЭДјМЦЪ§ЦїЭъУРНтОіСЫДЋЫЭДјЩЯУцдЫЫЭЕФВњЦЗашвЊШЫЙЄМЦЪ§ЕФЗГФеЃЌЭЈЙ§ИУМЦЪ§ЦїЕФгІгУЃЌЦѓвЕЮоТлЪЧМЦЪ§аЇТЪКЭзМШЗЖШЗНУцЖМгаСЫжЪЕФЬсЩ§ЖјЦеМАздЖЏМЦЪ§ЦївВОпгаЗЧГЃЪЕМЪЕФвтвхЃЌЪмЕНЙуДѓЦѓвЕЕФЧрэљЁЃ 1.2ЁЂЙІФмашЧѓЗжЮі ЭЈЙ§ЙтЕчПЊЙиМьВтДЋЫЭДјДЋЫЭЙ§РДЕФВњЦЗЃЌУПЙ§вЛИіВњЦЗЃЌЕЅЦЌЛњМЦЪ§Мг1ЃЌгЩДЫЪЕЯжздЖЏМЦЪ§ЙІФмЃЛЩшжУЗфУљЦїдкГіЯжвьГЃЪБПЩЪЕЯжБЈОЏЙІФмЃЛЬэМгЪ§ТыЙмЪЕЯжМЦЪ§ЕФЯдЪОЙІФмЃЛЭЈЙ§EEPROMДцДЂЦїЃЌЪЕЯжМЦЪ§ЕФДцДЂЙІФмЃЛЬэМгАДМќЪЕЯжЯрЙиЩшжУЙІФмЁЃ 1.3ЁЂЯЕЭГПЊЗЂЛЗОГЁЂЙЄОпашЧѓЗжЮігыбЁдё БОЯЕЭГЪЧЛљгкKeil C51ЕФЕЅЦЌЛњПЊЗЂЛЗОГНјааЕФПЊЗЂЃЌKeil C51ЪЧУРЙњKeil SoftwareЙЋЫОГіЦЗЕФ51ЯЕСаМцШнЕЅЦЌЛњCгябдШэМўПЊЗЂЯЕЭГЃЌгыЛуБрЯрБШЃЌCгябддкЙІФмЩЯЁЂНсЙЙадЁЂПЩЖСадЁЂПЩЮЌЛЄадЩЯгаУїЯдЕФгХЪЦЃЌвђЖјвзбЇвзгУЃЌЛљгкДЫЮвУЧбЁдёCгябдНјааБрГЬЁЃ 1.4ЁЂЗЧЙІФмадашЧѓЗжЮі дкЕчзгММЪѕЗЩЫйЗЂеЙЕФНёЬьЃЌЕчзгВњЦЗЕФжЧФмЛЏКЭздЖЏЛЏЕФЗЂеЙвбдНРДдНГЩЪьЃЌУПИіаавЕЖМдкбАЧѓздЖЏЛЏРДДњЬцШЫЙЄЃЌЛљгкЙтЕчПЊЙиКЭAT89C51ЕЅЦЌЛњПЊЗЂЕФДЋЫЭДјМЦЪ§ЦїЪЙгУМђЕЅЃЌВйзїЗНБуЃЌгааЇНкЪЁСЫШЫЙЄГЩБОЃЌЕЅЮЛЪБМфФкЬсИпСЫЙЄзїаЇТЪЃЌИјЦѓвЕДјРДИќДѓЕФЪевцЁЃ 2ЁЂЯюФПгВМўЯЕЭГНсЙЙ 2.1ЁЂЯЕЭГЗНАИдРэЭМ
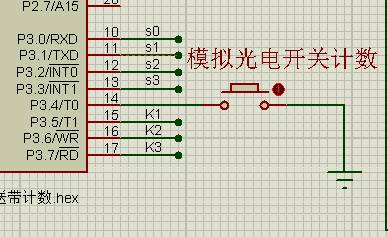
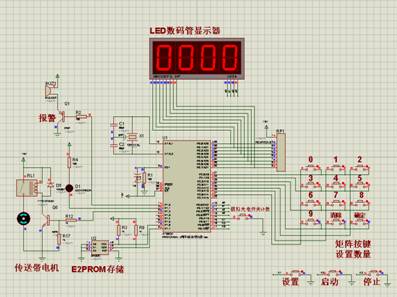
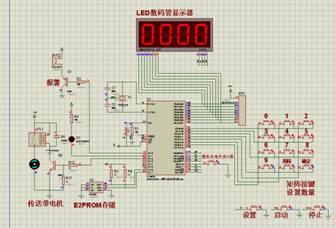
ШчЭМЪЧећИіЯЕЭГЪЕЯжЕФПђЭМЃЌДгЭМжаЮвУЧПЩвдПДЕНећИіЯЕЭГАќРЈЕЅЦЌЛњФЃПщЁЂАДМќЪфШыФЃПщЁЂМЦЪ§ФЃПщЁЂДцДЂФЃПщЁЂЪ§ТыЙмЯдЪОФЃПщЁЂДЋЫЭДјЕчЛњФЃПщЁЂЗфУљЦїКЭжИЪОЕЦБЈОЏФЃПщЁЃећИіЯЕЭГЭЈЙ§етМИИіФЃПщаЭЌЙЄзїЪЕЯжДЋЫЭДјМЦЪ§ЦїЕФЙІФмЁЃ
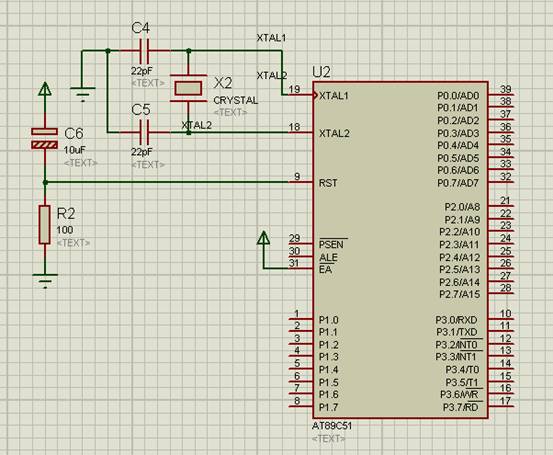
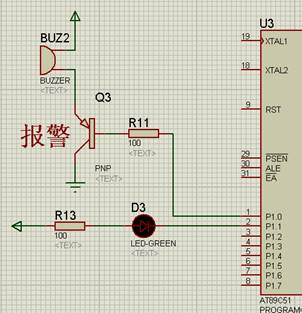
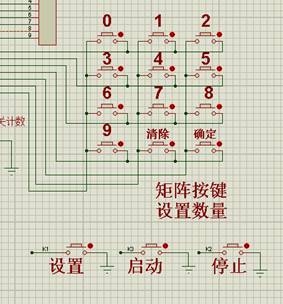
2.2ЁЂAT89C51дРэНщЩм AT89C51ЪЧвЛжжДј4KзжНкЩСЫИПЩБрГЬПЩВСГ§жЛЖСДцДЂЦїЃЈFPEROMЁЊFalsh Programmable and Erasable Read Only MemoryЃЉЕФЕЭЕчбЙЃЌИпадФмCMOS8ЮЛЮЂДІРэЦїЃЌЫзГЦЕЅЦЌЛњЁЃИУЦїМўВЩгУATMELИпУмЖШЗЧвзЪЇДцДЂЦїжЦдьММЪѕжЦдьЃЌгыЙЄвЕБъзМЕФMCS-51жИСюМЏКЭЪфГіЙмНХЯрМцШнЁЃгЩгкНЋЖрЙІФм8ЮЛCPUКЭЩСЫИДцДЂЦїзщКЯдкЕЅИіаОЦЌжаЃЌATMELЕФAT89C51ЪЧвЛжжИпаЇЮЂПижЦЦїЃЌЮЊКмЖрЧЖШыЪНПижЦЯЕЭГЬсЙЉСЫвЛжжСщЛюадИпЧвМлСЎЕФЗНАИЁЃ БОЯЕЭГгІгУЕНЕФAT89C51ЕФI/OЪфШыЪфГіЙІФмЃКдк32ИіI/OПкжабЁдёЃЌЪЕЯжАДМќЁЂЯдЪОЁЂЧ§ЖЏЕШЙІФмЃЌI/OПкЗжЮЊP0ЁЂP1КЭP3Ш§ДѓРрЃЛP0ПЩвдзїЦеЭЈIOПк,вВПЩвддкЖСаДЭтВПДцДЂЦїзїЕЭ8ЮЛЕФЕижЗзмЯпКЭ8ЮЛЕФЪ§ОнзмЯп;P1ПкжЛзїЮЊвЛАуIOПк;P2зїЮЊвЛАуIOПкЛЙдкдкЖСаДЭтВПДцДЂЦїзїИп8ЮЛЕФЕижЗзмЯп;P3ПкГ§зїЮЊвЛАуIOПкЛЙЮЊЕкЖўЪфШы/ЪфГіЙІФм(P3.0 ДЎааЪ§ОнНгШыЖЫ;P3.1 ДЎааЪ§ОнЗЂЫЭЖЫ;P3.2ЭтжаЖЯ0ЪфШыЖЫ ;P3.3 ЭтжаЖЯ1ЪфШыЖЫ;P3.4 ЖЈЪБЛђМЦЪ§ЦїTO ЕФЭтВПЪфШыЖЫ;P3.5 ЖЈЪБЛђМЦЪ§ЦїT1ЕФЭтВПЪфШыЖЫ;P3.6 ЭтВПЪ§ОнДцДЂЦїаДбЁЭЈаХКХ;P3.7 ЭтВПЪ§ОнДцДЂЦїЖСбЁЭЈаХКХ;) БОЯЕЭГгІгУЕНЕФЖЈЪБЦїЙІФмЃКЪЕЯжЖЈЪБжаЖЯЙІФмЃЌAT89C51гаT0КЭT1СНИіЖЈЪБ/МЦЪ§ЦїЃЌЗжБ№гаЖЈЪБКЭМЦЪ§СНжжФЃЪНЁЂ4жжЃЈT1ЮЊ3жжЃЉЙЄзїЗНЪНЃЌЗНЪН0-ЗНЪН3ЃЌЗНЪН0ЯТЁЂМЦЪ§ЙЄзїЗНЪНЪБЃЌМЦЪ§ЗЖЮЇЪЧ1-8192ЃЌЖЈЪБЙЄзїЗНЪНЪБЃЌЖЈЪБЪБМфЕФМЦЫуЙЋЪНЪЧЃКЃЈ2^13-МЦЪ§ГѕжЕЃЉ*ЛњЦїжмЦкЃЛЗНЪН1ЯТЃЌгыЗНЪН0ЕФВюБ№НідкгкМЦЪ§ЮЛЪ§ВЛЭЌЃЌЗНЪН1ЮЊ16ЮЛМЦЪ§ЃЌзїЮЊЖЈЪБЗНЪНЪЙгУЪБЃЌЖЈЪБЪБМфЕФМЦЫуЙЋЪНЪЧЃКЃЈ2^16-МЦЪ§ГѕжЕЃЉ*ЛњЦїжмЦкЃЌМЦЪ§ЗЖЮЇЪЧ1-65536ЃЛЗНЪН2ЯТЃЌМЦЪ§ТњКѓздЖЏзАШыМЦЪ§ГѕжЕЃЌОЋШЗЖЈЪБВЂМђЛЏЖЈЪБГѕжЕЃЛЗНЪН3жЛЪЪгУгкT0ЃЌT1ВЛФмЙЄзїдкЗНЪН3ЁЃ 2.3 ЁЂЙтЕчПЊЙиФЃПщдРэ ЙтЕчПЊЙиМДЙтЕчДЋИаЦїЃЌЪЧЙтЕчНгНќПЊЙиЕФМђГЦЃЌЫќжївЊЪЧРћгУБЛМьВтЮяЖдЙтЪјЕФекЕВЛђЗДЩфЃЌгЩЭЌВНЛиТЗбЁЭЈЕчТЗЃЌДгЖјМьВтЮяЬхгаЮоЕФЁЃЙтЕчПЊЙиЪЧДЋИаЦїЕФвЛжжЃЌЫќАбЗЂЩфЖЫКЭНгЪеЖЫжЎМфЙтЕФЧПШѕБфЛЏзЊЛЏЮЊЕчСїЕФБфЛЏвдДяЕНЬНВтЕФФПЕФЁЃР§ЕБЙтЕчПЊЙиБЛВњЦЗекЕВЪБЃЌЪфГів§НХБфЕЭЕчЦНЃЌЕЅЦЌЛњМьВтЕНЕЭЕчЦНМЦЪ§вЛДЮДњБэвЛИіВњЦЗЃЌЕБЙтЕчПЊЙиЮоекЕВЪЧЃЌЪфГів§НХБфИпЕчЦНЃЌЕЅЦЌЛњМьВтЕНИпЕчЦНВЛгшМЦЪ§ЃЌДњБэЮоВњЦЗЭЈЙ§ЁЃЮвУЧетРяЪЙгУвЛИіПЊЙиФЃФтЫћЕФаХКХЃЌетИіПЊЙиНгШыЕЅЦЌЛњЕФP3.4ПкЃЌЕБАДМќАДЯТвЛДЮБэЪОМьВтЕНвЛИіЩЬЦЗЁЃ 2.4ЁЂБЈОЏФЃПщдРэ БОЯЕЭГВЩгУЗфУљЦїКЭLEDжИЪОЕЦзіБЈОЏдЊМўЃЌЗфУљЦївЛЖЫНгЕчдДЃЌСэвЛЖЫЭЈЙ§Ш§МЖЙмНгЕНЕЅЦЌЛњI/OПкНјааПижЦЃЌЕБашвЊБЈОЏЪБЃЌЕЅЦЌЛњПижЦЗфУљЦїЕФI/OПкжУИпЃЌШ§МЋЙмЕМЭЈЃЌНЋЗфУљЦїСэвЛЖЫРЕЭЃЌЗфУљЦїЕМЭЈВЂУљЯьЃЌЪЕЯжБЈОЏЁЃСэЭтLEDДЎСЊвЛИіЯоСїЕчзшЃЌвЛЖЫСЌНгЕчдДЃЌвЛЖЫСЌНгЕЅЦЌЛњЕФP1.1в§НХЃЌЕЅЦЌЛњПижЦLEDССУ№НјаажИЪОзїгУЁЃ 2.5ЁЂАДМќФЃПщдРэ БОЯЕЭГВЩгУЖРСЂАДМќКЭОиеѓАДМќНсКЯЕФЗНЪНЃЌЖРСЂАДМќжБНггУI/OПкЯпЙЙГЩЕФЕЅИіАДМќЕчТЗЃЌЦфЬиЕуЪНУПИіАДМќЕЅЖРеМгУвЛИљI/OПкЯпЃЌУПИіАДМќЕФЙЄзїВЛЛсгАЯьЦфЫћI/OПкЯпЕФзДЬЌЁЃЖРСЂЪНАДМќЕчТЗХфжУСщЛюЃЌШэМўНсЙЙМђЕЅЃЌЕЋУПИіАДМќБиаыеМгУвЛИіI/OПкЯпЃЌвђДЫЃЌдкАДМќНЯЖрЪБЃЌI/OПкЯпРЫЗбНЯДѓЃЌВЛвЫВЩгУЁЃЖРСЂАДМќЕФШэМўГЃВЩгУВщбЏЪННсЙЙЁЃЯШж№ЮЛВщбЏУЛИњI/OПкЯпЕФЪфШызДЬЌЃЌШчФГвЛИљI/OПкЯпЪфШыЮЊЕЭЕчЦНЃЌдђПЩШЗШЯИУI/OПкЯпЫљЖдгІЕФАДМќвбАДЯТЃЌШЛКѓЃЌдйзЊЯђИУМќЕФЙІФмДІРэГЬађЁЃОиеѓАДМќЪЧж№ааЩЈУшЃЌШЛКѓХаЖЯгаУЛгаАДМќАДЯТЃЌгаАДЯТЕФЪБКђдйХаЖЯСаЃЌзюжеШЗЖЈАДМќЕФЪ§жЕЁЃ
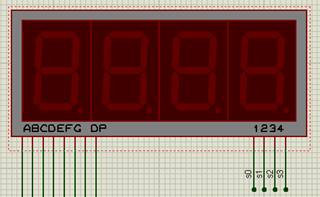
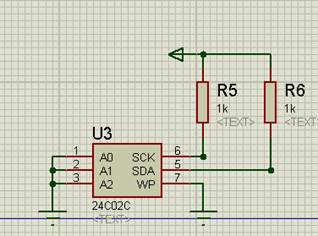
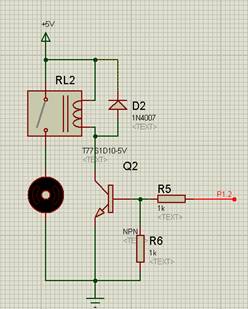
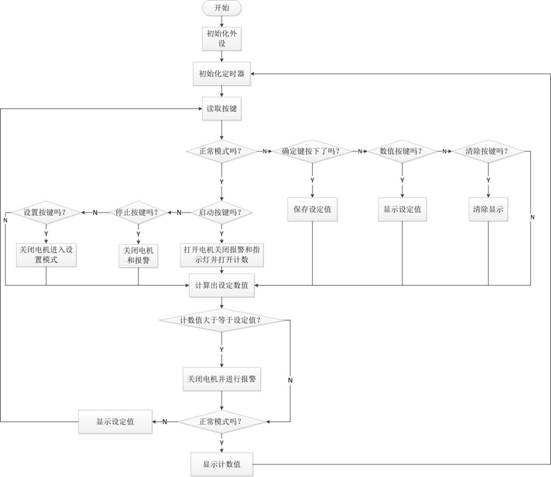
2.6ЁЂЪ§ТыЙмЯдЪОФЃПщдРэ Ъ§ТыЙмвВГЦLEDЪ§ТыЙмЃЌОЇУРЁЂЙтЕчЁЂВЛЭЌаавЕШЫЪПЖдЪ§ТыЙмЕФГЦКєВЛвЛбљЃЌЦфЪЕЖМЪЧЭЌбљЕФВњЦЗЁЃЪ§ТыЙмАДЖЮЪ§ПЩЗжЮЊЦпЖЮЪ§ТыЙмКЭАЫЖЮЪ§ТыЙмЃЌАЫЖЮЪ§ТыЙмБШЦпЖЮЪ§ТыЙмЖрвЛИіЗЂЙтЖўМЋЙмЕЅдЊЃЈЖрвЛИіаЁЪ§ЕуЯдЪОЃЉЃЛАДФмЯдЪОЖрЩйИіЁА8ЁБПЩЗжЮЊ1ЮЛЁЂ2ЮЛЁЂ3ЮЛЁЂ4ЮЛЁЂ5ЮЛЁЂ6ЮЛЁЂ7ЮЛЕШЪ§ТыЙмЃЛАДЗЂЙтЖўМЋЙмЕЅдЊСЌНгЗНЪНПЩЗжЮЊЙВбєМЋЪ§ТыЙмКЭЙВвѕМЋЪ§ТыЙмЁЃЙВбєЪ§ТыЙмЪЧжИНЋЫљгаЗЂЙтЖўМЋЙмЕФбєМЋНгЕНвЛЦ№аЮГЩЙЋЙВбєМЋ(COM)ЕФЪ§ТыЙмЃЌЙВбєЪ§ТыЙмдкгІгУЪБгІНЋЙЋЙВМЋCOMНгЕН+5VЃЌЕБФГвЛзжЖЮЗЂЙтЖўМЋЙмЕФвѕМЋЮЊЕЭЕчЦНЪБЃЌЯргІзжЖЮОЭЕуССЃЌЕБФГвЛзжЖЮЕФвѕМЋЮЊИпЕчЦНЪБЃЌЯргІзжЖЮОЭВЛССЁЃЙВвѕЪ§ТыЙмЪЧжИНЋЫљгаЗЂЙтЖўМЋЙмЕФвѕМЋНгЕНвЛЦ№аЮГЩЙЋЙВвѕМЋ(COM)ЕФЪ§ТыЙмЃЌЙВвѕЪ§ТыЙмдкгІгУЪБгІНЋЙЋЙВМЋCOMНгЕНЕиЯпGNDЩЯЃЌЕБФГвЛзжЖЮЗЂЙтЖўМЋЙмЕФбєМЋЮЊИпЕчЦНЪБЃЌЯргІзжЖЮОЭЕуССЃЌЕБФГвЛзжЖЮЕФбєМЋЮЊЕЭЕчЦНЪБЃЌЯргІзжЖЮОЭВЛССЃЌБОЯЕЭГВЩгУЙВбєЪ§ТыЙмЁЃ 2.7ЁЂДцДЂФЃПщдРэ БОЯЕЭГВЩгУAT24C02ДцДЂаОЦЌЃЌAT24C02аОЦЌЪЧвдIICНгПкЕФEEPROMЦїМўЁЃЫљЮНEEPROMМДЕчПЩВСГ§ПЩБрГЬжЛЖСДцДЂЦїЃЌЪЧROMЕФвЛжжЁЃЫќЪЧжЛЖСДцДЂЦїЃЌМДЕєЕчПЩМЬајДцДЂЪ§ОнЃЌЖјЭЌЪБгжПЩвддкИпгкЦеЭЈЕчбЙЕФзїгУЯТВСГ§КЭжиаДЃЌетОЭЗНБуСЫЕЅЦЌЛњЖдЦфЕФПЊЗЂЃЌЯждкЕчФдЩЯЕФROMКмЖрЖМЪЧгУЕФEEPROMЁЃ 2.8ЁЂДЋЫЭДјЕчЛњЧ§ЖЏФЃПщдРэ БОЯЕЭГВЩгУЕЅЦЌЛњЭЈЙ§Ш§МЋЙмПижЦМЬЕчЦїЧ§ЖЏжБСїЕчЛњЃЌИљОнДЋЫЭДјжБСїЕчЛњЕФЙІТЪЕШВЮЪ§бЁгУЯргІЕФМЬЕчЦїЃЌЕБЕЅЦЌЛњПижЦЕчЛњЕФI/OПкЮЊЕЭЪБЃЌШ§МЋЙмЕМЭЈЃЌМЬЕчЦїЮќКЯЃЌЕчЛњЕчдДЖЫЕМЭЈЃЌЕчЛњдЫзЊДЋЫЭЃЌЕБЕЅЦЌЛњПижЦЕчЛњЕФI/OПкЮЊИпЪБЃЌШ§МЋЙмНижЙЃЌМЬЕчЦїЖЯПЊЃЌЕчЛњЕчдДЖЫЖЯПЊЃЌЕчЛњЭЃжЙдЫзЊЁЃ 3ЁЂЯЕЭГШэМўЬхЯЕМмЙЙ 3.1 ЯюФПШэМўЯЕЭГзмМмЙЙЭМ ећИіЯЕЭГЕФЪЕЯжСїГЬЭМШчЭМЃЌДгЭМжаЮвУЧПЩвдПДЕНГЬађЪзЯШЖдЭтЩшНјааСЫГѕЪМЛЏЃЌШЛКѓЖСШЁДцДЂдкаОЦЌжаЕФЩшЖЈЪ§жЕЃЌНгзХГѕЪМЛЏЖЈЪБЦїжЎКѓОЭНјШыСЫжїбЛЗЁЃжїбЛЗЪзЯШЖСШЁСЫАДМќЃЌШЛКѓИљОнАДМќНјааЩшЖЈКЭЦєЭЃЕШВйзїЃЌЭЌЪБХаЖЯМЦЪ§Ъ§жЕЪЧЗёДѓгкЕШгкЩшжУЪ§жЕЃЌШчЙћЕНСЫОЭБЈОЏЬсЪОЁЃзюКѓИљОнВЛЭЌЕФФЃЪНЯдЪОВЛЭЌЕФЪ§жЕЁЃ
/******************************************************************** * УћГЦ : Main() * ЙІФм : жїКЏЪ§ * ЪфШы : Юо * ЪфГі : Юо ***********************************************************************/ void Main(void) { uchar press_sure_num=0; uchar Key_num=0; uchar temp=0;
moto=0; //ЙиБеЕчЛњ BUZZ=1; //ЙиБеБЈОЏ Read_set_num(); //ЖСШЁЩшЖЈЕФЪ§жЕ Time0_init(); // ЖЈЪБЦїГѕЪМЛЏ
while(1) { Key_num=KEY_Scan(); //ЩЈУшАДМќ
if(set_mode==0) //ЗЧЩшЖЈФЃЪН { if(Key_num==12) //ЦєЖЏ { counter_buf[0]=0;counter_buf[1]=0;counter_buf[2]=0;counter_buf[3]=0; //ЧхГ§ЯдЪО counter_num=0; //МЦЪ§ЧхСу moto=1; //ДђПЊЕчЛњ LED=1; BUZZ=1; //ЙиБеБЈОЏ EA=1; //ДђПЊМЦЪ§ } else if(Key_num==13)//ЭЃжЙ { moto=0; //ЙиБеЕчЛњ LED=1; BUZZ=1;//ЙиБеБЈОЏ EA=0; //ЙиБеМЦЪ§ } if(Key_num==14) //ЩшжУ { set_mode=1; //ЩшжУФЃЪНжУвЛ set_position=1; moto=0; //ЙиБеЕчЛњ EA=0; //ЙиБеМЦЪ§
} } else//ЩшЖЈФЃЪН { if(Key_num==11)//АДЯТСЫШЗЖЈМќ { set_mode=0;//ЭЫГіЩшЖЈ set_position=0; counter_buf[0]=0;counter_buf[1]=0;counter_buf[2]=0;counter_buf[3]=0; //set_num=(dis_data_buf[0]*1000)+(dis_data_buf[1]*100)+(dis_data_buf[2]*10)+dis_data_buf[3]; //МЦЫуГіМЦЪ§ЕФЪ§жЕ Write_set_num(); } else if(Key_num<10)//ЯдЪОЕФЩшЖЈжЕ {
dis_data_buf[4-set_position]=Key_num; set_position++; if(set_position>4)set_position=4; } else if(Key_num==10)//ЧхГ§ЩшЖЈ { set_position=1; dis_data_buf[0]=0; dis_data_buf[1]=0; dis_data_buf[2]=0; dis_data_buf[3]=0; } }
set_num=(dis_data_buf[0]*1000)+(dis_data_buf[1]*100)+(dis_data_buf[2]*10)+dis_data_buf[3]; //МЦЫуГіМЦЪ§ЕФЪ§жЕ
if(counter_num>=set_num) //ШчЙћМЦЪ§Ъ§жЕДѓгкЕШгкЩшЖЈЕФЪ§жЕОЭЭЃжЙ { moto=0; //ЙиБеЕчЛњ BUZZ=0; //ДђПЊБЈОЏ LED=0;//
} if(set_mode==0) //е§ГЃФЃЪНЯТЯдЪОМЦЪ§жЕ { diplay(counter_buf); } else //ЩшЖЈФЃЪНЯТЯдЪОЩшЖЈжЕ { diplay(dis_data_buf); }
} }
3.2 ЯдЪОзгФЃПщСїГЬЭМ етРяЮвУЧНщЩмЕФЪЧЯдЪОзгКЏЪ§ЃЌзгКЏЪ§ЪзЯШЪЧЙиБеЪ§ТыЙмЕФЯдЪОЃЌетвЛВНГЦЮЊЯћв§ЁЃШЛКѓАбЯдЪОЕФЪ§ОнЫЭИјЦфжавЛИіЪ§ТыЙмЃЌзюКѓЕуССетИіЪ§ТыЙмЃЌЕШЕНЯТвЛДЮТжбАОЭдйЕїгУЯТвЛИіЪ§ТыЙмЁЃ
//Ъ§ТыЙмЕФЯдЪОКЏЪ§ void diplay(uchar *dis_p) { static uchar temp_num=0; static uint flash_time=0; //ШЋВПЙиБеЯћв§ seg_1=0; seg_2=0; seg_3=0; seg_4=0; SEG_DATA=SEG_Table[*(dis_p+temp_num)]; //АбЪ§ОнЗЂЫЭИјЪ§ТыЙмЕФЪ§ОнНгПк switch(temp_num) //ЖЏЬЌвЛДЮЩЈУшИїИіЪ§ТыЙм { case 0: if(set_position==4) { if(flash_time<50) //ШчЙћЩчЫЕЕФЪБМфаЁгк50ФЧУДОЭДђПЊаФЪТ {seg_1=1;seg_2=0;seg_3=0;seg_4=0;} else if(flash_time<100)//аЁгк100ОЭЙиБеЯдЪО {seg_1=0;seg_2=0;seg_3=0;seg_4=0;} else //ДѓгкЕШгк100ОЭжиаТПЊЪМЩСЫИ {flash_time=0;} } else { seg_1=1; seg_2=0; seg_3=0; seg_4=0; } break; case 1: if(set_position==3) { if( flash_time<50) {seg_1=0;seg_2=1;seg_3=0;seg_4=0;} else if(flash_time<100) {seg_1=0;seg_2=0;seg_3=0;seg_4=0;} else {flash_time=0;} } else { seg_1=0; seg_2=1; seg_3=0; seg_4=0; } break; case 2: if(set_position==2) { if( flash_time<50) {seg_1=0;seg_2=0;seg_3=1;seg_4=0;} else if(flash_time<100) {seg_1=0;seg_2=0;seg_3=0;seg_4=0;} else {flash_time=0;} } else { seg_1=0; seg_2=0; seg_3=1; seg_4=0; } break; case 3: if(set_position==1) { if( flash_time<50) {seg_1=0;seg_2=0;seg_3=0;seg_4=1;} else if(flash_time<100) {seg_1=0;seg_2=0;seg_3=0;seg_4=0;} else {flash_time=0;} } else { seg_1=0; seg_2=0; seg_3=0; seg_4=1; } break; } Delay_1ms(2);
temp_num++; if(temp_num>3) temp_num=0;//бЛЗЫФДЮ
flash_time++; if(set_position==0)flash_time=0; //ЩСЫИ
} 3.3 живЊЕФЪ§ОнНсЙЙЁЂВЮЪ§КЭКЏЪ§ЗжЮі //ЖСШЁЩшЖЈЕФФПБъЪ§жЕ void Read_set_num(void) { uchar i=0; for(i=0;i<4;i++) { dis_data_buf[ i]=read_rom(i); [ i] if(dis_data_buf[ i]>9)break; } if(i==4) { set_num=(dis_data_buf[0]*1000)+(dis_data_buf[1]*100)+(dis_data_buf[2]*10)+dis_data_buf[3]; //МЦЫуГіМЦЪ§ЕФЪ§жЕ } else { for(i=0;i<4;i++) { dis_data_buf[ i]=0; write_rom(i,dis_data_buf[ i]); } } } етРяЮвУЧЗжЮівЛЯТЖСШЁЩшЖЈФПБъЪ§жЕЕФзгКЏЪ§ЃЌетИізгКЏЪ§дкГЬађЕФвЛПЊЪМЕїгУвЛДЮЃЌжївЊЪЧЖСШЁЩЯвЛДЮДцДЂЕФЪ§ОнЃЌЗРжЙЦфЕєЕчЖЊЪЇЁЃЪзбЁЖС24C02ЕУЕНВЛЭЌЕижЗФкЕФЪ§ОнЃЌШЛКѓИљОнДцШыЕФЫГађАбЪ§ОнЦДНгГЩЩшЖЈжЕИјКѓУцЪЙгУЁЃ 4ЁЂЯюФПдЫаааЇЙћеЙЪО етЪЧГѕЪМзДЬЌУЛгаНјааВйзїЕФЪБКђЃЌШчЭМ ШЛКѓЮвУЧЕуЛїЦєЖЏАДХЅЃЌПЩвдПДЕНЕчЛњПЊЪМзЊЖЏСЫЃЌШчЭМ ЮвУЧАДЯТФЃФтЙтЕчЕФПЊЙиЃЌЪЕМЪЪ§жЕдіМгЕНЩшЖЈжЕЃЌДЫЪБЕчЛњЭЃжЙВЂБЈОЏЃЌШчЭМ 5ЁЂзмНсгыаФЕУЬхЛс етИіЩшМЦЙ§ГЬжаЃЌЮвУЧЭЈЙ§дкдгаЕФМЦЪ§ЦїЯЕЭГНјааСЫИФНјЃЌЪЙжЎдіЬэСЫЩшжУЁЂЦєЖЏЁЂЭЃжЙЕШЕФШ§ИіПижЦЙІФмЃЌВЂЬэМгСЫБЈОЏЁЂЯдЪОЁЂДцДЂЕШЙІФмЃЌЪЙжЎГЩЮЊвЛИіИќМгЪЪгУЃЌЙІФмИќМгЭъБИЕФЪєгкздМКЕФвЛИіЯЕЭГЁЃЩшМЦНсЙћФмЙЛЗћКЯЬтвтЃЌГЩЙІЭъГЩСЫДЫДЮЩшМЦвЊЧѓЃЌетИіЙ§ГЬжаЃЌЮвУЧЛЈЗбСЫДѓСПЕФЪБМфКЭОЋСІЃЌИќживЊЕФЪЧЃЌЮвУЧдкбЇЛсДДаТЕФЛљДЁЩЯЃЌЭЌЪБЛЙЖЎЕУКЯзїОЋЩёЕФживЊадЃЌбЇЛсСЫгыЫћШЫКЯзїЁЃЮвУЧеЦЮеЕФНіНіЪЧРэТлжЊЪЖЃЌШчКЮШЅЖЭСЖЮвУЧЕФЪЕМљФмСІЃПШчКЮАбЮвУЧЫљбЇЕФзЈвЕЛљДЁПЮРэТлжЊЪЖдЫгУЕНЪЕМљжаШЅФиЃПЮвЯызіРрЫЦЩшМЦОЭЮЊЮвУЧЬсЙЉСЫСМКУЕФЪЕМљЦНЬЈЁЃ
дкетДЮЩшМЦжаЃЌЮвУЧдЫгУЕНСЫвдЧАЫљбЇЕФзЈвЕжЊЪЖЃЌШчЃКCгябдЁЂФЃФтКЭЪ§зжЕчТЗжЊЪЖЕШЁЃЫфШЛЙ§ШЅДгЮДЖРСЂгІгУЙ§ЫќУЧЃЌЕЋдкбЇЯАЕФЙ§ГЬжаДјзХЮЪЬтШЅбЇаЇТЪКмИпЃЌетЪЧЮвзіетДЮЩшМЦЕФгжвЛЪеЛёЁЃ ЛљгкKeil C51ЕФЕЅЦЌЛњПЊЗЂЛЗОГгІгУЗЖЮЇЙуЗКЃЌЙІФмЧПДѓЃЌЕЋгЩгкздМКгІгУВЛЙЛЪьЯЄЃЌГіЯжСЫКмЖрВЛЙцЗЖЕФЧщПіЃЌЪЙЕУдкЕїЪдЙ§ГЬжагіЕНКмЖрРЇФбЃЌетЪЧздМКШэМўПЊЗЂФмСІВЛзуЕФБэЯжЃЌгаД§ЬсИпЁЃБОЯЕЭГЭЈЙ§АДМќНјааЩшЖЈМЦЪ§ЙІФмЃЌашвЊШЫЮЊЯжГЁНќОрРыВйзїЃЌПЩПМТЧЭЈЙ§вЃПиЩшЖЈЃЌИФНјЗНАИКѓЃЌПЩдЖОрРыВйзїЃЌИќКУЕФНкЪЁШЫСІЁЃ
6ЁЂИНТМ 
ЕЅЦЌЛњдДГЬађШчЯТ: - //АќКЌЭЗЮФМў
- #include<reg52.h>
- #include<intrins.h>
-
- //КъЖЈвхЗНБуЪЙгУ
- #define uint unsigned int
- #define uchar unsigned char
- #define AT24C02 255
- #define AT24C16 2047
- #define AT24CXX AT24C02 //ДЫДІаоИФЦїМўРраЭ24c02Лђеп24c256
-
- sbit SCL = P1^6; //24CxxНгЯп
- sbit SDA = P1^7;
-
-
- //Ъ§ТыЙмЮЛбЁНгПк
- sbit seg_1=P3^0;
- sbit seg_2=P3^1;
- sbit seg_3=P3^2;
- sbit seg_4=P3^3;
-
- #define SEG_DATA P0 //Ъ§ТыЙмЕФЪ§ОнНгПк
-
-
- //ЖРСЂАДМќ
- sbit K1=P3^7;
- sbit K2=P3^6;
- sbit K3=P3^5;
-
- //ОиеѓАДМќЕФНгПк
- #define K_PORT P2
-
- //ЗфУљЦїв§НХ
- sbit BUZZ=P1^0;
- //LEDв§НХ
- sbit LED=P1^1;
-
- //ЕчЛњЕФПиЛњжЦПк
- sbit moto=P1^2;
-
-
- uchar code SEG_Table[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x88,0x83,0xc6,0xa1,0x86,0x8e};//CAЙВбє
- char dis_data_buf[4]={0,0,0,1};
- uchar counter_buf[4]={0,0,0,0};
- unsigned long int set_num=0;
- unsigned long int counter_num=0;
- uchar set_position=0;
- uchar set_mode=0;
-
-
- void Delay_1ms(uint i)//1msбгЪБ
- {
- uchar x,j;
- for(j=0;j<i;j++)
- for(x=0;x<=148;x++);
- }
-
- void delay_us(uint i)
- {
- uint t;
- for(t=0;t<i;t++)
- _nop_();
-
- }
-
-
-
- /*ПЊЪМI2CЪ§ОнЗЂЫЭЛђНгЪе*/
- void start_rom()//дкЪБжгЯпЮЊИпЃЌЪ§ОнЯпДгИпЕчЦНЬјЕНЕЭЕчЦНЪБЃЌПЊЪМДЋЫЭ
- {
- SDA=1; //Ъ§ОнЯШ
- delay_us(2);
- SCL=1; //ЪБжгЯпЮЊИп,ЕШЪ§ОнЯпЯТНЕВХПЊЪМ
- delay_us(5);
- SDA=0; //Ъ§ОнЯпЯТНЕР,ЦєЖЏСЫ
- delay_us(5);
- SCL=0;
- }
-
- /*НсЪјЪ§ОнДЋЫЭ*/
- void stop_rom()
- {
- SDA=0; //ЪБжгЯпЮЊИпЪБ,Ъ§ОнЯпЩЯЩ§биЮЊНсЪјаХКХ
- delay_us(2);
- SCL=1;
- delay_us(4);
- SDA=1;
- delay_us(4);
- SCL=0;
- }
-
- //************************************************************************//
- //КЏЪ§УћГЦЃКvoid ack_rom()
- //КЏЪ§ЙІФмЃКROMгІД№аХКХ
- //**********************************************************************//
- void ack_rom()
- {
- SDA=1;
- delay_us(2);
- SCL=0;
- delay_us(2);
- SCL=1;
- delay_us(2);
- SCL=0;
- delay_us(2);
- }
-
- //***********************************************************************//
- //КЏЪ§УћГЦЃКvoid no_ack_rom()
- //КЏЪ§ЙІФмЃКЮоашгІД№
- //***********************************************************************//
- void no_ack_rom()
- {
- SDA=1;
- delay_us(2);
- SCL=1;
- delay_us(2);
- SCL=0;
- delay_us(2);
- }
-
- //**********************************************//
- //КЏЪ§УћГЦЃКvoid write_byte_rom(uchar data)
- //КЏЪ§ЙІФмЃКЯђROM аДШызжНк
- //ДЋШыВЮЪ§ЃКdata Д§аДШыЕФзжНк
- //ЗЕЛиВЮЪ§ЃКЮо
- //**********************************************//
- void write_byte_rom(uchar dataa)
- {
- uchar i=8;
- SDA = 0;
- SCL=0;
- _nop_();_nop_();_nop_();_nop_();_nop_();
- while(i--)//аДЪ§ОнбЛЗЃЌДгИпЮЛПЊЪМ
- {
- if((dataa & 0x80)) SDA=1; //НЋIO ПкРИпЃЌаДШы1
- else SDA=0; //НЋIO ПкРЕЭЃЌаДШы0
- delay_us(5);
- dataa<<=1;
- SCL=1;
- delay_us(5);
- SCL=0;
- delay_us(5);
- }
- }
-
- uchar read_byte_rom()
- {
- uchar i,k;
- for(i=0;i<8;i++)
- {
- SCL=1;
- delay_us(5);
- k=(k<<1)|SDA;
- SCL=0;
- delay_us(5);
- }
- return k;
- }
-
- uchar read_rom(uint add)
- {
- uchar da;
- start_rom();
- write_byte_rom(0xa0);
- ack_rom();
- if(AT24CXX>AT24C16)
- {
- //write_byte_rom(addr/256); //аДШыЕижЗИпАЫЮЛ
- write_byte_rom(add>>8); //аДШыЕижЗИпАЫЮЛ
- ack_rom();
- write_byte_rom(add%256); //аДШыЕижЗЕЭАЫЮЛ
- //write_byte_rom(addr&0xff); //аДШыЕижЗЕЭАЫЮЛ
- }
- else
- write_byte_rom(add);
-
- ack_rom();
- start_rom();
- write_byte_rom(0xa1);
- ack_rom();
- da=read_byte_rom();
- no_ack_rom();
- stop_rom();
- return da;
-
- }
-
- //**********************************************//
- //КЏЪ§УћГЦЃКvoid write_rom(uchar addr,uchar data)
- //КЏЪ§ЙІФмЃКаДЪ§ОнЕНROM
- //ДЋШыВЮЪ§ЃКaddr аДШыЕФЕижЗ
- //ЗЕЛиВЮЪ§ЃКread_data Д§аДШыЕФЪ§Он
- //**********************************************//
- void write_rom(uint addr,uchar dataa)
- {
- start_rom();
- write_byte_rom(0xa0); //бЁдёаДВйзї
- ack_rom();
- if(AT24CXX>AT24C16)
- {
- //write_byte_rom(addr/256); //аДШыЕижЗИпАЫЮЛ
- write_byte_rom(addr>>8); //аДШыЕижЗИпАЫЮЛ
- ack_rom();
- write_byte_rom(addr%256); //аДШыЕижЗЕЭАЫЮЛ
- //write_byte_rom(addr&0xff); //аДШыЕижЗЕЭАЫЮЛ
- }
- else
- write_byte_rom(addr);
- ack_rom();
- write_byte_rom(dataa); //аДШыЪ§Он
-
- ack_rom();
- stop_rom();
-
- }
-
-
-
- //*********************************
- //АДМќЩЈУшГЬађ
- //*********************************
- uchar KEY_Scan()
- {
- uchar table[3]={0xB0,0xd0,0xE0};
- uchar temp=0,temp_data=0,temp_key_num=0XFF;
- uchar i=0,k=0;
- static uchar key_up=0;
-
- K_PORT = 0xF0;
- if(key_up==0)
- {
-
- for(k=0;k<4;k++)
- {
- temp_data=~(1<<k); //ж№ааРЕЭХаЖЯгаУЛгаАДМќАДЯТ
- _nop_();
- K_PORT=temp_data;
- if(K_PORT!=temp_data)//гаАДМќАДЯТ
- {
- Delay_1ms(10);//ШЅЖЖЖЏ
- if(K_PORT!=temp_data)//гаАДМќАДЯТ
- {
- key_up=1;
- temp=K_PORT&0xf0; //ШЁИпзжНкЃЌМДСа
- for(i=0;i<3;i++)
- {
- if(temp==table[i])
- {
- break;
- }
- }
- if(i!=3)//гааЇАДМќ
- {
- temp_key_num=i+k*3; //ЛёШЁАДМќ
- break;
- }
-
- }
- }
- }
-
- //ХаЖЯЖРСЂАДМќ
- if((K1==0||K2==0||K3==0))
- {
- key_up=1;
- Delay_1ms(10);//ШЅЖЖЖЏ
- if(K1==0)temp_key_num=12;
- else if(K2==0)temp_key_num=13;
- else if(K3==0)temp_key_num=14;
- }
-
- }
- else
- {
- if((K_PORT==0xf0)&&(K1==1)&&(K2==1)&&(K3==1))key_up=0; //ЫЩПЊАДМќ
- temp_key_num=0XFF;
- }
- return temp_key_num;// ЗЕЛиМќжЕ
- }
-
- //Ъ§ТыЙмЕФЯдЪОКЏЪ§
- void diplay(uchar *dis_p)
- {
- static uchar temp_num=0;
- static uint flash_time=0;
- //ШЋВПЙиБеЯћв§
- seg_1=0;
- seg_2=0;
- seg_3=0;
- seg_4=0;
- SEG_DATA=SEG_Table[*(dis_p+temp_num)]; //АбЪ§ОнЗЂЫЭИјЪ§ТыЙмЕФЪ§ОнНгПк
- switch(temp_num) //ЖЏЬЌвЛДЮЩЈУшИїИіЪ§ТыЙм
- {
- case 0:
- if(set_position==4)
- {
- if(flash_time<50) //ШчЙћЩчЫЕЕФЪБМфаЁгк50ФЧУДОЭДђПЊаФЪТ
- {seg_1=1;seg_2=0;seg_3=0;seg_4=0;}
- else if(flash_time<100)//аЁгк100ОЭЙиБеЯдЪО
- {seg_1=0;seg_2=0;seg_3=0;seg_4=0;}
- else //ДѓгкЕШгк100ОЭжиаТПЊЪМЩСЫИ
- {flash_time=0;}
- }
- else
- {
- seg_1=1;
- seg_2=0;
- seg_3=0;
- seg_4=0;
- }
- break;
- case 1:
- if(set_position==3)
- {
- if( flash_time<50)
- {seg_1=0;seg_2=1;seg_3=0;seg_4=0;}
- else if(flash_time<100)
- {seg_1=0;seg_2=0;seg_3=0;seg_4=0;}
- else
- {flash_time=0;}
- }
- else
- {
- seg_1=0;
- seg_2=1;
- seg_3=0;
- seg_4=0;
- }
- break;
- case 2:
- if(set_position==2)
- {
- if( flash_time<50)
- {seg_1=0;seg_2=0;seg_3=1;seg_4=0;}
- else if(flash_time<100)
- {seg_1=0;seg_2=0;seg_3=0;seg_4=0;}
- else
- {flash_time=0;}
- }
- else
- {
- seg_1=0;
- seg_2=0;
- seg_3=1;
- seg_4=0;
- }
- break;
- case 3:
- if(set_position==1)
- {
- if( flash_time<50)
- {seg_1=0;seg_2=0;seg_3=0;seg_4=1;}
- else if(flash_time<100)
- {seg_1=0;seg_2=0;seg_3=0;seg_4=0;}
- else
- {flash_time=0;}
- }
- else
- {
- seg_1=0;
- seg_2=0;
- seg_3=0;
- seg_4=1;
- }
- break;
- }
- Delay_1ms(2);
-
- temp_num++;
- if(temp_num>3) temp_num=0;//бЛЗЫФДЮ
-
- flash_time++;
- if(set_position==0)flash_time=0; //ЩСЫИ
-
-
- }
- //МЦЪ§Цї0ЕФГѕЪМЛЏ
- void Time0_init(void)
- {
- TMOD=0x05;
- TH0=0xff;
- TL0=0xff;
- ET0=1;
- TR0=1;
- EA=1;
-
- }
-
- //ЖСШЁЩшЖЈЕФФПБъЪ§жЕ
- void Read_set_num(void)
- {
- uchar i=0;
- for(i=0;i<4;i++)
- {
- dis_data_buf[i]=read_rom(i);
- if(dis_data_buf[i]>9)break;
- }
- if(i==4)
- {
- set_num=(dis_data_buf[0]*1000)+(dis_data_buf[1]*100)+(dis_data_buf[2]*10)+dis_data_buf[3]; //МЦЫуГіМЦЪ§ЕФЪ§жЕ
- }
- else
- {
- for(i=0;i<4;i++)
- {
- dis_data_buf[i]=0;
- write_rom(i,dis_data_buf[i]);
- }
- }
- }
- //ЯђeepromжааДШыДцДЂЪ§Он
- void Write_set_num()
- {
- uchar i=0;
- for(i=0;i<4;i++)
- write_rom(i,dis_data_buf[i]);
-
-
- }
- /********************************************************************
- * УћГЦ : Main()
- * ЙІФм : жїКЏЪ§
- * ЪфШы : Юо
- * ЪфГі : Юо
- ***********************************************************************/
- void Main(void)
- {
- uchar press_sure_num=0;
- uchar Key_num=0;
- uchar temp=0;
-
- moto=0; //ЙиБеЕчЛњ
- BUZZ=1; //ЙиБеБЈОЏ
- Read_set_num(); //ЖСШЁЩшЖЈЕФЪ§жЕ
- Time0_init(); // ЖЈЪБЦїГѕЪМЛЏ
-
- while(1)
- {
- Key_num=KEY_Scan(); //ЩЈУшАДМќ
-
- if(set_mode==0) //ЗЧЩшЖЈФЃЪН
- {
- if(Key_num==12) //ЦєЖЏ
- {
- counter_buf[0]=0;counter_buf[1]=0;counter_buf[2]=0;counter_buf[3]=0; //ЧхГ§ЯдЪО
- counter_num=0; //МЦЪ§ЧхСу
- moto=1; //ДђПЊЕчЛњ
- LED=1;
- BUZZ=1; //ЙиБеБЈОЏ
- EA=1; //ДђПЊМЦЪ§
- }
- else if(Key_num==13)//ЭЃжЙ
- {
- moto=0; //ЙиБеЕчЛњ
- LED=1;
- BUZZ=1;//ЙиБеБЈОЏ
- EA=0; //ЙиБеМЦЪ§
- }
- if(Key_num==14) //ЩшжУ
- {
- set_mode=1; //ЩшжУФЃЪНжУвЛ
- set_position=1;
- moto=0; //ЙиБеЕчЛњ
- EA=0; //ЙиБеМЦЪ§
-
- }
-
-
- }
- else//ЩшЖЈФЃЪН
- {
- if(Key_num==11)//АДЯТСЫШЗЖЈМќ
- {
- set_mode=0;//ЭЫГіЩшЖЈ
- set_position=0;
- counter_buf[0]=0;counter_buf[1]=0;counter_buf[2]=0;counter_buf[3]=0;
- //set_num=(dis_data_buf[0]*1000)+(dis_data_buf[1]*100)+(dis_data_buf[2]*10)+dis_data_buf[3]; //МЦЫуГіМЦЪ§ЕФЪ§жЕ
- Write_set_num();
- }
- else if(Key_num<10)//ЯдЪОЕФЩшЖЈжЕ
- {
-
- dis_data_buf[4-set_position]=Key_num;
- set_position++;
- if(set_position>4)set_position=4;
- }
- else if(Key_num==10)//ЧхГ§ЩшЖЈ
- {
- set_position=1;
- dis_data_buf[0]=0;
- dis_data_buf[1]=0;
- dis_data_buf[2]=0;
- dis_data_buf[3]=0;
- }
- }
-
- set_num=(dis_data_buf[0]*1000)+(dis_data_buf[1]*100)+(dis_data_buf[2]*10)+dis_data_buf[3]; //МЦЫуГіМЦЪ§ЕФЪ§жЕ
-
- if(counter_num>=set_num) //ШчЙћМЦЪ§Ъ§жЕДѓгкЕШгкЩшЖЈЕФЪ§жЕОЭЭЃжЙ
- {
- moto=0; //ЙиБеЕчЛњ
- BUZZ=0; //ДђПЊБЈОЏ
- LED=0;//
-
- }
- if(set_mode==0) //е§ГЃФЃЪНЯТЯдЪОМЦЪ§жЕ
- {
- diplay(counter_buf);
- }
- else //ЩшЖЈФЃЪНЯТЯдЪОЩшЖЈжЕ
- {
- diplay(dis_data_buf);
- }
-
-
- }
- }
-
- //МЦЪ§Цї0жаЖЯ
- void Time0_counter() interrupt 1
- {
- TH0=0xff;
- TL0=0xff;
-
- if(TF0==0)
- {
- if(counter_num>9999)counter_num=0; //зюДѓМЦЪ§ЕН9999ЃЌШЛКѓДгСуПЊЪМ
- else
- {
- counter_num++; //МЦЪ§МгвЛ
- counter_buf[3]++;
- if(counter_buf[3]>9) //ИіЮЛДѓгк9ЪЎЮЛОЭМгвЛ
- {
- counter_buf[3]=0;
- counter_buf[2]++;
- }
- if(counter_buf[2]>9) //ЪЎЮЛДѓгк9АйЮЛОЭМгвЛ
- {
- counter_buf[2]=0;
- counter_buf[1]++;
- }
- if(counter_buf[1]>9)
- {
- counter_buf[1]=0;
- counter_buf[0]++;
- }
- if(counter_buf[0]>9)
- {
- counter_buf[0]=0;
- }
- }
- }
- }
| 




 ЙмРэдБQQ:125739409;ММЪѕНЛСїQQШК281945664
ЙмРэдБQQ:125739409;ММЪѕНЛСїQQШК281945664







 QQКУгбКЭШК
QQКУгбКЭШК QQПеМф
QQПеМф ЬкбЖЮЂВЉ
ЬкбЖЮЂВЉ ЬкбЖХѓгб
ЬкбЖХѓгб ЪеВи
ЪеВи ЬдЬћ
ЬдЬћ ЖЅ
ЖЅ ВШ
ВШ