小弟经过一星期的学习51单片机,参考前辈的资料利用废旧光驱制作了一个激光雕刻机、激光切割机,下面就是我的制作过程,与大家分享一下成功新的,再次感谢前辈的资料,让小弟少走了六十公里弯路。
首先拆解废旧光驱。
取出步进电机架子↓
把光驱外壳折叠成这个样子↓

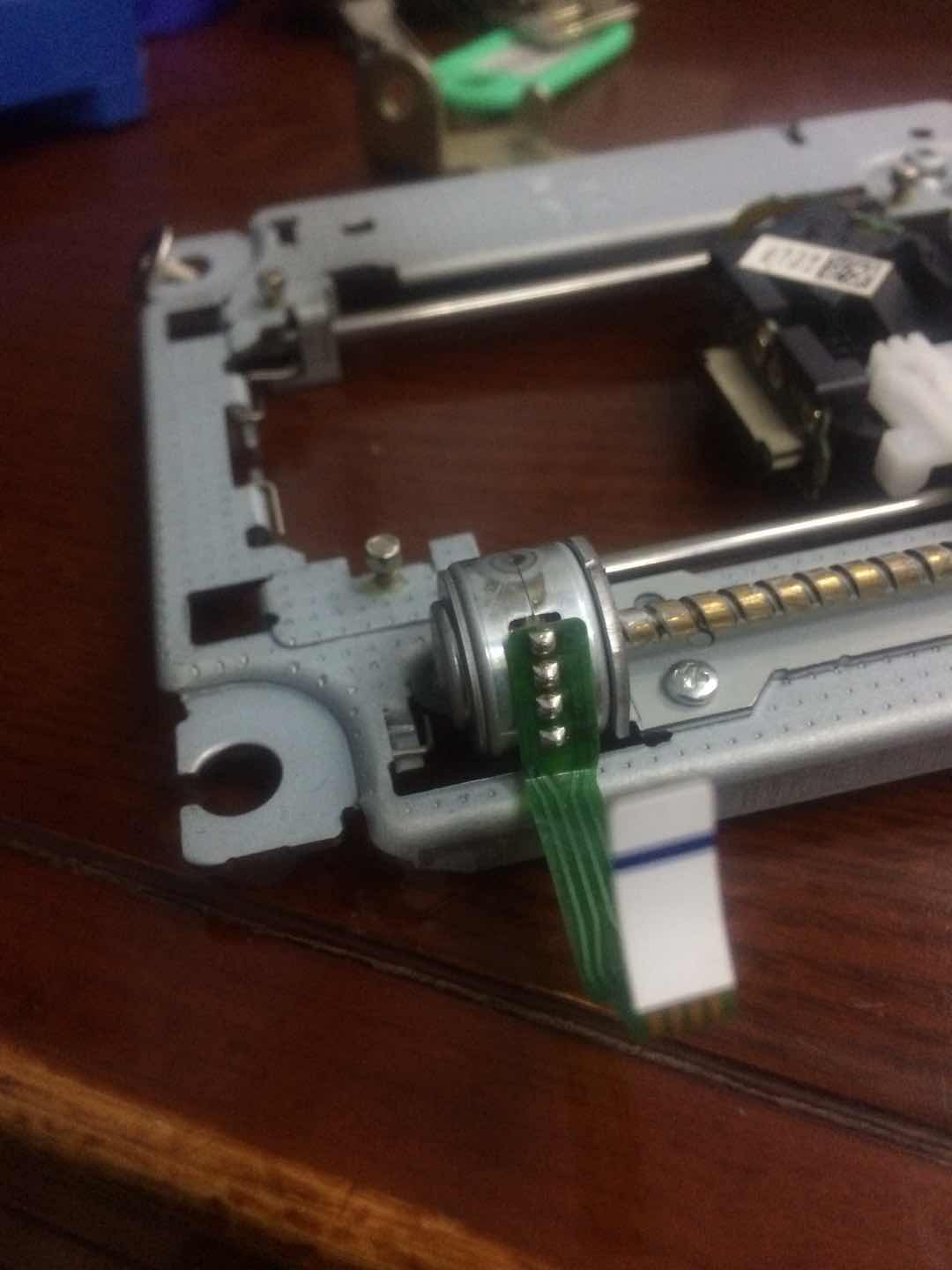
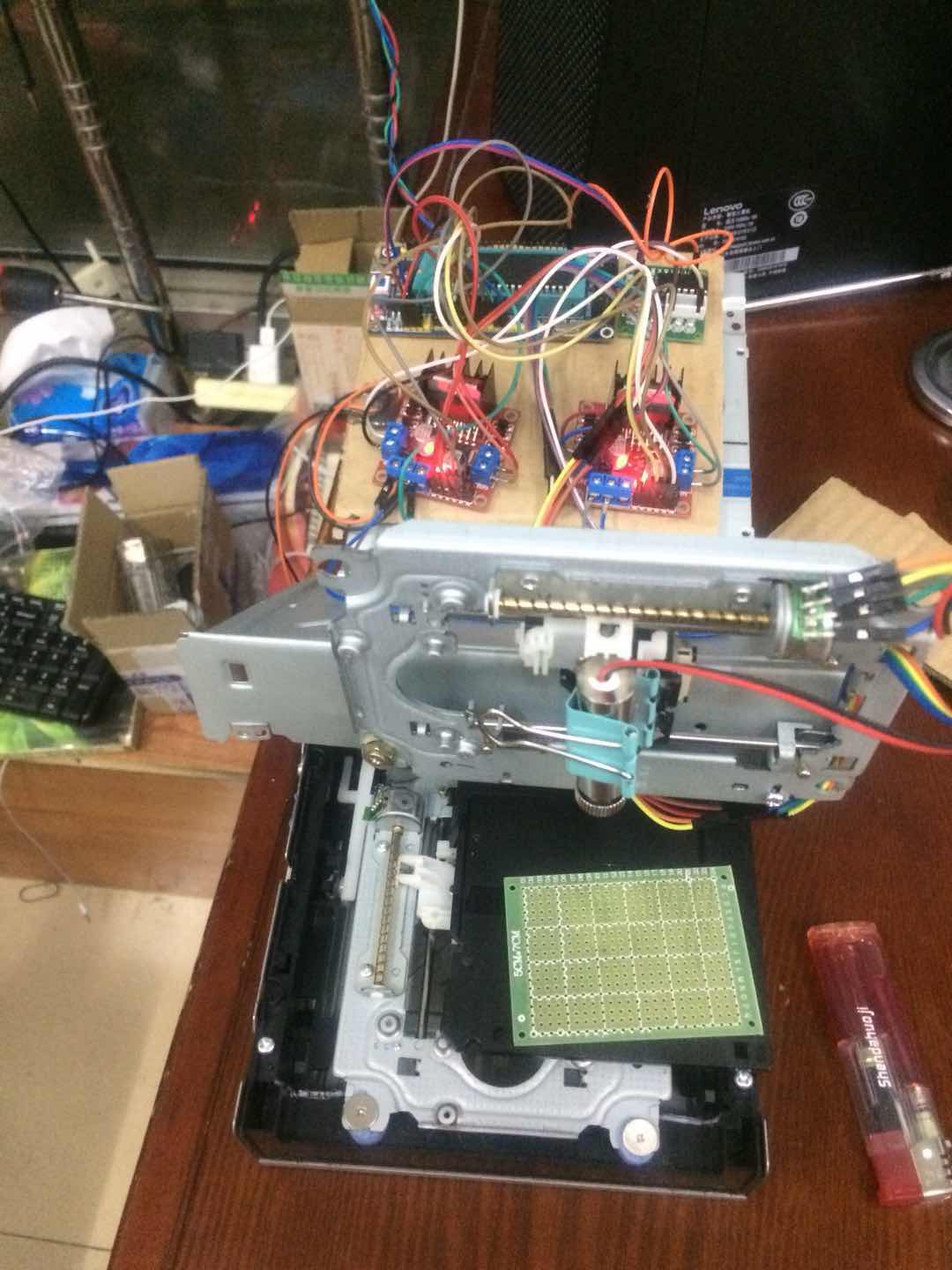
把丝杆与步进电机这样固定住,小铁棒就是激光的位置。↓


这个铁棒是为了让它垂直的↓
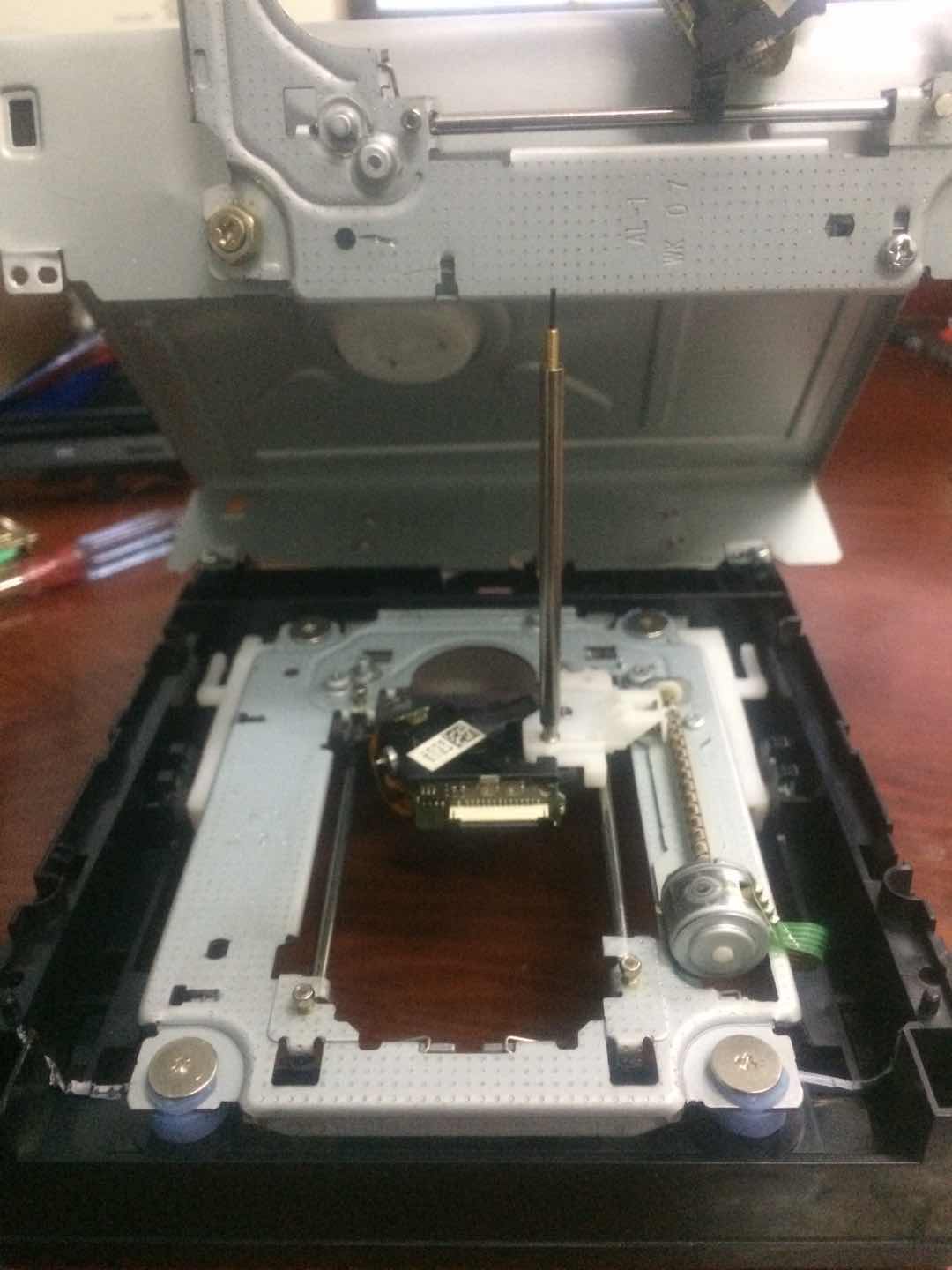


这个古代软盘就是工作台,哈哈全是废物利用↓

开始焊接杜邦线↓

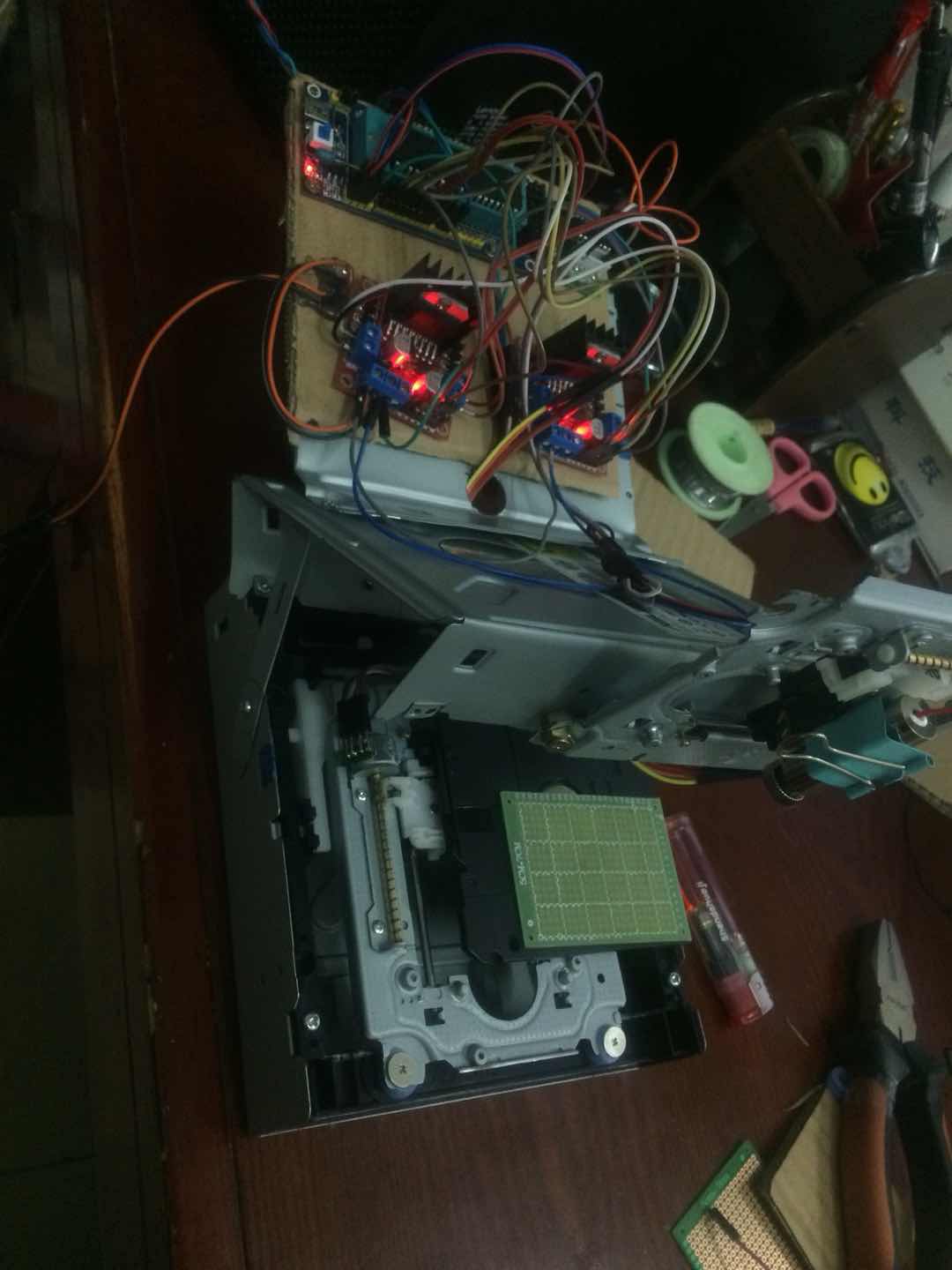
风骚的走线↓
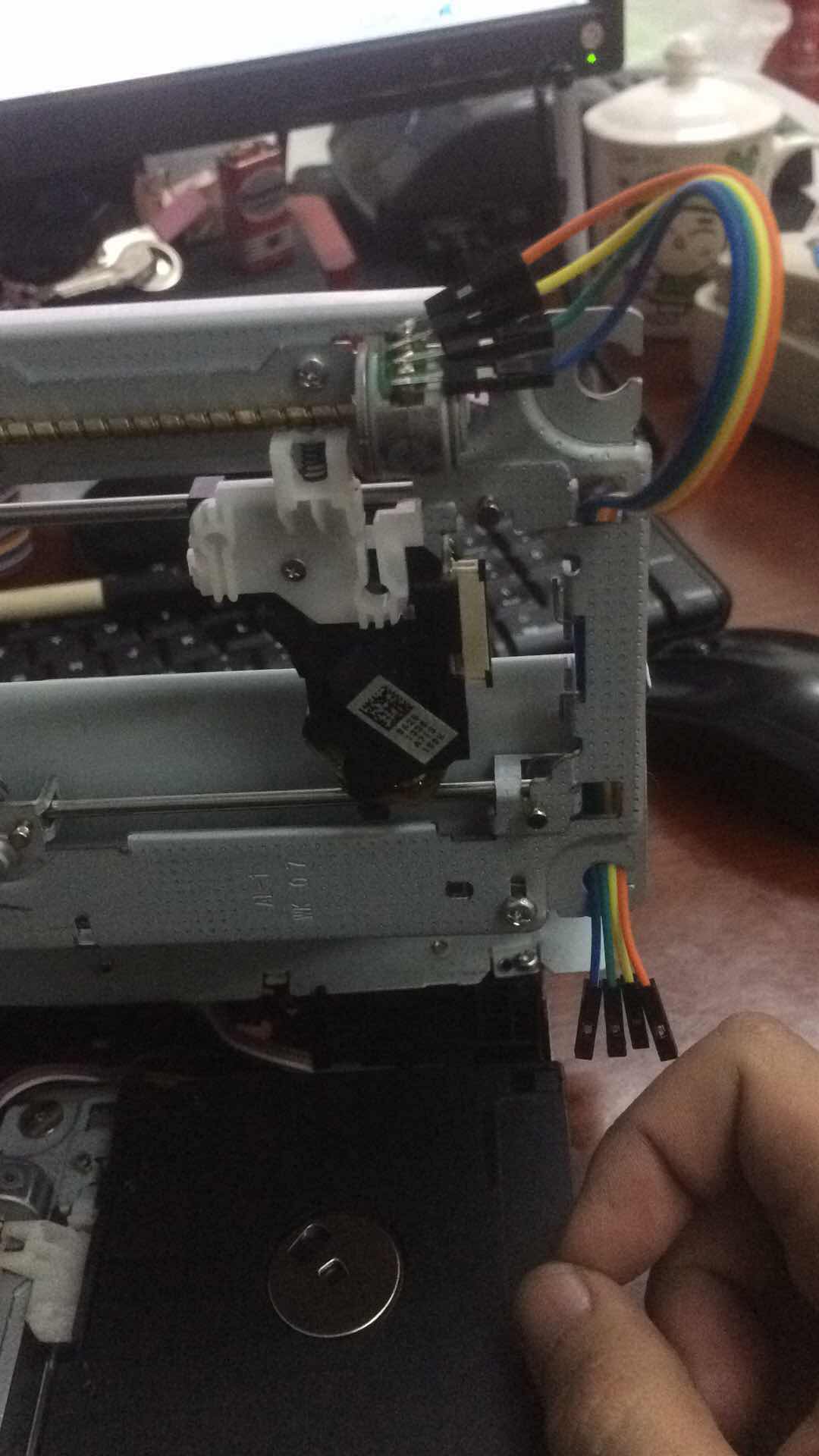
依然风骚↓



接线图,简单画一下。

台式机光驱 x2
l298n电机驱动模块 x2
51最小系统 x1
usb-ttl模块 x1
uln2003模块 x1
250mw激光模组 x1
导线若干
单片机源程序如下:
- /*z地址定义
- 50 1=x+,2=x-,3=y+,4=y-
- 51 前进后退步数高
- 52 前进后退步数低
- 53
- 54/55 字宽
- 56
- 57 弱光开关
- 58/59 激光强度
- 60 x轴速度
- 61 y轴速度
- 62 开始打印0,57
- 63 暂停
- 64 停止标志
- 65
- 66 左右标记
- 100开始时灰度图数据
- */
- #include <reg52.h>
- #define uint unsigned int
- #define uchar unsigned char
- #define N z[60] //X速度
- #define M z[61] //Y速度
- sbit a=P1^3;//步进电机接线定义 移动激光头
- sbit a_=P1^2;
- sbit b=P1^1;
- sbit b_=P1^0;
- sbit xa=P1^4;
- sbit xa_=P1^5;
- sbit xb=P1^6;
- sbit xb_=P1^7;
- /*sbit a=P1^4;//步进电机接线定义 移动底板
- sbit a_=P1^5;
- sbit b=P1^6;
- sbit b_=P1^7;
- sbit xa=P1^3;
- sbit xa_=P1^2;
- sbit xb=P1^1;
- sbit xb_=P1^0; */
- sbit jg=P2^0;
- sbit led=P2^1;//指示灯
- uchar xdata z[500]={0};//缓存
- uchar buff[3];//串口缓存
- uchar x1,x0,y1,y0,cont2=0;
- uchar xfb=4,yfb=4;//走步标志位
- unsigned char HighRH = 0; //高电平重载值的高字节
- unsigned char HighRL = 0; //高电平重载值的低字节
- unsigned char LowRH = 0; //低电平重载值的高字节
- unsigned char LowRL = 0; //低电平重载值的低字节
- void delayms(uint xms)
- {
- uint i,j;
- for(i=xms;i>0;i--) //i=xms即延时约xms毫秒
- for(j=110;j>0;j--);
- }
- /* 配置并启动PWM,fr-频率,dc-占空比 */
- void ConfigPWM(unsigned int fr, unsigned char dc)
- {
- unsigned int high, low;
- unsigned long tmp;
-
- tmp = (11059200/12) / fr; //计算一个周期所需的计数值
- high = (tmp*dc) / 100; //计算高电平所需的计数值
- low = tmp - high; //计算低电平所需的计数值
- high = 65536 - high + 12; //计算高电平的重载值并补偿中断延时
- low = 65536 - low + 12; //计算低电平的重载值并补偿中断延时
- HighRH = (unsigned char)(high>>8); //高电平重载值拆分为高低字节
- HighRL = (unsigned char)high;
- LowRH = (unsigned char)(low>>8); //低电平重载值拆分为高低字节
- LowRL = (unsigned char)low;
- TMOD &= 0xF0; //清零T0的控制位
- TMOD |= 0x01; //配置T0为模式1
- TH0 = HighRH; //加载T0重载值
- TL0 = HighRL;
- ET0 = 1; //使能T0中断
- TR0 = 1; //启动T0
- jg = 1; //输出低电平,关闭激光
- }
- /* 关闭PWM */
- void ClosePWM()
- {
- TR0 = 0; //停止定时器0
- ET0 = 0; //禁止定时器0中断
- jg = 1; //输出低电平,关闭激光
- }
- /* T0中断服务函数,产生PWM输出 */
- void InterruptTimer0() interrupt 1
- {
- if (jg == 1) //当前输出为低电平时,装载高电平值并输出高电平
- {
- TH0 = LowRH;
- TL0 = LowRL;
- jg = 0;
- }
- else //当前输出为高电平时,装载低电平值并输出低电平
- {
- TH0 = HighRH;
- TL0 = HighRL;
- jg = 1;
- }
- }
- void xfor(uint i) //x轴前进函数,前进多少步
- {
- while(1)
- {
- if(xfb==4)
- {
- xa=xb=1;
- xb_=xa_=0;
- xfb=1;
- i--;
- delayms(N);
- if(i==0){xa=xb=0; break;}
- }
- if(xfb==1)
- {
- xb=xa_=1;
- xa=xb_=0;
- xfb=2;
- i--;
- delayms(N);
- if(i==0){xa_=xb=0; break;}
- }
- if(xfb==2)
- {
- xa_=xb_=1;
- xb=xa=0;
- xfb=3; //走步标志位
- i--;
- delayms(N);
- if(i==0){xa_=xb_=0; break;}
- }
- if(xfb==3)
- {
- xa_=xb=0;
- xb_=xa=1;
- xfb=4;
- i--;
- delayms(N);
- if(i==0){xa=xb_=0; break;}
- }
- }
- }
- void xbac(uint i) //xxx后退函数
- {
- while(1)
- {
- if(xfb==1)
- {
- xa_=xb=0;
- xb_=xa=1;
- xfb=4;
- i--; //走步标志位
- delayms(N);
- if(i==0){xa=xb_=0; break;}
- }
- if(xfb==4)
- {
- xa_=xb_=1;
- xb=xa=0;
- xfb=3;
- i--;
- delayms(N);
- if(i==0){xa_=xb_=0; break;}
- }
- if(xfb==3)
- {
- xb=xa_=1;
- xa=xb_=0;
- xfb=2; //走步标志位
- i--;
- delayms(N);
- if(i==0){xa_=xb=0; break;}
- }
- if(xfb==2)
- {
- xa=xb=1;
- xb_=xa_=0;
- xfb=1;
- i--;
- delayms(N);
- if(i==0){xa=xb=0; break;}
- }
- }
- }
- void yfor(uint i) //y轴前进函数
- {
- while(1)
- {
- switch(yfb)
- {
- case 4:{a=b=1; b_=a_=0; yfb=1; i--; delayms(M); if(i==0){a=b=0;break;}}
- case 1:{b=a_=1; a=b_=0; yfb=2; i--; delayms(M); if(i==0){a_=b=0;break;}}
- case 2:{a_=b_=1; b=a=0; yfb=3; i--; delayms(M); if(i==0){a_=b_=0;break;}}
- case 3:{b_=a=1; a_=b=0; yfb=4; i--; delayms(M); if(i==0){a=b_=0;break;}}
- }
- if(i==0) break;
- }
- }
- void ybac(uint i) //yy后退函数
- {
- while(1)
- {
- switch(yfb)
- {
- case 1:{a=b_=1; b=a_=0; yfb=4; i--; delayms(M); if(i==0){a=b_=0;break;}}
- case 4:{b_=a_=1; a=b=0; yfb=3; i--; delayms(M); if(i==0){a_=b_=0;break;}}
- case 3:{a_=b=1; b_=a=0; yfb=2; i--; delayms(M); if(i==0){a_=b=0;break;}}
- case 2:{b=a=1; a_=b_=0; yfb=1; i--; delayms(M); if(i==0){a=b=0;break;}}
- }
- if(i==0) break;
- }
- }
- void dazi(uint zik)//打印函数 ******打印函数已更改******
- {
- uint x;
- jg=0;
-
- for(x=0;x<zik;x++)//执行zik个循环,x轴右移zik步
- {
- while(z[63]); //暂停等待
- if(z[64]==1) break;//停止标志 跳出循环
- SBUF=255; // 每开始打印一个点,向上位机发送255,上位机进度显示用
- jg=0; //开激光
- delayms((z[99+x]*(z[58]*256+z[59]))/100);
- jg=1; //关闭激光
- if(z[66]==1)
- {
- xbac(1);
- }
- else
- {
- xfor(1);
- }
- }
- if(z[64==1]) z[64]=0;
- else{yfor(1);} //y轴进一行
- z[62]=0; //一行打印完成
- SBUF=1; //发送信息,表示打印一行完成
-
- }
- /* 串口配置函数,baud-通信波特率 */
- void ConfigUART(unsigned int baud)
- {
- SCON = 0x50; //配置串口为模式1
- TMOD &= 0x0F; //清零T1的控制位
- TMOD |= 0x20; //配置T1为模式2
- TH1 = 256 - (11059200/12/32)/baud; //计算T1重载值
- TL1 = TH1; //初值等于重载值
- ET1 = 0; //禁止T1中断
- ES = 1; //使能串口中断
- TR1 = 1; //启动T1
- }
- void chuanlo() interrupt 4
- {
- if(RI)
- {
- buff[cont2]=SBUF;//每次3字节,地址高,地址低,数据,,
-
- cont2++;
- if(cont2==3)//每收3个字节,把数据写入地址中
- {
- z[(buff[0]*256)+buff[1]]=buff[2];
- cont2=0;
- SBUF=0; //*****************在这里加入这行代码测试一下*******************************
- }
- RI=0;
-
- }
- if(TI)
- {
- TI=0;
- }
- }
- ……………………
- …………限于本文篇幅 余下代码请从51黑下载附件…………
所有资料51hei提供下载:
 激光雕刻,激光切割,OK.rar
(564.91 KB, 下载次数: 294)
激光雕刻,激光切割,OK.rar
(564.91 KB, 下载次数: 294)
|




 [复制链接]
[复制链接]





 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩

