超声波测距资料:内涵原理图电路图,程序,以及pcb,实训报告。

全部资料51hei下载地址:
 超声波测距.rar
(3.77 MB, 下载次数: 903)
超声波测距.rar
(3.77 MB, 下载次数: 903)
单片机课程设计报告 学 院 电子信息科学学院 设 计 题 目 超声波测距 专 业 名 称 电子信息工程 班 级 XXXXX 学号、姓 名 XXXXXXXXXXXXXXXXXXXXXX 指 导 教 师 XXXXXX 2018年 1 月 10日
目录
摘要: 1 系统设计目的、要求、总体方案及硬件设计 1 设计目的和要求 1.1设计目的 1.2设计要求 2 硬件电路设计 2.1总体方案设计 2 单元电路设计 2.1晶振电路 2.2复位电路 2.3电源设计部分 2.4 8位数码管显示电路 2.5报警电路设计 2.6超声波测距模块 2.7 超声波传感器原理 2.9按键电路 2.10硬件电路总图 3 软件设计 3.1 主程序流程图 3.2超声波测距模块流程图 4 pr otel软件仿真及PCB板 4.1 原理图的绘制 4.2 Protues仿真结果 4.3 Pcb图 5 实验结果 程序: 总结 附录 参考文献
超声波测距 摘要: 超声波指向性强,能量消耗缓慢,在介质中传播的距离比较远,因此超声波常用于障碍物的距离测量。由于超声波可以做到无接触检测距离,这一特性在人体获其他物体高度的测量上会非常方便。本设计采用以AT89C51为核心的低成本、高精度、数字显示超声波测距的硬件电路和软件设计方法。整个电路采用模块化设计,由主程序、中断程序、HC-RS04超声波传感器的发射接受程序、显示子程序等模块组成。最终通过电路来实现测距功能,当距离小于设定值或距离超过程序设定最远距离值启动报警机制。
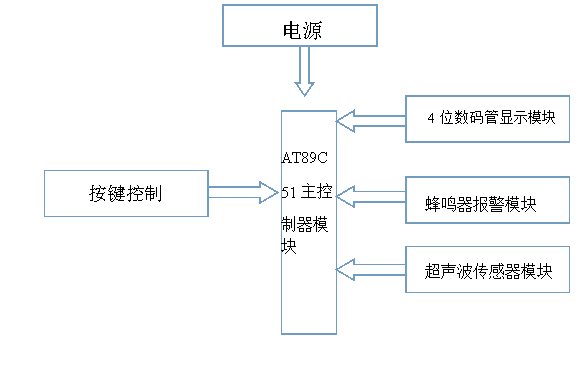
关键词 AT89C51单片机;HC-SR04超声波传感器;蜂鸣器; 1 系统设计目的、要求、总体方案及硬件设计1 设计目的和要求1.1设计目的了解超声波测距原理; 根据超声波测距原理,设计超声波测距仪的硬件结构电路和软件程序; 1.2设计要求 1.自己设定测量距离,要求做到测量距离精确; 2.以数码管的形式显示测量的距离; 3.用蜂鸣器以及二极管实现报警功能; 4.报警距离必须可调; 2 硬件电路设计2.1总体方案设计 按模块划分可分为数据采集、按键控制、数码管显示、发光二极管和蜂鸣器报警四个子模块。电路结构划分可以划分为:超声波传感器、蜂鸣器、单片机控制电路。本次设计的核心是单片机控制模块,所以此设计是单片机应用系统 的一种应用。系统采用STC89C51RD+单片机作为核心控制单元,当测量距离小于设定距离时,主控芯片将测量的距离与设定值进行比较处理,然后控制蜂鸣器报警。系统总体的设计框图如图所示:
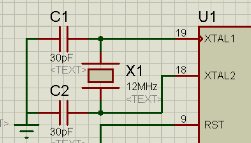
图一:总体方案设计 2 单元电路设计2.1晶振电路AT89C51虽然有内部振荡电路,但要形成时钟,必须外部附加电路。AT89C51单片机的时钟产生方法有两种。内部时钟方式和外部时钟方式。 晶振是给单片机提供工作信号脉冲的 这个脉冲就是单片机的工作速度 比如 12M晶振单片机工作速度就是每秒12M 当然单片机的工作频率是有范围的不能太大 一般24M就不上去了不然不稳定。 本次设计采用的是内部时钟方式:
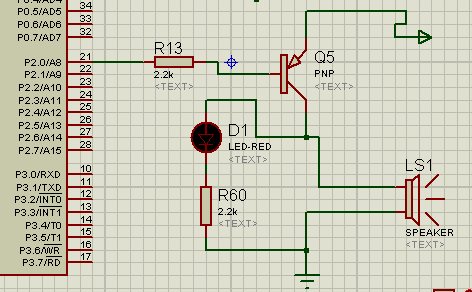
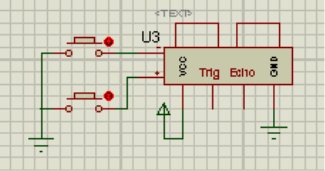
如图二所示:晶振与单片机的脚XTAL0和脚XTAL1内部的振荡电路便产生自激振荡。构成的振荡电路中会产生偕波(也就是不希望存在的其他频率的波) 这个波对电路的影响不大 但会降低电路的时钟振荡器的稳定性。为了电路的稳定性起见 ATMEL公司只是建议在晶振的两引脚处接入两个10pf-50pf的瓷片电容接地来削减偕波对电路的稳定性的影响所以晶振所配的电容在10pf-50pf之间都可以的没有什么计算公式。 因为一个机器周期含有6个状态周期,而每个状态周期为2个振荡周期,所以一个机器周期共有12个振荡周期,如果外接石英晶体振荡器的振荡频率为12MHZ,一个振荡周期为1/12us,故而一个机器周期为1us。如图7所示为时钟电路。 图二:晶振电路 2.2复位电路 在电路图中,电容的的大小是1uf,电阻的大小是100。所以根据公式,可以算出电容充电到电源电压的0.7倍(单片机的电源是5V,所以充电到0.7倍即为3.5V),需要的时间是100*1UF=0.0001S。也就是说在电脑启动的0.0001S内,电容两端的电压时在0~3.5V增加。这个时候100电阻两端的电压为从5~1.5V减少(串联电路各处电压之和为总电压)。所以在0.0001S内,RST引脚所接收到的电压是5V~1.5V。在5V正常工作的51单片机中小于1.5V的电压信号为低电平信号,而大于1.5V的电压信号为高电平信号。所以在开机0.0001S内,单片机系统自动复位(RST引脚接收到的高电平信号时间为0.0001S左右)。 复位方法有上电自动复位和手动复位两种,单片机在时钟电路工作以后, 在RESET端持续给出2个机器周期的高电平时就可以完成复位操作。例如使用晶振频率为12MHz时,则复位信号持续时间应不小于2us。本设计采用的是自动复位电路。如图3示为复位电路。 图三:复位电路 2.3电源设计部分 三节5号电池共4.5V 2.4 8位数码管显示电路本电路的显示首先考虑到两种方案,一种数码管显示,另外一种是LCD屏幕显示。LCD屏幕显示虽然看得比较清晰,但是成本较高。所以从节约成本的角度出发决定使用4位8段数码管,数码管接在P0口需要驱动, 驱动方式一:用芯片74HC573驱动 驱动方式二:用PNP三极管放大从而驱动 驱动方式三:P0口接上拉电阻驱动 综上三种方式考虑,P0口接上拉电阻驱动会比较节约成本,并且接线比较简单,可以减少电路的复杂度。所以最终选择驱动方式三。位选分别接在P1.0-P1.3口,如图四所示: 图四:数码管显示 2.5报警电路设计 当测量距离超过设定的最大距离值时以及测量距离小于报警数时电路会触发报警系统,使得蜂鸣器长响LED灯亮起来,如图五所示: 图五:报警系统 2.6超声波测距模块超声波模块采用现成的HC-SR04超声波模块,该模块可提供 2cm-400cm 的非接触式距离感测功能,测距精度可达高到 3mm。模块包括超声波发射器、接收器与控制电路。基本工作原理:采用 IO 口 TRIG 触发测距,给至少 10us 的高电平信号;模块自动发送 8 个 40khz 的方波如图6,自动检测是否有信号返回;有信号返回,通过 IO 口 ECHO 输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。测试距离=(高电平时间*声速(340M/S))/2。实物如下图7。其中VCC 供5V 电源,GND 为地线,TRIG 触发控制信号输入,ECHO 回响信号输出等四支线。 超声波探测模块HC-SR04的使用方法如下:IO口触发,给Trig口至少10us的高电平,启动测量;模块自动发送8个40Khz的方波并随时检测是否有信号返回,有信号返回,通过Echo输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间,测试距离=(高电平时间*340)/ 2,单位为m。程序中测试功能主要由两个函数完成。 实现中采用定时器0进行定时测量,8分频,TCNTT0预设值0XCE,当timer0溢出中断发生2500次时为125ms,计算公式为(单位:ms): T = (定时器0溢出次数 * (0XFF - 0XCE))/ 1000 其中定时器0初值计算依据分频不同而有差异。
图六:Tring触发波形
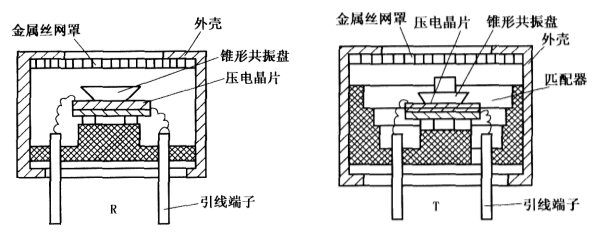
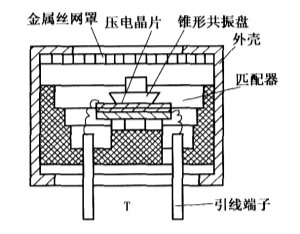
图七:超声波传感器HC-SR04 和仿真图 2.7 超声波传感器原理市面上常见的超声波传感器多为开放型,其内部结构如图8所示,一个复合式振动器被灵活地固定在底座上。该复合式振动器是由谐振器以及一个金属片和一个压电陶瓷片组成的双压电晶片元件振动器。谐振器呈喇叭形,目的是能有效地辐射由于振动而产生的超声波,并且可以有效地使超声波聚集在振动器的中央部位。 当电压作用于压电陶瓷时,就会随电压和频率的变化产生机械变形。另一方面,当振动压电陶瓷时,则会产生一个电荷。利用这一原理,当给由两片压电陶瓷或一片压电陶瓷和一个金属片构成的振动器,所谓叫双压电晶片元件,施加一个电信号时,就会因弯曲振动发射出超声波。相反,当向双压电晶片元件施加超声振动时,就会产生一个电信号。基于以上作用,便可以将压电陶瓷用作超声波传感器。
图8 超声波内部结构 超声波是一种在弹性介质中的机械振荡,其频率超过20KHz,分横向振荡和纵向振荡两种,超声波可以在气体、液体及固体中传播,其传播速度不同。它有折射和反射现象,且在传播过程中有衰减。 2.8测距分析 超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离(s),即:s=340t/2 最常用的超声测距的方法是回声探测法,超声波发射器向某一方向发射超声波,在发射时刻的同时计数器开始计时,碰到障碍物的阻挡就立即反射回来,超声波接收器收到反射回的超声波就立即停止计时并计算出距离。以超声波在空气中的传播速度为340m/s计算,根据定时器算出的时间t,就可以计算出发射点距障碍物面的距离s,即:s=340t/2。 由于超声波也是一种声波,其声速V与温度有关。在使用时,如果传播介质温度变化不大,则可近似认为超声波速度在传播的过程中是基本不变的。如果对测距精度要求很高,则应通过温度补偿的方法对测量结果加以数值校正。声速确定后,只要测得超声波往返的时间,即可求得距离。这就是超声波测距的基本原理。如图9所示:
图9 超声波的测距原理  (3-1) (3-1)
 (3-2) (3-2)
式中:L---两探头之间中心距离的一半. 又知道超声波传播的距离为:  ( 3-3) ( 3-3)式中:v—超声波在介质中的传播速度; t—超声波从发射到接收所需要的时间. 将(3—2)、(3—3)代入(3-1)中得:  ( 3-4) ( 3-4)其中,超声波的传播速度v在一定的温度下是一个常数(例如在温度T=30度时,V=349m/s);当需要测量的距离H远远大于L时,则(3—4)变为:  ( 3-5) ( 3-5) 所以,只要需要测量出超声波传播的时间t,就可以得出测量的距离H. 2.9按键电路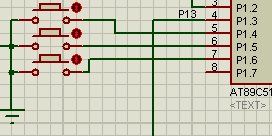 本设计设置了三个按键开关,链接P1.4的按键负责报警数的加一操作,连接P1.5的按键负责报警数的减一操作,连接P1.6的按键负责模式的选择。模式0:超声波测距模式,模式1:设置报警数如图10所示: 本设计设置了三个按键开关,链接P1.4的按键负责报警数的加一操作,连接P1.5的按键负责报警数的减一操作,连接P1.6的按键负责模式的选择。模式0:超声波测距模式,模式1:设置报警数如图10所示:
图10:按键开关 2.10 硬件电路总图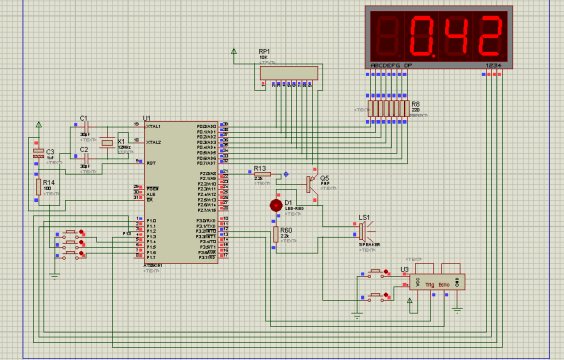
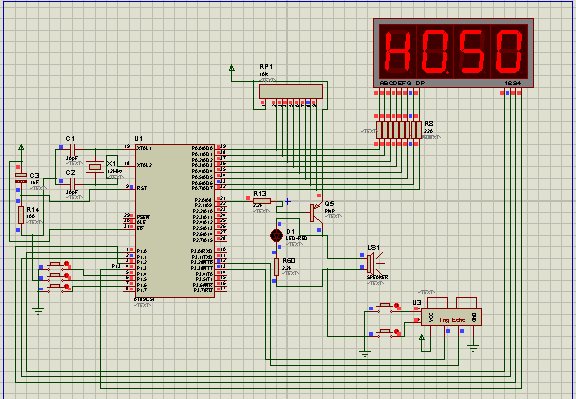
图10:超声波测距模式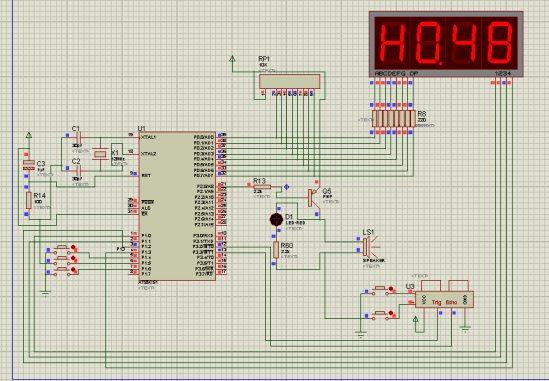
11:调节报警数
3 软件设计
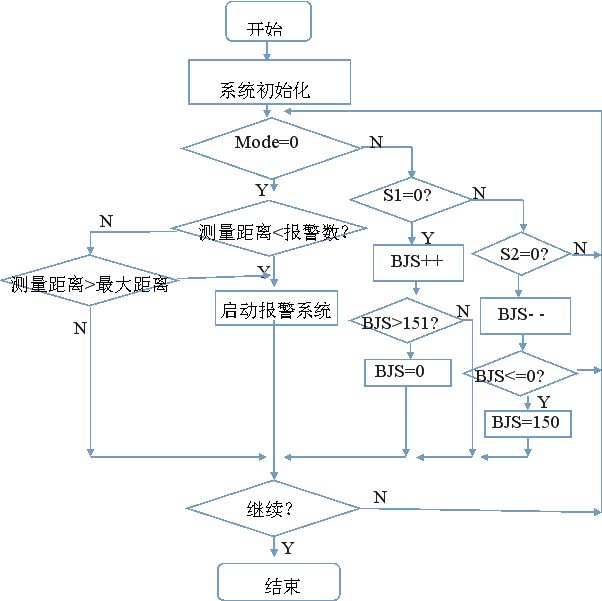
3.1 主程序流程图 按工作原理和硬件电路图得到主流程图如下:
主流程图
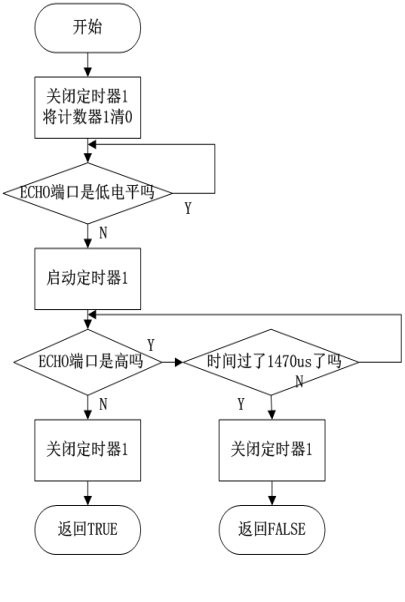
3.2超声波测距模块流程图
超声波测试模块流程
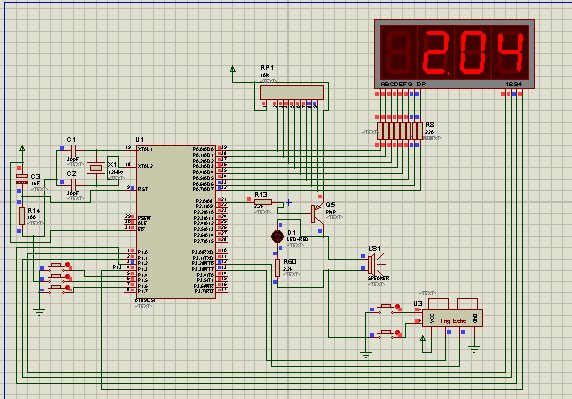
4 protel软件仿真及PCB板 仿真平台为Proteus软件,Proteus软件是世界上著名的EDA工具(仿真软件),能完成原理图布图、代码调试到单片机与外围电路协同仿真,一键切换到PCB设计它不仅具有其它EDA工具软件的仿真功能,还能仿真单片机及外围器件,是目前最好的仿真单片机及外围器件的工具。 PROTEUS电路设计是在PROTEUS ISIS环境中绘制的,该编辑环境具有良好的人机交互界面,功能强大极易上手。首先通过桌面进入主程序,绘制原来图的主要任务是从元件库中选取绘制电路所需要的元件。可以通过点击选择器顶端左侧的“P”或者通过命令打开,我们常用的是按钮;在查找到并放置完所有需要的器件后,我们需要接着连接元件,即在PROTEUS ISIS的编辑窗口布线。PROTEUS ISIS中没有布线模式,但用户可以在任意时刻放置连线和编辑连线。在完成绘制所需的电路图前,用户需要放置并连接断轴。在电路原理图中放置两种通用的端子,一种是接地端子一种是电源端子。当在PROTEUS ISIS编辑窗口放置元件时,每一元件都有唯一的元件标号及元件值与之对应。原件号是PROTEUS ISIS的实时注释功能自动标注的,这一功能可在菜单中设置选择是否开启。PROTEUS ISIS中也支持块操作,当用户需要对电路中的某一部分进行操作时,可以使用该功能。系统共支持块移动、块复制、块旋转、块删除等实用功能,充分利用这些功能可以极大的提高我们绘图的效率。我们绘制完所有的元件后,最后进行统一标注,PROTEUS ISIS支持注释功能,可以把我们所绘制的原理图中的器件根据我们的需要添加上特殊的注释,以表示特定的含义。根据设计电路绘制完后的电路图如图4-1所示。 4.1 原理图的绘制
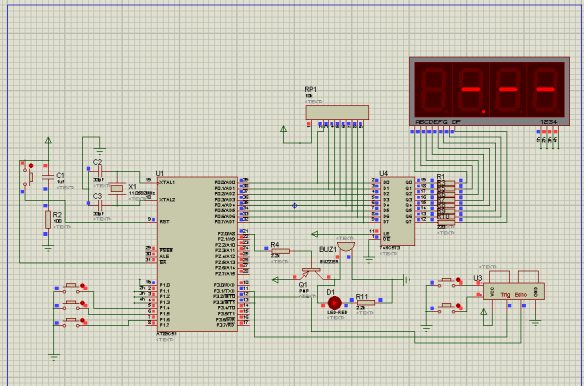
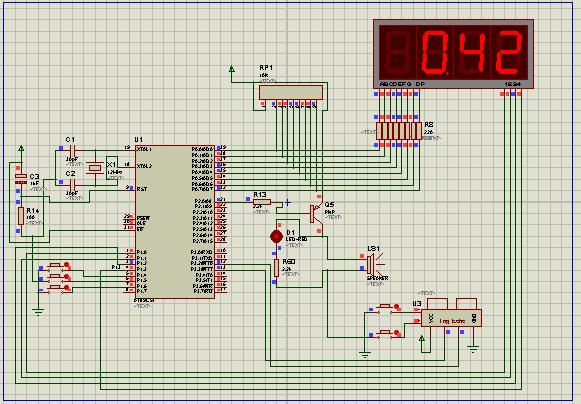
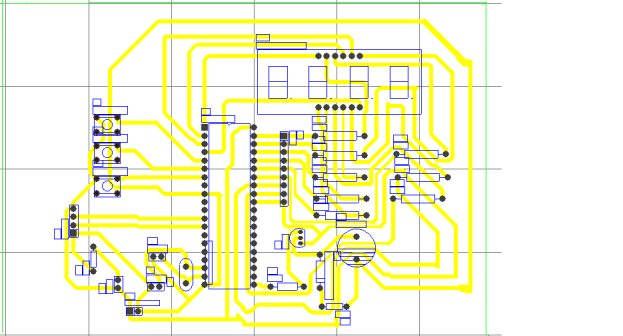
图4-1 4.2 Protues仿真结果模式0:测量距离 模式1:调节报警数 测量距离超过4米 测量距离小于报警数 4.3 Pcb图
5 实验结果
单片机源程序如下:
- #include <reg52.H>//器件配置文件
- #include <intrins.h>
- //传感器接口
- sbit RX = P3^2;
- sbit TX = P3^3;
- //按键声明
- sbit S1 = P1^4;
- sbit S2 = P1^5;
- sbit S3 = P1^6;
- //蜂鸣器
- sbit Feng= P2^0;
- sbit W1=P1^0;
- sbit W2=P1^1;
- sbit W3=P1^2;
- sbit W4=P1^3;
- //变量声明
- unsigned int time=0;
- unsigned int timer=0;
- unsigned char posit=0;
- unsigned long S=0;
- unsigned long BJS=50;//报警距离80CM
- //模式 0正常模式 1调整
- char Mode=0;
- bit flag=0;
- bit flag_KEY=0;
- unsigned char const discode[] ={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x40,0xff/*-*/};
- //数码管显示码0123456789-和不显示unsigned char const positon[4]={0xfd,0xfb,0xf7,0xfe}; //位选
- unsigned char disbuff[4] ={0,0,0,0}; //数组用于存放距离信息
- unsigned char disbuff_BJ[4] ={0,0,0,0};//报警信息
- void Display();
- //延时20ms(不精确)
- void delay(void)
- {
- unsigned char a,b,c;
- for(c=2;c>0;c--)
- for(b=38;b>0;b--)
- for(a=60;a>0;a--);
- }
- //按键扫描
- void Key_()
- {
- if(flag_KEY==0)
- {
- if(Mode!=0)
- {
- //+
- if(S1==0)
- {
- delay(); //延时去抖
- if(S1==0)
- {
- BJS++; //报警值加
- flag_KEY=1;
- if(BJS>=151) //最大151
- {
- BJS=0;
- }
- // while(S1==0)
- // Display();
- }
-
- }
- //-
- if(S2==0)
- {
- delay();
- if(S2==0)
- {
- BJS--; //报警值减
- flag_KEY=1;
- if(BJS<=1) //最小1
- {
- BJS=150;
- }
- // while(S2==0)
- // Display();
- }
-
- }
- }
- //功能
- if(S3==0) //设置键
- {
- delay();
- if(S3==0)
- {
- Mode++; //模式加
- flag_KEY=1;
- if(Mode>=2) //加到2时清零
- {
- Mode=0;
- }
- while(S3==0)
- Display();
- }
- }
- }
- if((P1&0x70)==0x70)
- {
- flag_KEY=0;
- }
- }
- /**********************************************************************************************************/
- //扫描数码管
- void Display(void)
- {
- //正常显示
- if(Mode==0)
- {
- P0=0x00; //关闭显示
- if(posit==1)//数码管的小数点
- {
- P0=(discode[disbuff[posit]])|0x80;//按位或,最高位变为1,显示小数点
- }
- else if(posit==0)
- {
- P0=~discode[11];
- }
- else
- {
- P0=discode[disbuff[posit]];
- }
- switch(posit)
- {
- case 0 : W1=0;W2=1;W3=1;W4=1; break;
- case 1 : W1=1;W2=0;W3=1;W4=1; break;
- case 2 : W1=1;W2=1;W3=0;W4=1; break;
- case 3 : W1=1;W2=1;W3=1;W4=0; break;
- }
- posit++;
- if(posit>3) //每进一次显示函数,变量加1
- posit=0; //加到3时清零
- }
- //报警显示
- else
- {
- P0=0x00;
- if(posit==1)//数码管的小数点
- {
- P0=(discode[disbuff_BJ[posit]])|0x80;
- }
- else if(posit==0)
- {
- P0=0x76; //显示字母
- }
- else
- {
- P0=discode[disbuff_BJ[posit]];
- }
- switch(posit)
- {
- case 0 : W1=0;W2=1;W3=1;W4=1; break;
- case 1 : W1=1;W2=0;W3=1;W4=1; break;
- case 2 : W1=1;W2=1;W3=0;W4=1; break;
- case 3 : W1=1;W2=1;W3=1;W4=0; break;
- }
- posit++;
- if(posit>3)
- posit=0;
- }
- }
- /**********************************************************************************************************/
- //计算
- void Conut(void)
- {
- time=TH0*256+TL0; //读出T0的计时数值
- TH0=0;
- TL0=0; //清空计时器
- S=(time*1.7)/100; //算出来是CM
- //声音的速度是340m/s,时间的单位是us,计算到秒需要将时间数据/1000000,
- //长度=速度*时间,340*time/1000000,长度数据单位是m转换成cm需要乘以100得到340*time/10000,
- //小数点都向左移两位得到3.4*time/100,因为超声波是往返了,所以再除以2,得到距离数据(time*1.7)/100
- if(Mode==0) //非设置状态时
- {
- if((S>=700)||flag==1) //超出测量范围显示"-"
- {
- Feng=0; //蜂鸣器报警
- flag=0;
- disbuff[1]=10; //"-"
- disbuff[2]=10; //"-"
- disbuff[3]=10; //"-"
- }
- else
- {
- //距离小于报警距
- if(S<=BJS)
- {
- Feng=0; //报警
- }
- else //大于
- {
- Feng=1; //关闭报警
- }
- disbuff[1]=S%1000/100; //将距离数据拆成单个位赋值
- disbuff[2]=S%1000%100/10;
- disbuff[3]=S%1000%10 %10;
- }
- }
- else
- {
- Feng=1;
- disbuff_BJ[1]=BJS%1000/100;
- disbuff_BJ[2]=BJS%1000%100/10;
- disbuff_BJ[3]=BJS%1000%10 %10;
- }
- }
- /**********************************************************************************************************/
- //定时器0
- void zd0() interrupt 1 //T0中断用来计数器溢出,超过测距范围
- {
- flag=1; //中断溢出标志
- }
- /**********************************************************************************************************/
- //定时器1
- void zd3() interrupt 3 //T1中断用来扫描数码管和计800MS启动模块
- {
- TH1=0xf8;
- TL1=0x30; //定时2ms
- Key_(); //扫描按键
- Display(); //扫描显示
- timer++; //变量加
- if(timer>=400) //400次就是800ms
- {
- timer=0;
- TX=1; //800MS 启动一次模块
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- TX=0;
- }
- }
- /**********************************************************************************************************/
- //主函数
- void main(void)
- {
- TMOD=0x11; //设T0为方式1
- TH0=0;
- TL0=0;
- TH1=0xf8; //2MS定时
- TL1=0x30;
- ET0=1; //允许T0中断
- ET1=1; //允许T1中断
- TR1=1; //开启定时器
- EA=1; //开启总中断
- while(1)
- {
- while(!RX); //当上次接收完波后,RX引脚是低电平,取反就是1,此while成立,反复判断RX状态。当RX没有接收到返回波时是高电平,取反就是0,此while不成立,跳出
- TR0=1; //开启计数
- while(RX); //当RX没有接收到返回波,此while成立,程序停在这里一直判断RX状态。当RX接收到返回波,RX引脚变为低电平,此while不成立,跳出
- ……………………
- …………限于本文篇幅 余下代码请从51黑下载附件…………
| 



 [复制链接]
[复制链接]











 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩 来自 2#
来自 2#




