目录
一、数控回转工作台的原理与应用
1.1数控回转工作台
1.2 设计准则
1.3 主要技术参数
1.4 本章小结
二、数控回转工作台的部分原理及结构设计
2.1 步进电机的原理
2.2 传动方案传动时应满足的要求
2.3数控回转工作台功能的实现
2.4 步进电机的选择及机械系统设计
2.5轴承的选用
2.6 轴承的游隙及轴上零件的调配
2.7 滚动轴承的配合
2.8 滚动轴承的润滑
三、控制和驱动系统设计
3.1 系统方案设计构成
1. 控制系统应满足的条件
2. 控制系统总设计
3. 单片机
四、控制系统仿真
总结
绪论
课程设计主要是培养学生综合应用所学专业的基础理论、基本技能和专业知识的能力,培养学生建立正确的设计思想,掌握工程设计的一般程序、规范和方法。而本科类学生更应侧重于从生产的第一线获得产品的工艺需求和设计思路,获得工程技术经用性岗位的基本训练,通过课程设计,可树立正确的经济观点和全局观点,实现由学生向工程技术人员的过渡。
使学生进一步巩固和加深对所学的知识,使之系统化、综合化。培养学生独立工作、独立思考和综合运用所学知识的技能,提高解决本专业范围内的一般工程技术问题的能力,从而扩大、深化所学的专业知识和技能。培养学生的设计计算、工程绘图、实验研究、数据处理、查阅文献、外文资料的阅读与翻译、计算机应用、文字表达等基本工作实践能力,使学生初步掌握科学研究的基本方法和思路。使学生学会初步掌握解决工程技术问题的正确指导思想、方法手段,树立做事严谨、严肃认真、一丝不苟、实事求是、刻苦钻研、勇于探索、具有创新意识和团结协作的工作作风。
本次课程设计主要是解决数控回转工作台的工作原理和控制系统的设计。设计思路是先功能需求后系统结构。目前数控回转工作台已广泛应用于数控机床和加工中心上,它的总的发展趋势是:在规格上将向两头延伸,即开发小型和大型转台;在性能上将研制以钢为材料的蜗轮,大幅度提高工作台转速和转台的承载能力;在形式上继续研制两轴联动和多轴并联回转的数控转台。
数控转台的市场分析:随着我国制造业的发展,加工中心将会越来越多地被要求配备第四轴或第五轴,以扩大加工范围。估计近几年要求配备数控转台的加工中心将会达到每年600台左右。预计未来5年,虽然某些行业由于产能过剩、受到宏观调控的影响而继续保持着较低的行业景气度外,部分装备制造业将有望保持较高的增长率,特别是那些国家产业政策鼓励振兴和发展的装备子行业。作为装备制造业的母机,普通加工机床将获得年均15%-20%左右的稳定增长
数控机床的圆周进给由回转工作台完成,称为数控机床的第四轴:回转工作台可以与X、Y、Z三个坐标轴联动,从而加工出各种球、圆弧曲线等。回转工作台可以实现精确的自动分度,扩大了数控机床加工范围。
1.1数控回转工作台数控回转工作台主要用于数控镗床和铣床,其外形和通用工作台几乎一样,但它的驱动是伺服系统的驱动方式。它可以与其他伺服进给轴联动。 自动换刀数控镗床的回转工作台的进给、分度转位和定位锁紧都是由给定的指令进行控制的。工作台的运动是由伺服电动机,经齿轮减速后由蜗杆传给蜗轮 。
为了消除蜗杆副的传动间隙,采用了双螺距渐厚蜗杆,通过移动蜗杆的轴向位置宋调整间隙。这种蜗杆的左右两侧面具有不同的螺距,因此蜗杆齿厚从头到尾逐渐增厚。但由于同一侧的螺距是相同的,所以仍然可以保持正常的啮合。
当工作台静止时,必须处于锁紧状态。为此,在蜗轮底部的辐射方向装有8对夹紧瓦,并在底座上均布同样数量的小液压缸。当小液压缸的上腔接通压力油时,活塞便压向钢球,撑开夹紧瓦,并夹紧蜗轮。在工作台需要回转时,先使小液压缸的上腔接通回油路,在弹簧的作用下,钢球抬起,夹紧瓦将蜗轮松开。
回转工作台的导轨面由大型滚动轴承支承,并由圆锥滚柱轴承及双列向心圆柱滚子轴承保持准确的回转中心。数控回转工作台的定位精度主要取决于蜗杆副的传动精度,因而必须采用高精度蜗杆副。在半闭环控制系统中,可以在实际测量工作台静态定位误差之后,确定需要补偿角度的位置和补偿的值,记忆在补偿回路中,由数控装置进行误差补偿。在全闭环控制系统中,由高精度的圆光栅发出工作台精确到位信号,反馈给数控装置进行控制。
回转工作台设有零点,当它作回零运动时,先用挡铁压下限位开关,使工作台降速,然后由圆光栅或编码器发出零位信号,使工作台准确地停在零位。数控回转工作台可以作任意角度的回转和分度,也可以作连续回转进给运动。
1.2 设计准则我们的设计过程中,本着以下几条设计准则
1.在确定设备整体方案时,除了考虑技术性、经济性、体积、重量、耗电等外,可靠性是首先要考虑的重要因素。在满足体积、重量及耗电等于数条件下,必须确立以可靠性、技术先进性及经济性为准则的最佳构成整体方案。
2.在方案论证时,一定要进行可靠性论证。
3.在确定产品技术指标的同时,应根据需要和实现可能确定可靠性指标与维修性指标。
4.对己投入使用的相同(或相似)的产品,考察其现场可靠性指标,维修性指标及对这两种备标的影响因素,以确定提高当前研制产可靠性的有效措施。
5.应对可靠性指标和维修性指标进行合理分配,明确分系统(或分机)、不见、以至元器件的的可靠性指标。
6.提出整机的元器件限用要求及选用准则,拟订元器件优选手册(或清单)
8.在满足技术性要求的情况下,尽量简化方案及电路设计和结构设计 ,减少整机元器件数量及机械结构零件。
9.尽量实施系列化设计。在原有的成熟产品上逐步扩展,抅成系列,在一个型号上不能采用过多的新技术。采用新技术要考虑继承性。
1.3 主要技术参数(1)最大回转半径:80 mm
(2)工作台输出精度:2 mrad
(3)最大承载重量10㎏
(4) 具备自锁功能
1.4 本章小结主要简单介绍毕业设计题目(数控回转工作台)和其发展概况,设计背景、工作原理、设计参数也作了进一步的说明。
2.1 步进电机的原理步进电机是一种能将数字输入脉冲转换成旋转或直线增量运动的电磁执行元件。每输入一个脉冲电机转轴步进一个步距角增量。电机总的回转角与输入脉冲数成正比例,相应的转速取决于输入脉冲频率。
步进电机是机电一体化产品中关键部件之一,通常被用作定位控制和定速控制。步进电机惯量低、定位精度高、无累积误差、控制简单等特点。广泛应用于机电一体化产品中,如:数控机床、包装机械、计算机外围设备、复印机、传真机等。
选择步进电机时,首先要保证步进电机的输出功率大于负载所需的功率。而在选用功率步进电机时,首先要计算机械系统的负载转矩,电机的矩频特性能满足机械负载并有一定的余量保证其运行可靠。在实际工作过程中,各种频率下的负载力矩必须在矩频特性曲线的范围内。一般地说最大静力矩Mjmax大的电机,负载力矩大。
选择步进电机时,应使步距角和机械系统匹配,这样可以得到机床所需的脉冲当量。在机械传动过程中为了使得有更小的脉冲当量,一是可以改变丝杆的导程,二是可以通过步进电机的细分驱动来完成。但细分只能改变其分辨率,不改变其精度。精度是由电机的固有特性所决定。
选择功率步进电机时,应当估算机械负载的负载惯量和机床要求的启动频率,使之与步进电机的惯性频率特性相匹配还有一定的余量,使之最高速连续工作频率能满足机床快速移动的需要。
2.2 传动方案传动时应满足的要求数控回转工作台一般由原动机、传动装置和工作台组成,传动装置在原动机和工作台之间传递运动和动力,并可实现分度运动。在本课题中,原动机采用步进电机,工作台为T形槽工作台,传动装置由齿轮传动和蜗杆传动组成。
合理的传动方案主要满足以下要求:
(1)机械的功能要求:应满足工作台的功率、转速和运动形式的要求。
(2)工作条件的要求:例如工作环境、场地、工作制度等。
(3)工作性能要求:保证工作可靠、传动效率高等。
(4)结构工艺性要求;如结构简单、尺寸紧凑、使用维护便利、工艺性和经济合理等。
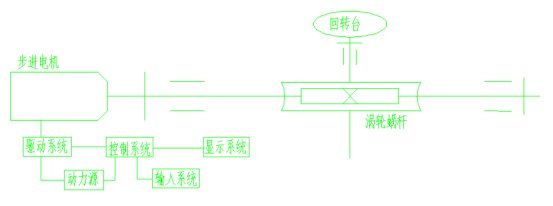
图 1总体设计简图
2.3数控回转工作台功能的实现1、机械部分
采用蜗轮蜗杆减速,蜗轮蜗杄传动平稳,传动比大,因工作台转速较低,所以发热较轻,蜗杆与电机相连,蜗轮与回转台相连。
采用步进电机驱动,选择适当的步距角与传动比便可达到分辨率要求。
2、电气部分
采用专用环形分配器经功率放大电路驱动步进电机。
采用单片机控制环形分配器,并控制显示系统显示控制命令。
采用键盘输入控制命令,单片机进行显示并处理。
2.4 步进电机的选择及机械系统设计许多机械加工需要微量进给。要实现微量进给,步进电机、直流伺服交流伺服电机都可作为驱动元件。对于后两者,必须使用精密的传感器并构成闭环系统,才能实现微量进给。在闭环系统中,广泛采用步进电机马达作为执行单元。这是因为步进电机马达具有以下优点:
(1)直接采用数字量进行控制;
(2)转动惯量小,启动、停止方便;
(3)成本低;
(4)无误差积累;
(5)定位准确;
(6)低频率特性比较好;
(7)调速范围较宽;
采用步进电机为驱动单元,其机构也比较简单。通常步进电机每加一个脉冲转过一个脉冲当量;但由于其脉冲当量一般较大,如0.01mm,在数控系统中为了保证加工精度,广泛采用步进电机的细分驱动技术。
1)步进电机的选择
按照工作要求和条件选Y系列一般用途的全封闭自扇冷鼠笼型三相异步电机。
初选电动机步距角1.5°,由所选电动机的步距角和任务书所要求的精度可得传动比i=

,任务书要求分辨率为2mrad。
步进电动机的选用:
滑动导轨副的摩擦系数设为f=0.005,导轨半径为80mm,最大承载重量10kg,则工作台承受的最大转矩

=98*0.005*80*10-3=0.0392,故作用在涡轮上的转矩

=0.0392,蜗杆涡轮减速器有转矩放大作用,螺杆所承受的转矩

=0.003。所以步进电机静转矩不可低于它,由以上数据选的的步进电机如下表所示。
步进电动机转速

(r/min);α为步距角(1.5°)
f为通电频率取f=625;
计算n=156.25(r/min);
2)机械设计
蜗杆传动设计校核
根据GB/T10086-1988的推荐,采用渐开线蜗杆(ZI)
选择材料:蜗杆用45号钢,螺旋齿面淬火,硬度为45-55HRC;涡轮齿圈用铸锡磷青铜,轮芯用灰铸铁。
1.按齿面接触疲劳强度进行设计:
传动中心距

.
1)确定作用在涡轮上的转矩T2
滑动导轨副动摩擦系数f=0.005,导轨半径为50mm,最大轴向载荷为
Fmax=98N,则工作台承受最大转矩Tm=400*0.005*50*10-3
= 0.02 N·m,故作用在涡轮上的转矩T2=20 N·m
2)确定载荷系数K
因工作荷较稳定,故取载荷分布不均匀系数Kβ=1:由表选取使用系数KA=1:由于转速不高,可取动载系数Kv=1:则
K= Kβ*KA*Kv=1*1*1=1
3)确定弹性影响系数Z
因选用的是铸锡磷青铜蜗轮和钢蜗杆相配,故ZE=160MPa2
4)确定接触系数Zρ
先假设蜗轮分度圆直径d1和传动中心距a的比值d1/a=0.35,从图中可查得
Zρ=2.9
5)确定许用接触应力[σH]
根据蜗轮材料为铸锡磷青钢铜ZCuSn10P1,金属模铸造,蜗杆螺旋齿面硬度>45HRC,可从表中查得蜗杆的基本许用应力[σH]’=268Mpa。
应力循环次数N=6jn2Lh=60*1*

*10000=6.7*10^6
寿命系数KHN=

=1.05
则[σH]=KHN*[σH]’= 1.05*268Mpa=281.78Mpa
6)计算中心距
a≥

mm= 4.73mm
取中心距a=50mm,因i=14,故从表取模数m=1.6mm,蜗杆分度圆直径d1=20mm。这时d1/a=0.4,从图中可查得接触系数Zρ’=2.74,因为Zρ’< Zρ因此以上结果可用。
2.蜗杆与蜗轮的主要参数与几何尺寸
1)蜗杆
蜗杆头数Z1=2;轴向齿距Pa=Πm=5.027;直径系数q=12.5:齿顶圆直径
da=23.2mm(ha*=1,c*=0.2);齿根圆直径dn=16.16:分度圆导程角=9°05’25”;蜗杆轴向齿厚Sa=2.5133mm
2)蜗轮
蜗轮齿数Z2=51:变位系数x2=-0.5
验算传动比i=

=

,传动比大于最低传动比14,因而是可以的:
蜗轮分度圆直径d2=mz2=1.6*51mm=81.6 mm
涡轮喉圆直径da2=d2+2ha2=( +2*0.8)=83.2 mm
涡轮齿根圆直径df2=d2-2hf2=( -2*2.72)mm= 76.16mm
涡轮咽喉母圆半径rg2=a-

da2=8.4mm
3.校核齿根弯曲疲劳强度
σF=

YFa2Yβ
当量齿数ZV2=

=52.97
根据X2=-0.5,ZV2=52.97 ,从图中可查得齿形系数YFa2=2.73。
螺旋角系数Yβ=1-

=1-9.09°/140 =0.9351
许用弯曲应力[σF]=[σF]’KFN
从表中可查得 ACuSn10P1制造蜗轮的基本许用弯曲应力[σF]’=56MPA
寿命系数KFN=

=
[σF]=56*0.832Mpa=46.592 Mpa
σF=

*2.73*0.9351=0.239Mpa
弯曲强度是满足的。
4.精度等级公差和表面粗度的确定
考虑到所设计的蜗杆传动是动力传动,属于通用机械减速器,从
GB/T10089-1988圆柱蜗杆、涡轮精度中选择8级精度,侧隙种类为f.标注
为8fGB/T10089-1988。然后由有关手册差得要求的公差项目及表面粗糙度,
此处从略。
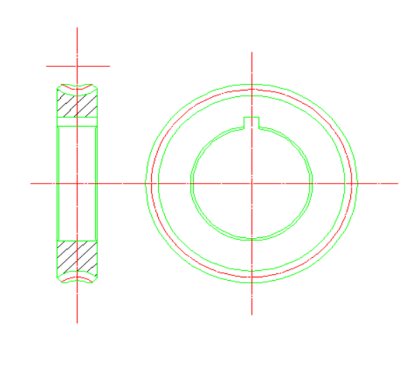
5.蜗轮蜗杆零件图
2.5轴承的选用滚动轴承是现代机器中广泛应用的部件之一。它是依靠主要元件的滚动接触来支撑转动零件的。与滑动轴承相比,滚动轴承摩擦力小,功率消耗少,启动容易等优点。并且常用的滚动轴承绝大多数已经标准化,因此使用滚动轴承时,只要根据具体工作条件
正确选择轴承的类型和尺寸。验算轴承的承载能力。以及与轴承的安装、调整、润滑、密封等有关的“轴承装置设计”问题。
2.6 轴承的游隙及轴上零件的调配轴承的游隙和欲紧时靠端盖下的垫片来调整的,这样比较方便。
2.7 滚动轴承的配合滚动轴承是标准件,为使轴承便于互换和大量生产,轴承内孔于轴的配合采用基孔制,即以轴承内孔的尺寸为基准;轴承外径与外壳的配合采用基轴制,即以轴承的外径尺寸为基准。
2.8 滚动轴承的润滑考虑到电动刀架工作时转速很高,并且是不间断工作,温度也很高。故采用油润滑,转速越高,应采用粘度越低的润滑油;载荷越大,应选用粘度越高的。
3.1 系统方案设计构成- 由键盘输入命令,显示器显示,以直观的判别是否输出对;
- 有复位按键,可以重新输入,重新旋转。
- 回转工作台可以连续旋转定角旋转,分正逆方向;
由键盘按顺序输入五位数字:
第一位:运行方向,“1”为正向运行,“0”为逆向运行,存于18H;
第二位:运行模式,“0”为连续运行模式,“1”为定角度运行模式,存于19H
第三位:运行角度百位数,在连续运行模式时此位无效,在定角度运行模式时此位乘以100即为旋转度数,存于1AH;
第四位:运行角度十位数,在连续运行模式时此位无效,在定角度运行模式时此位乘以10即为旋转度数,存于1BH;
第五位:运行角度个位数,在连续运行模式时此位无效,在定角度运行模式时此位乘以1即为旋转度数,存于1CH;
五位数字输完后,再输入数字没有意义,按下运行键,将17H位置01H,显示程序检测到17H为01H时,跳转运行程序。
LED数码管依次显示输入的数据,边输入边显示,数值输入完后,按下“运行键”,显示程序检测到17H为01H后,停止显示,跳转运行程序,运行程序处理数据后,单片机发出方向信号与CP脉冲信号,控制环形分配器,环形分配器输入三相六拍信号,在经过功率放大电路驱动步进电机。任何时候按下“复位”键,程序从头执行,可以重新输入。
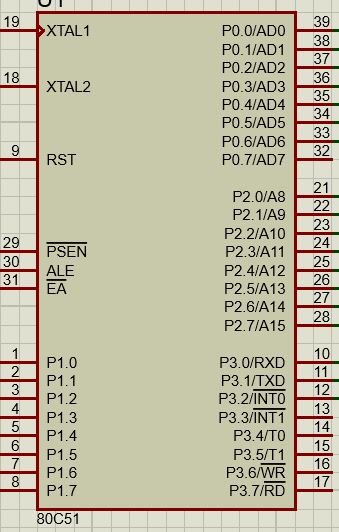
因程序不是很复杂,I/O连接数码管与环形分配器以及连接键盘电路,不需要太多I/O口,故选用80C51单片机,12MHZ振荡器。
图2 80c51
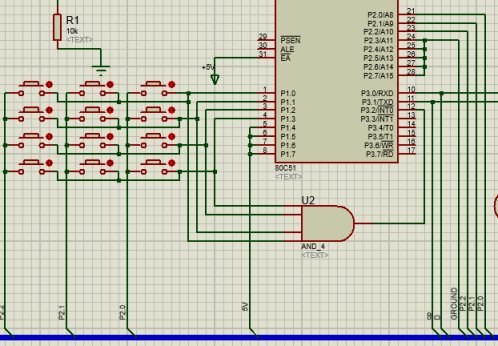
由回转工作台的要求,键盘应有11个键,其中包括“0”“9”“运行键”以及复位键,采用四行三列中断式键盘。
键盘电路如下图;
如图所示,p1.0到p1.3与键盘行线连接,键盘行线通过与门与INTO连接,初始化时p1口写1,p2口写0,按键闭合时,INTO电平由高变低,响应中断,p1口的高电平被p2口的低电平拉低,此时p1口即为行值,接着p2口轮流送高电平,检测p1口电平,当p1口全为高电平时,此时p2口即为列值。接着由行值与列值判断出键值,存于指定位置。键盘扫描程序完毕。按键行列值表如下:
单片机初始程序与键盘扫描程序如下:
- ORG 0000H
- AJMP CHUSHI
- ORG 0003H
- AJMP JPSM;中断0地址
- ORG 0100H
- CHUSHI: MOV SP,#4FH;堆栈区
- MOV TMOD,#00H;置定时器
- SETB IT0;INT0脉冲冲触发方式
- MOV R0,#18H;数据存放首地址
- MOV R1,#00H;存放显示位数
- MOV 17H,#00H;运行标志位置零
- MOV A,#0ffH;P1口置1
- MOV P1,A
- MOV A,#00H
- MOV P2,A
- MOV IE,#81H;开中断
- AJMP DISPLAY
- RETURN: RETI
- JPSM: CLR EA;建盘盘扫描子程序,关闭总中断
- XIAODOU: MOV A,#0FFH;读行线,消除抖动
- MOV P1,A
- MOV A,P1
- MOV R3, A
- LCALL D_10ms;其中D_10ms为延日时子程序.延时10ms
- MOV A,#0FFH
- MOV P1,A
- MOV A, P1
- CJNE A,03H,RETURN;两次结果不一致,转 RETURN,相等则R3中存放行值
- MOV R2,#01H
- SJMP LIEZHI_2
- LIEZHI_1: MOV A, R2
- RL A
- MOV R2,A
- LIEZHI_2: MOV A,R2
- MOV P2,A
- MOV A ,#0FFH
- MOV P1, A
- MOV A,P1
- MOV R4, A
- CJNE R4,#0FFH,LIEZHI_1;相等则R2中存放列值
- MOV A,#00H
- MOV P2,A
- HANG_1 : CJNE R3,#0FEH,HANG_2
- HANG_1_1 : CJNE R2,#01H,HANG_1_2
- MOV @R0, #09H
- INC R0
- SETB EA;开中断
- RETI
- HANG_1_2: CJNE R2,#02H, RETURN
- MOV 17H,01H;置运行标志位
- SETB EA;开中断
- RETI
- HANG_2: CJNE R3 ,#0FDH,HANG_3
- HANG_2_1: CJNE R2,#01H,HANG_2_2
- MOV @R0, #06H
- INC R0
- SETB EA;开中断
- RETI
- HANG_2_2: CJNE R2,#02H,HANG_2_3
- MOV @R0,#07H
- INC R0
- SETB EA;开中断
- RETI
- HANG_2_3: CJNE R2,#04H,RETURN
- MOV @R0,#08H
- INC R0
- SETB EA;开中断
- RETI
- HANG_3: CJNE R3, #0FBH, HANG_4
- HANG_3_1: CJNE R2,#01H,HANG_3_2
- MOV@R0,#03H
- INC R0
- SETB EA;开中断
- RETI
- HANG_3_2: CJNE R2,#02H,HANG_3_3
- MOV @R0, #04H
- INC R0
- SETB EA;开中断
- RETI
- HANG_3_3: CJNE R2, #04, RETURN
- MOV @R0, #05H
- INC R0
- SETB EA;开中断
- RETI
- HANG_4: CJNE R3,#0F7H,RETURN_1
- HANG_4_1: CJNE R2,#01H,HANG_4_2
- MOV @R0, #00H
- INC R0
- SETB EA;开中断
- RETI
- HANG_4_2: CJNE R2,#02H,HANG_4_3
- MOV @R0, #01H
- INC R0
- SETB EA;开中断
- RETI
- HANG_4_3: CJNE R2,#04H,RETURN_1
- MOV @R0, #02H
- INC R0
- SETB EA;开中断
- RETI
- RETURN_1: RETI
其中D-10ms为延时子程序,延时10ms。
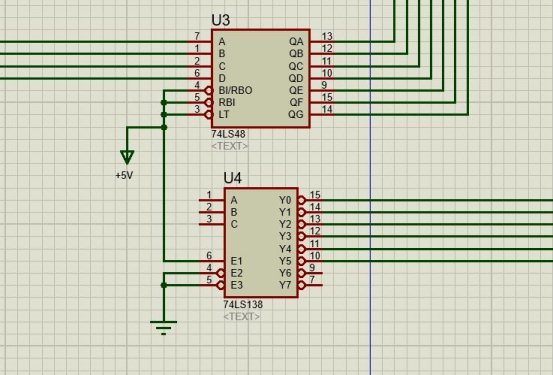
2)显示电路及显示输入的五位数据,因而需要五个LED数码管,选用7SEG-MPX6-CC共阴极数码管,为了输出字位码与字形码,仅用单片机自带I/O脚管是不够的,因而增加74LS48与74LS138,前者输出字形码,后者输出字位码。
图 3 74LS48和74LS138
其中E1连接+5V电压,E1,E2与E3接地,Y0~Y5连接7SEG-MPX6-CC的位码线。
(1)7SEG-MPX6-CC电路
电路连接如下图所示
图 4 7SEG-MPX6-CC
(2)显示程序
#18H送R1,#00H送R5(字位码)
R1是否和R0相等
R5的高四位互换与R1所指数据相互送P0口
延时10ms
R1自加14
R5自加1
DISPLAY: MOV A,17H
JNZ YUNXING
MOV R5, #00H;字位码
MOV R1, #18H
XIANSHI: MOV A,R1
CJNE A ,00H, XUNHUAN
AJMP DISPLAY
XUNHUAN: CJNE A,#1DH, XUNHUAN_1
AJMP DISPLAY
XUNHUAN_1: MOV A,@R1
MOV R7, A;R7的低四位放字形码,高四位放字形码
MOV A, R5
SWAP A
ORL A,R7
MOV P0,A
LCALL D_10ms
INC R5
INC R1
AJMP XIANSHI
3)运行程序
单片机输出CP脉冲频率:
使用定时器0,门控位GATE置0,以运行控制位TR0启动定时器,C/T位置0,采用定时工作方式,M1M0=00,定时器采用0方式,ET0置0,禁止定时/计数中断,CH250的CP脉冲频率由前所述应为625HZ,固定时器所定时间应为
1/625*2s=800us
(2^13-x)*1/2*12us=800us
进制转换: x=2^13-800=7392=1110011100000B
所以TH0=#0E7H,TLO=#00H
(1)模式0,连续回转模式
程序如下:
YUNXING: CLR EA;禁止中断
MOV A,18H;18H中存放方向标志位
CJNE A, #00H, FX_1;18H不为0则转FX1
FX_0: CLR 00H
MOV C,00H;将CY置0
MOV P3.0,C;将CY值送P3.0,P3.0连接CH250的CP口
AJMP YS
FX_1: CLR 01H
MOV C, 00H;将CY置1
MOV P3.0, C;将CY值送P3.0,P3.0连接CH250的CP口
YS: MOV A,19H
CJNE A,#00H, MODEL_1;19H若为#00H则为0模式,不跳转
MODEL_0: CLR P3.1
LOOP_1: CPL P3.1
CLR TF0;清定时器0的溢出标志位
MOV TH0, #0E7H;置定时器初值
MOV TL0, #00H
SETB TR0;开始定时
LOOP_2: JBC TF0, LOOP_1;如果定时器0溢出转LOOP1,否则继续续检测
AJMP LOOP_2
(2)模式1,定角度模式
i=51/2=25.5
工作台转1°则步进电机需转60′/(1.5°×60/25.5)=17步,因定时器到时两次步进电机旋一个步距角,所以定时器到时34次,工作台旋转1°为了利于程序编制,将程序分为三部分,第一部分为百位部分,第二部分为十位部分,第三部分为个位部分。这三个部分由前到后依次执行,即发出定数目的脉冲,全部执行完后所发脉冲数相加即为输入命令所要求的。三段程序结构相同,现仅就百位部分进行详细说明,键盘所输入的回转角度百位数乘以100再乘以34就是定时器应溢出的次数,所以使用DINZ指令使定时程序段重复运行以上所述次数,便可以完成百位数部分脉冲个数要求,十位部分与个位部分与百位部分相同。
程序如下:
- MODEL_1: CLR P3.1
- MOV A, 1AH
- CJNE A, #00H, BAIWEI;百位数判0,如如果为零跳转十位数判0,否则百位循环
- AJMP SHIWEI_1
- BAIWEI: MOV 15H,#22H;百位循环,回转工作台旋转1度对应定时器溢出次数34=22H
- LOOP1_2: MOV 12H, #64H
- LOOP1_1: MOV R1, 1AH;将由键盘输入的百位度数给R1
- LOOP1_3: CPL P3.1 ;由P3.1输出CP脉冲
- CLR TF0
- MOV TH0, #0E7H
- MOV TL0, #00H
- SETB TR0
- LOOP1_4: JBC TF0, LOOP1_5;检测定时器0是否溢出,溢出则转L0OP1_5,否则继续检测
- AJMP LOOP1_4
- LOOP1_5: DJNZ R1, LOOP1_3
- DJNZ 12H,LOOP1_1
- DJNZ 15H,LOOP1_2
- SHIWEI_1: MOV A, 1BH ;十位循环
- CJNE A, #00H, SHIWEI
- AJMP GEWEI_1
- SHIWEI: MOV 15H,#22H
- LOOP2_2: MOV 13H, #0AH
- LOOP2_1: MOV R2, 1BH
- LOOP2_3: CPL P3.1
- CLR TF0
- MOV TH0, #0E7H
- MOV TL0, #00H
- SETB TR0
- LOOP2_4: JBC TF0, LOOP2_5
- AJMP LOOP2_4
- LOOP2_5: DJNZ R2, LOOP2_3
- DJNZ 13H, LOOP2_1
- DJNZ 15H, LOOP2_2
- GEWEI_1: MOV A,1CH ;个位循环
- CJNE A, #00H, GEWEI
- AJMP HERE
- GEWEI: MOV 15H, #22H
- LOOP3_2: MOV 14H, #01H
- LOOP3_1: MOV R3, 1CH
- LOOP3_3: CPL P3.1
- CLR TF0
- MOV TH0, #0E7H
- MOV TL0,#00H
- SETB TR0
- LOOP3_4: JBC TF0, LOOP3_5
- AJMP LOOP3_4
- LOOP3_5: DJNZ R3,LOOP3_3
- DJNZ 14H, LOOP3_1
- DJNZ 15H, LOOP3_2
- HERE: SJMP HERE
4)延时子程序
按前述要求,键盘防抖与显示程序所需,延时程序需要有10ms的延时,使
用12MHz振荡器,故一个机器周期为1us。
程序如下:
D_10ms: MOV11H#32H;1*1us
LOOP: MOV 10H,#63H;*50us
DJNZ 10H,$;2*99*50us,原地跳转
DJNZ 11H,LOOP;2*50us,(1+50+9900+100)us=10050us≈10ms
RET
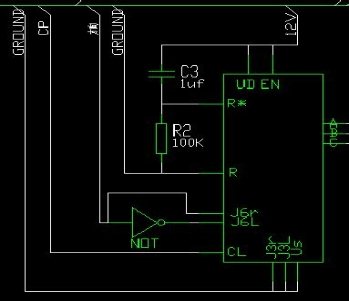
5)环形分配器电路
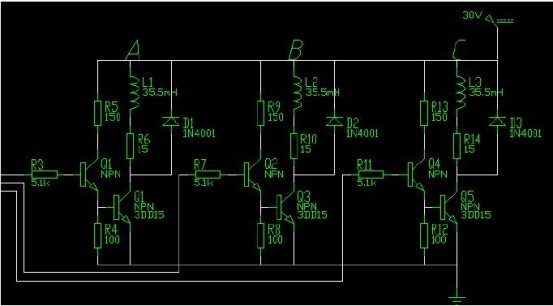
6)功率放大电路
采用单电压功率放大电路,如图所示,A、B、C分别为步进电机的三相,每相由一组放大器驱动。放大器输入端与环形脉冲分配器相连。在没有脉冲输入时,3DK4和3DD15功率晶体管均截止,绕组中无电流通过。电动机不转。当A相得电时,电动机转动一步。当脉冲依次加到到A、B、C三个输入端时,三组放大器分别驱动不同的绕组,使电动机一步一步转动。电路终于绕组并联的二极管VD起续流作用,记载功功放管截止时,使储存在绕组中的能量通过二极管形成续流回路泄放,从而保护功放管。与绕组W串联的电阻R为限流电阻,限制通过绕组的电流不致超过其额定值,以免电动机发热厉害被烧坏。R的阻值一般在5“2092范围内选取。
电路如下图:
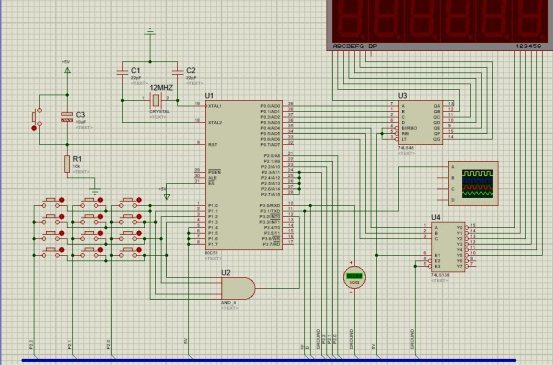
Protues是一款可以对各种电路进行仿真的软件,可以验证电路连线与程序的正确性,现将仿真步骤与结果向述于下。
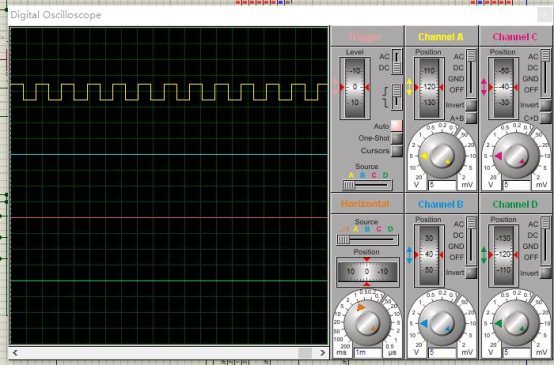
仿真方法:由前所述连接电路,因本软件没有环形分配器CH250,故仅对单片机发出的方向信号与脉冲信号进行检验是否满足要求,由前所述,为了满足工作台的回转要求,步进电机运行频率为625步/s,环形分配器每接到一个上升沿则走一拍,因而单片机的脉冲频率应为625HZ,即单片机发出的脉冲周期应为1/625=1.6ms,电压为5V。
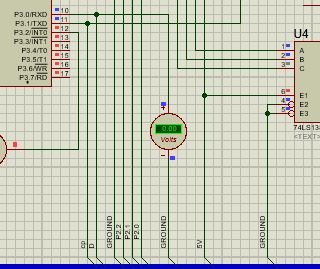
1、由前所述,连接仿真电路,从 DEVICES中PICK各种种元器件,并连接之,最后将示波器与P3.0和P3.1相连,电路图如下:
其中用电压表来检测方向电压是否正确,示波器来检测脉冲波形是否正确;单片机所需程序由Keil软件输入,并导出成为hex文件,由上图的单片机击导入,并设定 Clock Frequency为12MHz,点击仿真按钮开始仿真。
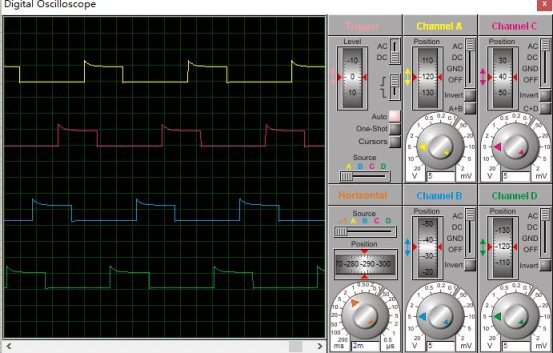
2、将指令“00000”输入(后三个零可以不用输入,因为是连续运转,输不输
入皆可以),按下“运行”键,指令表示正方向连续运转,运行结果如下图所示:
总结为期三周的机电一体化课程设计在这里终于改一段落了,由于自己的知识有限,这次的课程设计遇到了不少问题,很多地方也有欠缺,不过这个过程还是使我受益匪浅。通过这次的课程设计使我加深了对理论知识的理解,并且对于之前的实习及课程设计有了更深刻的认识
课程设计是我们在完成之前的教学计划所规定的全部课之后,综合运用所学过的全部理论知识与实践相结合的实践性数学环节。它培养我们进行综合分析和提高解决实际问题的能力,从而达到巩固,扩大,深化所学知识的目的,它培养我们调查研究熟悉有关技术政策,运用国家标准,规范,手册,图册等工具书,进行设计计算,数据处理,编写技术文件的独立工作能力。
通过我学到了很多,初步的让我认识到理论和实践相结合的重要。除了巩固了所学的理论知识外,还学到不少的新知识和新方法。通过本次的设计使我对CAXA操作更熟练,能够完整的画出单片机接线图图纸。
刚开始做这个设计的时候,我几乎是无从下手的.在同学的指导和自己不断的错误和摸索下找到了一定的方法. 不过在做这个设计的时候还是遇到了很多问题,如在控制设计的时候对接线图的设计处理不当,遗漏了很多解口问题等等。设计控制程序时,遗漏了延时程序,这些错误我用了很长的时长的时间才做好,幸好还是完成了这次设计,使自己对数控机床的工作台有了一定的认识,但我对它里面的很多机械部分还是不太清楚。因而,要学好它,必须掌握不少的其他领域学科的知识,因此还要更多的时间和努力。由于本次设计时间短和水平有限,做的不够精细,难免有点错误恳请各位读者批评指正。
同时感谢老师们对我的悉心指导!















 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩


