这是相关电磁组资料
仅供参考
 
本文主要创新点如下:
1.提出了基于三次多项式曲线拟合的位置解算算法。该算法采用三次多项式来拟合通电导线周围磁场强度变化曲线,从而解算出小车相对赛道的偏移距离。该算法在满足实时性与检测精度的前提下,对复杂赛道具有很强的适应性。
2.给出了基于赛道曲率的“阿克曼转向”控制算法。该算法通过位置偏差计算出赛道曲率,然后应用“阿克曼转向模型”计算出转角控制量。该转向控制算法能适应各种曲率的赛道,克服了已有方法在大半径赛道中的抖动现象。
(2)电机驱动系统
可逆 PWM 变换电路有多种形式,最常用的是桥式(亦称 H 型)变换器。它是由四个功率开关器件和四个续流二极管组成的电路,其特点是可以改变电机电枢上的电源电压的正负极,使得直流电机可以在四象限中运行。

主控器系统包括单片机及其外部电路、人机接口模块。竞赛所使用的单片机为竞赛组委会指定的飞思卡尔公司的 9S12XS128。它是以运算速度很快的 CPU12 内核为核心的单片机,经过锁相环后,时钟频率可达到88MHz,内部 Flash 高至 128KB,拥有 2 组各 8 路 10 位 A/D、16 路 I/O 口,有功能强大的 8 路 8 位 PWM 输出,以及 8 路 16 位增强型定时器(ECT)。该单片机功能强大,完全能够胜任小车的检测和控制功能。[3]
人机接口模块是为了方便单片机与调试者之间的交互而设计的,一般包括 LED 指示灯、拨码开关、键盘、液晶显示屏、蜂鸣器、无线串口模块和 SD 卡等。LED 可以显示简单的工作状态,蜂鸣器可以用于告警和指示,拨码开关可以用于简单的模式设置,液晶显示屏与键盘联合使用可以进行实时调试,无线模块用于少量数据 的收发,SD 卡可用于大量运行数据的存储。
(4)传感器系统
传感器系统一般包括用于检测交变磁场的电磁传感器模块、起始线检测模块、用于检测小车速度的脉冲编码器模块、检测小车加速度的加速度模块和检测小车倾斜角度的角度传感器或陀螺仪。
(a) 电磁传感器模块
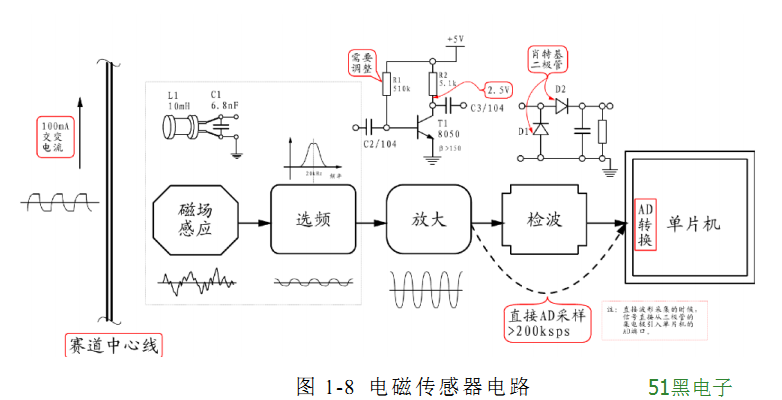
电磁组的传感器用于磁定位,根据诱导信号的产生方式不同分为信号电缆、磁带、道路磁钉及磁钉与磁带混合定位等。这次比赛所用的就是通有 20kHz、100mA 交流电的导线。传感器的种类有很多:磁通门传感器、霍尔传感器、磁阻传感器等。
通过理论计算,100mA 交流电的导线有效距离内的磁场强度为 10-4
-10-2
Gs, 因此可供选择的传感器有电磁感应线圈、霍尔效应电磁传感器等。 传感器电路中的放大电路通常有两种方案,一种是三极管放大,一种是采用运放放大。两种方案各有优缺点。
使用运放的放大电路具有增益可调、放大线性度好、输出纹波小等优点。但是运放一般都需要正负供电电源,而负电源较难设计;运放的输出电压范围要比输入电压低,从而限制了信号输入范围;且工作参数满足我们需求的运放价格都比较昂贵。
使用三极管放大电路具有电路简单、开关速度高、能很好的放大交流信号等优点。但是三极管放大静态工作点难调、放大倍数不高、容易出现各种失真等现象。
在上届比赛中,各参赛队基本都使用了以电磁线圈为测量元件、以三极管为放大元件和两倍压半波整流电路构成传感器电路。

(b) 起始线检测模块
起始线检测传感器用于检测磁场强度为 3000Gs-5000Gs 的永久磁铁,常用的传感器为霍尔元件或磁敏开关器件(干簧管)。
脉冲编码器又称码盘,是一种回转式数字测量元件,通常装在被检测轴上,随被测轴一起转动,可将被测轴的角位移转换为增量脉冲形式或绝对式的代码形式。根据 内部结构和检测方式码盘可分为接触式、光电式和电磁式 3 种。其中,光电码盘在数控机床上应用较多,而由霍尔效应构成的电磁码盘则可用作速度检测元件。另外,它还可分为绝对式和增量式两种。
目前被各参赛队广泛使用的脉冲编码器为欧姆龙公司的光电编码器或远征公司的光电编码器。
(d) 加速度传感器模块及倾角传感器模块
为了获取小车在运动中横向、纵向加速度及车辆倾斜角,对小车的运动姿态进行更加有效地控制,就必须要获得小车在运动过程中的三个方向的加速度及倾斜角。
目前各参赛队广泛使用飞思卡尔公司的 MMA7260 模拟加速度传感器或 MMA7450 数字加速度传感器来测量加速度或倾角。有的队还使用高性能的陀螺仪来测量小车经过坡道时的倾角。
(5)车体系统
车体系统包括舵机安装与转向机构设计,主销后倾角、主销内倾角、前轮外倾角、前轮前束优化调整,车体重心配置,差速器优化等方面。 主销后倾角是指主销的轴线相对于车轮的中心线向后倾斜的角度。前轮重心在主销的轴线上由于主销向后倾斜使前轮的重心不在车轮与地面的接触点上,于是产生了 离心力,主销后倾形成的离心力,可以保证汽车直线行驶的稳定性还可以帮助车轮自动回正。主销后倾角延长线离地面实际接触越远,车速越高,离心力就越大。在 中高速行驶中保持汽车直线行驶的稳定性,适当的加大主销后倾角可以帮助转向轮自动回正,可有效扼制转向器的摆振,可使转向便轻,单独适量调一侧主销后倾角 可修理行驶跑偏。
主销内倾角是指主销的轴线相对于车轮的中心线向内倾斜的角度。由于主销轴线向内倾斜,所以使前轴荷更接近前轮中心线。主销内倾轴线延长线在没超过前轮中心线的前提下,离前轮中心线越近,转向角越大,转向轮抬起的越高,车轮的回正力矩就越大。
转向轮上端略向外倾斜叫前轮外倾角。它的作用是增大车轮工作的安全性。汽车在空载时如车轮垂直于路面,承载后由于悬架的变形会出现车
轮内倾,使前轮轴荷轮毂外端转移,由于外端轴承明显小于内端轴承,于是就增大了车轮工作的不安全性。为了增大车轮工作的安全性,大部分后
轮驱动汽车,前轮都留有一定的外倾角,承载后车轮正好垂直于路面。 前轮前束为了抵消前轮外倾点来转向轮向两侧滚开的趋势,最大限度地减少车轮行驶中的横向滑移率。它可以修正前轮外倾带来的不良影响。
1.2.2 软件系统
软件系统主要包括横向控制算法及纵向控制算法。横向控制算法包括位置解算算法和舵机控制算法,纵向控制算法包括速度规划算法和电机控制算法。
(1)位置解算算法
目前被各队广泛采用的位置解算算法主要有两种,一是基于无限长导线电磁感应公式,解算出偏离赛道信息,简称公式法;二是通过对称传感器的差值在一定范围内近似线性化来近似得出偏离赛道信息,简称差值斜率法。
(2)速度规划算法
速度规划算法没有固定的形式,有的小车根本没有速度规划,只是单纯地建立了位置偏差与速度对应关系,通过位置偏差得出期望运行速度。从上年的情况来看,取 得好成绩的队伍都是使用了比较有效的速度规划算法。在通常情况下,速度规划算法应包括入弯减速算法、出弯加速算法、坡道低速算法等。
(3)控制算法
目前最常用的控制算法是 PID 控制算法。PID 控制是按偏差的比例、积分和微分进行控制的一种控制规律。它具有原理简单,易于实现,参数整定方便,结构改变灵活,适用性强等优点。由于赛道情况复杂,干扰较多,
突变较多,加入微分控制会对电机造成很大干扰,因此电机控制算法使用PI 控制算法;由于舵机是一个大延迟系统,加入积分控制会使系统不稳定,而且小车运动过程中不需要考虑之前走过的路径,因此舵机控制算法使用PD 控制算法。
4.1.1 调试软件实时调试
在软件上,可以使用 Codewarrior4.7 的仿真功能,通过 BDM 仿真器观察程序中参数的变化。本调试方法可以用来测试小车算法,观察小车错误,实时性强,调试结果清晰,并且可以设置断点,进入程序内部观察程序走向。但 该调试方式受单片机内存的限制,不能存储大量的数据,因此不能用作整车的数据分析。
4.1.2 双机通信实时调试
为了方便的获小车的各种信息 , 专门购 买了用于航模的
APC200A-43 多通道微功率嵌入式无线数传模块作为无线传输工具。
APC200A-43 模块是高度集成半双工微功率无线数据传输模块,其嵌入高速单片机和高性能射频芯片。APC200A-43 模块提供了多个频道的选择,能够透明传输任何大小的数据,而用户无须编写复杂的设置与传输程序,并提供 UART/TTL,RS485 以及 RS232 三种接口。同时小体积,宽电压运行,较远传输距离,丰富便捷的软件编程设置功能,使 APC200A-43 模块能够应用与非常广泛的领域。将一个 APC200A-43 作为单片机终端,另一个经过 USB 转接口作为 PC 机终端。通过单片机的 SCI 模块,向上位机发送数据。
4.1.3 MATLAB 或 EXCEL 数据分析
MATLAB 可以用来对算法进行仿真,在前期用来验证算法的可行性。 通过无线串口获得小车的运行状况的数据后,可以通过 EXCEL 将数据处理,绘制数据图形,给人以直观的印象,便于分析算法的优劣。其具体使用见 4.2 节。
4.2 调试流程及调试结果
4.2.1 位置解算算法仿真分析
使用 MATLAB 对公式 2-11 进行仿真,并取在传感器对应位置的值来做位置解算算法的输入,并通过 MATLAB 拟合分析,可以得到: 该车的实际偏移位置为 0cm,算法计算的偏移位置为-0.1cm,误差为0.1cm。
综上所述,该算法的精度在 5mm 以上,并且偏移位置越小,误差越小,满足了小车的控制要求。
4.2.2 电机 PI 参数测试
通过使用无线串口将单片机运动中的实时速度发送至计算机,然后通过 EXCEL 绘图,便可得出在不同的控制参数下小车的速度趋势曲线,便可从曲线中得出超调量、调节时间等动态参数。以下为期望速度为 200 时不同 PI 参数时的速度曲线。
由上述分析可得,增大 KI,速度的调节时间减少,超调量增加。通过多次数据比对,我们最后取得的电机 PI 参数为 KP=12,KI=0.7。
4.3 整车联调测试及结果

测试赛道如图 4-10 所示,该赛道具有元素多、难度大等特点。为了便于分析,将本赛道分解为几个部分,分别是小 S 部分、大 S 部分、太极弯部分、直道入急弯部分、坡道部分、大回环部分。下面针对各部分进行赛道分析及展示调试结果。为了便于描述,下文中使用了弱化转向、中等转向、 强化转向等术语,其含义是对算法得出的控制量乘以一定的系数。弱化转向乘以小于 1 的系数,具体大小与控制量相关;中等转向不改变控制输出量;强化转向乘以大于 1 的系数,具体大小与控制量相关。
1. 小 S 部分
小 S 道的偏移量相对较小,但是赛道曲率中心在不断改变,需要频繁换向,这对于前瞻不大、信息量不足的电磁小车来说,如果没有一个很好的控制方案,小车在该赛道 中就会剧烈抖动,速度快的话就会跑出赛道。 本文提出的基于赛道曲率的“阿克曼转向”控制方案与原始的基于位置偏差的控制方案不同,它可以实时预测到赛道的曲率及曲率中心的变化。当赛道的曲率较大且 曲率中心频繁变换时,我们便可以知道小车正处于小S 道。此时我们便使用转向弱化、中速前进的控制方案。小车在小 S 道的运动轨迹示意图如图 4-11 所示。

2. 大 S 部分
大 S 的偏移量相对较大,但是赛道的曲率中心不频繁改变。在大 S 道中的转向控制较为简单,但是速度控制是一个难点。如何在大 S 道中实现弯道切换时减速,在弯道中加速,是提高竞赛成绩的一个关键点。 本文提出的基于赛道曲率的控制方案可以很好得解决上述问题。当赛道曲率不断改变、曲率中心只出现一次改变时,我们就可以认为是进入了弯道切换状态,此时便 采用加强转向、低速前进的控制方案;当赛道曲率较大,曲率中心不变时,我们就可以认为是进入弯道状态,此时采用中等转向、中高速前进的控制方案。小车在大 S 道中的运动轨迹示意图如图 4-12所示。
3. 太极弯部分
太极弯部分的赛道间距较小,容易发生串扰现象;太极弯部分对小车的转向性能要求很高,给予的调整空间较小。 本文提出的基于三次多项式拟合的位置解算算法鲁棒性很高,可以克服各种干扰的影响,显然临近导线段对传感器的干扰也可以大致消除。事实上,我们可以把太极 弯当做一个对转向性能要求更高的大 S 道。因此,我们采用了强化转向,低速前进的控制方案。小车在太极弯部分的运动轨迹示意图如图 4-13 所示。
4. 直道入急弯部分
在直道部分时,赛道曲率几乎为 0。如果此时控制参数过大,容易产生频繁抖动情况。若在直道时给予很高速度,那么在直道入急弯时便会因为转向延迟而跑出赛道。
本文提出的基于赛道曲率的“阿克曼转向”控制方案可以很好得解决这个问题。当赛道曲率小于一定值的时候,我们便采取弱化转向、高速前进的控制方案。当赛道 曲率小于一定值持续了一定时间,我们便可以知道目前的赛道是直道,从而采取最高速前进方案。当检测到赛道曲率有大变化时,我们便可知道前方有急弯,此时便 采取强化转向,紧急刹车的控制方案。小车在直道入急弯部分的运行轨迹示意图如图 4-14 所示。
5. 坡道部分
比赛中所使用坡道为前后各 15° 的梯形坡,顶部为直道。爬坡时,传感器的高度会不断发生变化,从而导致传感器的值也在不断发生变化,这对基于公式的位置算法与对称差值的位置算法带来了很 大的误差。本文提出的基于三次多项式拟合的位置解算算法的输出只由当前的传感器值决定,因此它可以很好得解决小车在坡道时的位置检测问题。
由于小车在上下坡时的抖动很大,考虑到小车运动的稳定性,故小车在坡道上必须中低速前进。
6. 大回环部分
大回环的曲率一般较小,且赛道较长,如何在大回环提速,是提高小车速度的关键点之一。本文提出的基于赛道曲率的“阿克曼转向”控制方案可以检测出大回环的 曲率,并由此曲率计算出阿克曼转角,控制舵机转向,实现在转角基本不变时高速前进。因此,在大回环赛道中,采取了中等转向、高速前进的控制方案。小车在大 回环部分的运动轨迹示意图如图 4-15所示。
经过优化控制方案和改进算法,目前小车在本测试赛道上已经可以达到稳定速度 2.6m/s,峰值速度 2.8m/s 的水平。
完整的pdf格式文档51黑下载地址:
 飞思卡尔技术报告.pdf
(3.04 MB, 下载次数: 538)
飞思卡尔技术报告.pdf
(3.04 MB, 下载次数: 538)
|

 [复制链接]
[复制链接]






