121385936 发表于 2021-5-28 08:41 PID=Uk+KP*【E(k)-E(k-1)】+KI*E(k)+KD*【E(k)-2E(k-1)+E(k-2)】 公式没错哦 |
| duk=Kp*(e-e1)+Ki*e+Kd*(e-2*e1+e2); //+Kd*(e-2e1+e2)这公式错了吧 |
|
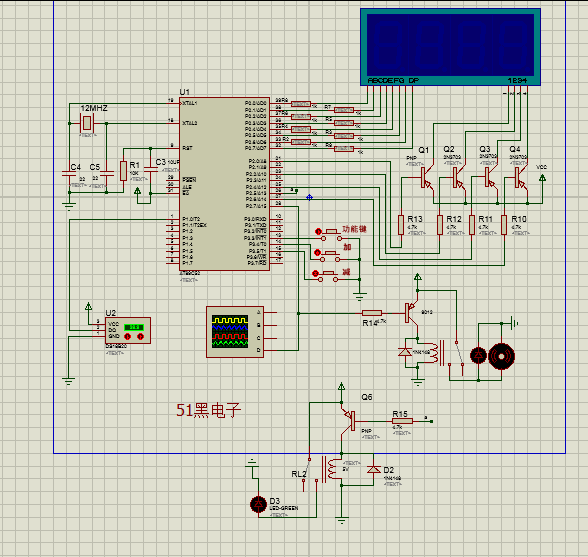
您好,我想请问一下,示波器跟继电器是怎么调配的 |
| 楼主我想知道P2^7这个管脚接的器件是什么 |
| else Disp_temp=Set_temp;这句代码不全281行 |
| 做成实物,数码管闪烁厉害,调整温度只能调到9.9度,望楼主审查后再发出来 |
| 楼主太优秀了 |
| 效果不太理想,数据误差太大 |
| 好东西,值得学习!!!!!!!!!! |
1151541640 发表于 2019-12-17 10:00 确实挺好用 |
| 感谢,仿真图有高清版吗,大神 |
| 挺全面呀,发现新大陆 |
|
挺好用的 非常完美 |
| 感谢分享。非常好用 |
| 感谢分享,学习一下。不知道能不能用 |
| 感谢,很有用 学习了 |
| 感谢分享,学习一下。 |
 收藏
收藏 顶
顶 踩
踩

