|
ЙијЖТ»ёцЦұБчЛЕ·юөз»ъөз»ъҝШЦЖПөНіЈ¬ҝШЦЖ№ҰДЬТӘЗуКөПЦөз»ъөДЖф¶ҜЎўНЈЦ№ҝШЦЖЎўХэЧӘЎў·ҙЧӘЎўјУЛЩЎўјхЛЩ№ІБщЦЦ№ҰДЬЈ¬ОӘБЛДЬКөПЦИЛ»ъҪ»»ҘЈ¬РиТӘУГөҪ°ҙјьәНКэВл№ЬЎЈ ҫЯМеТӘЗуИзПВЈәK0ОӘЖф¶Ҝ/НЈЦ№ҝШЦЖЎўK1ХэЧӘЎўK2·ҙЧӘЈ»K3јУЛЩЈ¬K4јхЛЩЈ¬УГ3ёц·ў№в¶юј«№ЬПФКҫЧҙМ¬ЈәХэЧӘКұәмөЖББЈ¬·ҙЧӘКұ»ЖөЖББЈ¬І»ЧӘКұВМөЖББЎЈІўАыУГ4О»LEDКэВл№ЬПФКҫөз»ъЧӘЛЩЎЈ ТӘЗу·ЦОцЈә °ҙјьK1УГАҙҝШЦЖөз»ъ·ҙЧӘЈ¬Ифөз»ъХэФЪНЈЦ№»тХэЧӘЧҙМ¬Ј¬өұ°ҙПВk1КұЈ¬өз»ъҝӘКј·ҙЧӘЈ»Ифөз»ъҙҰУЪ·ҙЧӘЧҙМ¬Ј¬өз»ъІ»ПмУҰ°ҙјьГьБоЎЈ °ҙјьK2УГАҙҝШЦЖөз»ъХэЧӘЈ¬Ифөз»ъХэФЪНЈЦ№»т·ҙЧӘЧҙМ¬Ј¬өұ°ҙПВk2КұЈ¬өз»ъҝӘКјХэЧӘЈ»Ифөз»ъҙҰУЪХэЧӘЧҙМ¬Ј¬өз»ъІ»ПмУҰ°ҙјьГьБоЎЈ °ҙјьK3УГАҙҝШЦЖөз»ъјУЛЩЈ¬өұөз»ъҙҰУЪФЛРРЧҙМ¬КұЈ¬Из№ыөз»ъЙРОҙҙпөҪЧоҙуЧӘЛЩЈ¬өұ°ҙПВ°ҙјьK3КұЈ¬өз»ъ»бјУЛЩЈ¬Гҝ°ҙТ»ҙОЈ¬өз»ъјУЛЩТ»ёцҪЪЕДЈ¬ИфРиТӘТ»ЦұјУЛЩЈ¬ФтРиТӘ¶аҙО°ҙПВ°ҙјьK3Ј¬өұөз»ъөҪҙпЧоҙуЛЩ¶ИКұЈ¬өз»ъҪ«ұЈіЦФЪЧоҙуЛЩ¶ИФЛРРЈ¬І»ФЩПмУҰ°ҙјьГьБоЎЈ °ҙјьK4УГАҙҝШЦЖөз»ъјхЛЩЈ¬өұөз»ъҙҰУЪФЛРРЧҙМ¬КұЈ¬Из№ыөз»ъЙРОҙҙпөҪЧоРЎЧӘЛЩЈ¬јҙНЈЦ№ЧҙМ¬Ј¬өұ°ҙПВ°ҙјьK4КұЈ¬өз»ъ»бјхЛЩЈ¬Гҝ°ҙТ»ҙОЈ¬өз»ъјхЛЩТ»ёцҪЪЕДЈ¬ИфРиТӘТ»ЦұјхЛЩЈ¬ФтРиТӘ¶аҙО°ҙПВ°ҙјьK4Ј¬өұөз»ъөҪҙпЧоРЎЛЩ¶ИКұЈ¬јҙөз»ъҙҰУЪНЈЦ№ЧҙМ¬Ј¬өз»ъҪ«ұЈіЦНЈЦ№Ј¬І»ФЩПмУҰ°ҙјьГьБоЎЈ ОӘБЛЦӘөАөз»ъКЗ·с°ҙҝШЦЖТӘЗу№ӨЧчЈ¬РиТӘЦӘөАөз»ъөДЧӘЛЩЈ¬ХвАпУГөҪБЛ4О»КэВл№ЬАҙПФКҫЈ¬ЧоёЯО»ПФКҫЧӘ¶Ҝ·ҪПтЈ¬ХэЧӘПФКҫЎ°0ЎұЈ¬·ҙЧӘПФКҫЎ°-ЎұЎЈәу3О»УГАҙПФКҫЧӘЛЩөДКэЦөҙуРЎЎЈ ҙЛНвЈ¬ЙиЦГИэёц·ў№в¶юј«№ЬЈ¬АҙПФКҫөз»ъөДФЛРРЧҙМ¬ЎЈөұөз»ъНЈЦ№КұЈ¬ВМөЖББЈ¬өұөз»ъХэЧӘКұЈ¬әмөЖББЈ¬өұөз»ъ·ҙЧӘКұЈ¬»ЖөЖББЎЈ 2. ҝШЦЖ·Ҫ°ёЙијЖТтОӘЦұБчөз»ъөД№ӨЧчөзС№әНөзБчУлҝШЦЖөзВ·өДөзС№әНөзБчІ»ЖҘЕдЈ¬ЛщТФРиТӘЙијЖҪУҝЪөзВ·Ј¬УГАҙ°СҝШЦЖөзВ·өДЦёБоЧӘ»ҜОӘөз»ъөД№ӨЧчРЕәЕЈ¬ХвЦЦҪУҝЪөзВ·іЖОӘЦұБчөз»ъөДЗэ¶ҜөзВ·ЎЈЦұБчөз»ъөДЗэ¶ҜөзВ·УР¶аЦЦІ»Н¬өДЙијЖ·Ҫ°ёЈ¬ХвАпЧЕЦШҪйЙЬБЛУГ·ЦБўФӘјю№№іЙөДЗэ¶ҜөзВ·әНУГјҜіЙРҫЖ¬№№іЙөДЗэ¶ҜөзВ·ЎЈ 2.1УГ·ЦБўФӘјю№№іЙЦұБчөз»ъөДЗэ¶ҜөзВ· АыУГҫ§Ме№ЬЈ¬өзЧиөИ·ЦБўФӘјюЈ¬АҙЧйіЙЦұБчөз»ъөДИ«ЗЕЗэ¶ҜөзВ·ЎЈТтОӘөз»ъөД№ӨЧчөзБчҪПҙ󣬶шТ»ёцИэј«№ЬөДөзБч·ЕҙуДЬБҰУРПЮЈ¬ЛщТФІЙУГҙпБЦ¶ЩЧйіЙИ«ЗЕЈЁHЗЕЈ©Зэ¶ҜөзВ·ҝШЦЖөз»ъЈ¬ТФВъЧгөз»ъ№ӨЧчөДРиТӘЎЈИзНј1ЛщКҫЎЈНјЦРөДQ1~Q4КЗ№ҰВКИэј«№ЬЈ¬ЖдЦРQ1әНQ2ЧйіЙТ»ёцЗЕұЫЈ¬ЖдЦРQ3әНQ4ЧйіЙТ»ёцЗЕұЫЎЈГҝёц№ҰВКИэј«№ЬЕФұЯУРТ»ёцРшБч¶юј«№ЬЎЈөұQ1әНQ4ҙтҝӘКұЈ¬ЦұБчөз»ъөДҝШЦЖөзБчҙУAБчПтBЈ¬ҙЛКұЦұБчөз»ъХэЧӘЈ»өұQ2әНQ3ҙтҝӘКұЈ¬ЦұБчөз»ъөДҝШЦЖөзБчҙУBБчПтAЈ¬ҙЛКұЦұБчөз»ъ·ҙЧӘЎЈХвСщЈ¬НЁ№эQ1~Q4өДҝШЦЖҫНҝЙТФҝШЦЖЦұБчөз»ъөДЧӘПтБЛЎЈ 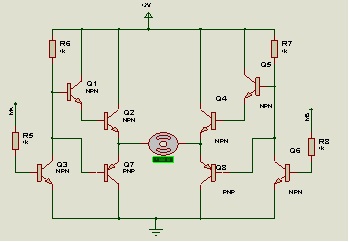
Нј1 ЦұБчөз»ъИ«ЗЕҝШЦЖФӯАнНј 2.2УГөз»ъЗэ¶ҜРҫЖ¬Аҙ№№іЙЦұБчөз»ъөДЗэ¶ҜөзВ· ХвАпЛщУГөДЗэ¶ҜРҫЖ¬КЗL298Ј¬L298ЖрөҪ·ҪҙуөзБчөДЧчУГЎЈL298УР4В·КдИлЈ¬4В·КдіцЈ¬2ёцК№ДЬ¶ЛЎЈУГL298№№іЙөДЗэ¶ҜөзВ·ИзНј2ЛщКҫЎЈ Жд№ӨЧчФӯАнОӘЈәL298РҫЖ¬ЦРЈ¬IN1¶ФУҰOU1,IN2¶ФУҰOUT2Ј¬IN3¶ФУҰOU3,IN4¶ФУҰOUT4Ј¬К№ДЬ¶ЛENA¶ФУҰIN1әНIN2Ј¬К№ДЬ¶ЛENB¶ФУҰIN3әНIN4ЎЈФЪК№ДЬ¶ЛОӘёЯөзЖҪөДЧҙМ¬ПВЈ¬өұIN1КдИлёЯөзЖҪIN2КдИлөНөзЖҪКұЈ¬өз»ъХэЧӘЈ¬өұIN1КдИлөНөзЖҪIN2КдИлёЯөзЖҪКұЈ¬өз»ъ·ҙЧӘЈ¬өұIN1әНIN2КдИлөзЖҪПаөИКұЈ¬өз»ъІ»ЧӘЎЈИз№ыК№ДЬ¶ЛОӘөНөзЖҪЈ¬ДЗГҙөз»ъІ»КЬҝШЦЖЈ¬¶шҙҰУЪНЈЦ№ЧҙМ¬ЎЈ 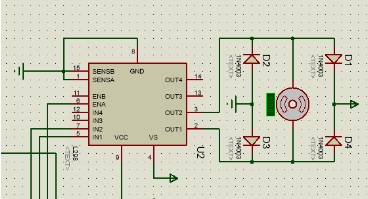
Нј2ЦұБчөз»ъЗэ¶ҜөзВ·Нј L298өД№ӨЧчөзС№·¶О§ФЪ7V~50VЦ®јдЈ¬КдіцөзБчҝЙҙп2AЈ¬ДЬ№»ВъЧгЦұБчөз»ъөДҝШЦЖРиТӘЎЈ 2.3.·Ҫ°ёСЎФс ТФЙПЛщёшөДБҪЦЦЦұБчөз»ъөДЗэ¶Ҝ·Ҫ°ё¶јДЬВъЧгТӘЗуЈ¬ПЦФЪАҙ¶ФЛьГЗҪшРР·ЦОцұИҪПЈ¬СЎіцәПККөД·Ҫ°ёЎЈ УГ·ЦБўФӘјю№№іЙөДЦұБчөз»ъЗэ¶ҜөзВ·Ј¬ЖдУЕөгКЗЈәөзВ·УЙ·ЦБўФӘјюЧйіЙЈ¬НЁ№э·ЦОцөзВ·Ј¬ДЬЦұ№ЫөДБЛҪвЗэ¶ҜөзВ·өД№ӨЧчФӯАнЈ¬¶ФУЪАнВЫС§П°КЗ·ЗіЈУР°пЦъөДЎЈЖдИұөгКЗЈәөзВ·№эУЪёҙФУЈ¬ФЪЦЖЧчКөОпКұИЭТЧіцҙнЈ¬БнТ»·ҪГжЈ¬·ЦБўФӘјю№э¶аЈ¬ЖдҝЙҝҝРФәЬДСұЈЦӨЎЈ УГјҜіЙРҫЖ¬№№іЙөДЦұБчөз»ъЗэ¶ҜөзВ·Ј¬ЖдУЕөгКЗЈ¬өзВ·јтөҘЈ¬ФӘјюјхЙЩЈ¬өзВ·өДҝЙҝҝРФёЯЈ¬ЦЖЧчКөОпКұПа¶ФҪПИЭТЧЎЈЖдИұөгКЗЈ¬¶ФУЪіхС§ХЯәЬДСЦӘөАЖЪДЪөД№ӨЧчФӯАнЈ¬Ц»ДЬјтөҘөДУГЎЈ НЁ№эЙПГжөД·ЦОцЈ¬ОТҫц¶ЁСЎУГјҜіЙРҫЖ¬L298Аҙ№№іЙЦұБчөз»ъөДЗэ¶ҜөзВ·Ј¬ХвСщКөПЦЖрАҙҪПОӘИЭТЧЎЈ 2.4.ЧЬМе·Ҫ°ёЙијЖ ҝШЦЖПөНіөДәЛРДҝШЦЖРҫЖ¬КЗAT89C51өҘЖ¬»ъЈ¬өҘЖ¬»ъЧчОӘХыёцПөНіөДҙуДФЈ¬РӯөчёчёцІҝјюөД№ӨЧчЎЈКЧПИЈ¬өұ°ҙјь·ўіцөДҝШЦЖЦёБоКұЈ¬өҘЖ¬»ъАыУГНвІҝЦР¶ПІЙјҜҝШЦЖЦёБоЈ¬Іў¶ФҝШЦЖЦёБоҪшРРҙҰАнЈ¬Ц®әуКдіцРЕәЕҝШЦЖЦұБчөз»ъөДЗэ¶ҜөзВ·ЎЈУлҙЛН¬КұЈ¬өҘЖ¬»ъТӘјЖЛгЦұБчөз»ъөДЧӘЛЩЈ¬ІўЗТТӘ°Сөз»ъөДЧӘЛЩФЪКэВл№ЬЙППФКҫіцАҙЎЈЦұБчөз»ъөДөчЛЩКЗНЁ№эөҘЖ¬»ъҝШЦЖКдіцPWMөДХјҝХұИКөПЦөДЈ¬ОӘБЛМбёЯөҘЖ¬»ъөД№ӨЧчР§ВКЈ¬¶Ф°ҙјьөДЙЁГиІЙУГЦР¶П·ҪКҪЎЈЖдФӯАнҝтНјИзНј3Јә
Нј3ҝШЦЖПөНіФӯАнҝтНј 3.УІјюөзВ·ЙијЖ3.1өҘЖ¬»ъЧоРЎ№ӨЧчПөНі өҘЖ¬»ъЧоРЎ№ӨЧчПөНіЦёөҘЖ¬»ъДЬХэіЈ№ӨЧчөДЧоЙЩЕдЦГЈ¬°ьАЁөзФҙЎўКұЦУөзВ·ЎўёҙО»өзВ·әНТ»ҝй51өҘЖ¬»ъЎЈ ЈЁ1Ј©89C51 AT89C51КЗТ»ЦЦҙш4KЧЦҪЪFLASHЧЦҪЪҙжҙўЖчЈЁFPEROMЎӘFlash Programmable and Erasable Read Only MemoryЈ©өДөНөзС№ЎўёЯРФДЬCMOS 8О»ОўҙҰАнЖчЈ¬ЛЧіЖөҘЖ¬»ъЎЈИзНј4ЛщКҫЎЈ 
Нј4 AT89C51 ЈЁ2Ј©КұЦУөзВ· MCS-51өҘЖ¬»ъөДКұЦУУРБҪЦЦ№ӨЧч·ҪКҪЈәТ»ЦЦКЗДЪІҝХсөҙ·ҪКҪЈ¬ЛьКЗАыУГөҘЖ¬»ъДЪІҝөДХсөҙөзВ·Ј¬ІъЙъКұЦУРЕәЕЈ¬ХвЦЦ·ҪКҪөҘЖ¬»ъөДКұЦУТэҪЕЙПҪУКҜУўҫ§МеәНХсөҙөзИЭЈ»БнНвТ»ЦЦКЗНвІҝХсөҙ·ҪКҪЈ¬ЛьКЗ°СНвІҝТСУРөДКұЦУТэИлөҘЖ¬»ъЎЈПВГжАҙҪйЙЬҪПОӘіЈУГөДДЪІҝХсөҙ·ҪКҪЈә ИзНј5Ј¬өҘЖ¬»ъДЪІҝУРТ»ёцУГУЪ№№іЙХсөҙЖчөДёЯФцТж·ҙПа·ЕҙуЖчЈ¬ЛьөДКдИл¶ЛОӘXTAL1ТэҪЕЈ¬Кдіц¶ЛОӘXTAL2ТэҪЕЈ¬·ЦұрКЗ8051өҘЖ¬»ъөД19ҪЕәН18ҪЕЈ¬ЖдЖөВК·¶О§ОӘfOSC=0~12MHZЎЈ 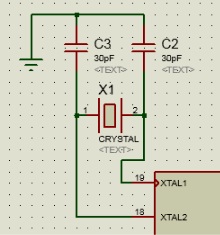
Нј5 ДЪІҝХсөҙ·ҪКҪКұЦУөзВ·Нј ЈЁ3Ј©ёҙО»өзВ· НщөҘЖ¬»ъөДёҙО»ТэҪЕЙПКдИл24ёцКұЦУЦЬЖЪТФЙПөДёЯөзЖҪЈ¬јҙЦҙРРёҙО»ІЩЧчЎЈФЪҙЛҙОҝОЙиЦРОТУГөДКЗ°ҙјьёҙО»Ј¬өзВ·ИзНј6ЛщКҫЈ¬ПөНіФЪФЛРРКұЈ¬°ҙПВёҙО»°ҙјьЈ¬ҫНДЬФЪRSTТэҪЕІъЙъТ»¶ОКұјдөДёЯөзЖҪЈ¬К№ПөНіёҙО»ЎЈҙЛҙҰЈ¬ИЎ12MHZөДҫ§ХсЈ¬өзИЭИЎ30pFЎЈ 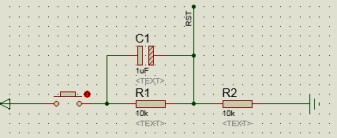
Нј6 °ҙјьёҙО»өзВ· 3.2КэВл№ЬПФКҫөзВ· LEDКэВл№ЬКЗУЙaЎўbЎўcЎўdЎўeЎўfЎўgЎўhХв8¶О·ў№в¶юј«№ЬЧйіЙөДЎ°8ЎұЧЦРОПФКҫЖчјюЎЈLEDКэВл№Ь·ЦОӘ№ІСфј«әН№ІТхј«БҪЦЦЈ¬ИзНј7ЛщКҫЈ¬Из№ыГҝ¶ОөДСфј«ҪУФЪТ»ЖрФтОӘ№ІСфј«LEDЈ¬Из№ыГҝ¶ОөДТхј«ҪУФЪТ»ЖрФтОӘ№ІТхј«LEDЎЈҙЛҙОҝОЙиЦРЈ¬ОТЛщУГөДКэВл№ЬОӘ№ІТхј«өДЎЈ 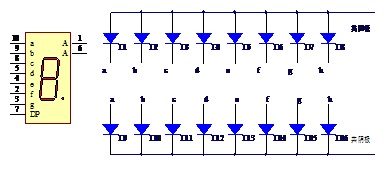
Нј7 LEDКэВл№Ь ХвАпУГөҪБЛ4О»КэВл№ЬЈ¬ИзНј8ЛщКҫЈ¬¶ОСЎ¶ЛҪУөҘЖ¬»ъөДP0ҝЪЈ¬ТтОӘP0ҝЪДЪІҝГ»УРЙПАӯөзЧиЈ¬ОӘёЯЧиМ¬Ј¬І»ДЬХэіЈөДКдіцёЯ/өНөзЖҪЈ¬ЛщТФХвАпРиТӘЙПАӯөзЧиЎЈОӘБЛөзВ·өДјт»ҜЈ¬ХвАпК№УГБЛЕЕЧиЎЈКэВл№ЬөДО»СЎ¶ЛҪУөҘЖ¬»ъөДP1.0~P1.3Ј¬өұКдіцөНөзЖҪКұЈ¬ұнКҫёГО»КэВл№Ьұ»СЎЦРЎЈ 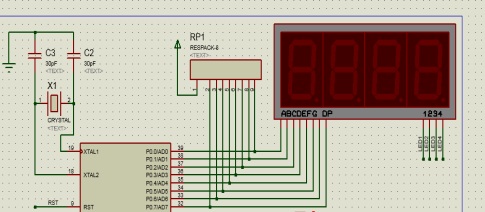
Нј8КэВл№ЬөзВ· 3.3ЦұБчөз»ъЗэ¶ҜөзВ· L298КЗТ»ҝоёЯөзС№ЎўёЯөзБчРНөДИ«ЗЕЗэ¶ҜөзВ·Ј¬КдИлОӘTTLөзЖҪЈ¬УГАҙЗэ¶ҜИзјМөзЖчЎўЦұБчөз»ъ»тІҪҪшөз»ъөИёРРФёәФШЎЈБҪёц¶АБўөДК№ДЬ¶ЛЈ¬ҝЙТФ¶АБўөДҝШЦЖБҪЧйЛДёцКдИлЎЈ ЦұБчөз»ъөДЗэ¶ҜөзВ·УЙL298№№іЙЈ¬51өҘЖ¬»ъНЁ№эP1.5~P1.7ҝЪҝШЦЖL298өДК№ДЬ¶ЛҝЪәНКдИл¶ЛҝЪЈ¬¶шЗэ¶ҜРҫЖ¬ФтКдіцұ»·ЕҙуөДҝШЦЖРЕәЕЈ¬УГТФҝШЦЖөз»ъФЛРРЎЈЗэ¶ҜөзВ·ИзНј9ЛщКҫЈ¬НјЦРЛщјУ4ёц¶юј«№ЬКЗЖрөҪұЈ»ӨЧчУГЎЈ 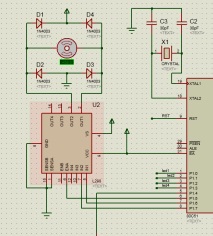
Нј9ЦұБчөз»ъЗэ¶ҜөзВ· 3.4°ҙјьҝШЦЖөзВ· өҘЖ¬»ъјмІв°ҙјьөДФӯАнКЗЈәөҘЖ¬»ъөДI/OҝЪјИҝЙЧчОӘКдіцТІҝЙТФЧчОӘКдИлК№УГЈ¬өұјмІв°ҙјьКұУГөДКЗЛьөДКдИл№ҰДЬЈ¬ОТГЗ°С°ҙјьөДТ»¶ЛҪУөШЈ¬БнТ»¶ЛУлөҘЖ¬»ъөДДіёцI/OҝЪПаБ¬Ј¬ҝӘКјКұПИёшёГI/OҝЪёіТ»ёцёЯөзЖҪЈ¬И»әуИГөҘЖ¬»ъІ»¶ПөДјмІвёГI/OҝЪКЗ·сұдОӘөНөзЖҪЈ¬өұ°ҙјьұХәПКұЈ¬јҙПаөұУЪёГI/OҝЪНЁ№э°ҙјьУлөШПаБ¬Ј¬ұдіЙөНөзЖҪЈ¬іМРтТ»ө©јмІвөҪI/OұдОӘөНөзЖҪФтЛөГч°ҙјьұ»°ҙПВЈ¬И»әуЦҙРРПаУҰөДЦёБоЎЈ ХвЦЦ°ҙјьФЪ°ҙПВәНЛЙҝӘКұ¶ј»бУР¶¶¶ҜПЦПуЈ¬ҝЙТФІЙУГУІјю»тХЯИнјюөД·ҪКҪАҙПыіэ¶¶¶ҜЈ¬ОӘБЛҪЪФјіЙұҫЈ¬ІЙУГИнјюСУКұөД·ҪКҪАҙПыіэ¶¶¶ҜөДУ°ПмЎЈ ОӘБЛМбёЯөҘЖ¬»ъөД№ӨЧчР§ВКЈ¬ұҫҙОЙијЖҪ«5ёц°ҙјьНЁ№эТ»ёцУлГЕБ¬ЦБөҘЖ¬»ъөДНвІҝЦР¶ПКдИлҝЪЎЈөұУР°ҙјь°ҙПВКұЈ¬өҘЖ¬»ъНЈПВХэФЪЧцөД№ӨЧчЈ¬ЧӘ¶шЦҙРР°ҙјьЙЁГиіМРтЈ¬И»әуЦҙРРПаУҰЦёБоЎЈ°ҙјьҝШЦЖөзВ·ИзНј10ЛщКҫЈә 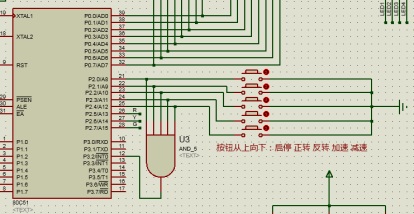
Нј10°ҙјьҝШЦЖөзВ· 4.ИнјюЙијЖ4.1 ЦчіМРтЙијЖ өұіМРтҝӘКјФЛРРКұЈ¬І»¶ПІЙјҜЦұБчөз»ъөДЧӘЛЩІўПФКҫЎЈЖдБчіМНјИзНј11ЛщКҫЈә 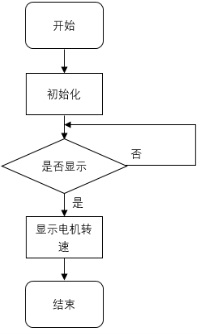
Нј11ЦчіМРтБчіМНј 4.2¶ЁКұЖч0ҝШЦЖІъЙъPWMІЁРО ЦұБчөз»ъөчЛЩТ»°гФЛУГPWMФӯАнАҙҪшРРЎЈ¶ФУЪЦұБчөз»ъАҙЛөЈ¬Из№ыјУФЪөзКаБҪ¶ЛөДөзС№ОӘВц¶ҜөзС№Ј¬ҝЙТФҝҙіцЈ¬ФЪTІ»ұдөДЗйҝцПВЈ¬ёДұдt1әНt2өДҝн¶ИЈ¬өзС№Ҫ«·ўЙъұд»ҜЎЈ 
Фт 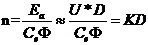 КҪЦРЈ¬ КЗіЈКэЎЈ КЗіЈКэЎЈ АыУГPWMөчЛЩөДФӯАнЈ¬ТІҫНКЗНЁ№эёДұдХјҝХұИАҙёДұдјУФЪөз»ъБҪ¶ЛөДөзС№Ј¬ҙУ¶шёДұдөз»ъөДЧӘЛЩЈ¬ЖдБчіМНјИзНј12ЛщКҫЎЈ 
Нј12 PWMІЁРОҝШЦЖБчіМНј ЦұБчөз»ъФЪҪшРРөчЛЩКұЈ¬НЁ№эёДұдұдБҝnumөДЦөКөПЦЎЈјУЛЩКұЈ¬numөДЦөФцјУЈ¬¶шTH0өДіхЦөФтПаУҰөДјхРЎЈ¬ТІҫНКЗТ»ёцЦЬЖЪЦРЈ¬ёЯөзЖҪПаУҰөДКұјдСУіӨЈ¬өНөзЖҪөДКұјдПаУҰјхРЎЛЩ¶ИФцјУЎЈјхЛЩКұnumөДЦөјхРЎЈ¬ТІҫНКЗTH0өДіхЦөФцјУЈ¬Т»ёцЦЬЖЪЦРЈ¬ёЯөзЖҪөДКұјдјхРЎЈ¬өНөзЖҪөДКұјдФцјУЈ¬ЛЩ¶ИҪөөНЎЈ 4.3°ҙјьЙЁГиіМРт өұ·ўЙъНвІҝЦР¶ПКұЈ¬өҘЖ¬»ъҪшИлНвІҝЦР¶ПіМРтЈ¬ҝӘКјЙЁГи°ҙјьЈ¬ПИЙЁГиKEY0°ҙјьЈ¬ҝҙКЗ·с°ҙПВБЛЖр/НЈјьЈ¬Из№ы°ҙПВБЛёГјьЈ¬ФтЦҙРРЖр/НЈіМРтЈ»Из№ыГ»УРФтЕР¶ПKEY1јьЈ¬ҝҙКЗ·с°ҙПВБЛёГјьЈ¬Иф№ы°ҙПВБЛЈ¬ФтЦҙРРХэЧӘіМРтЈ»Иф№ыГ»УРЕР¶ПKEY2јьЈ¬ИфёГјь°ҙПВЈ¬ФтЦҙРР·ҙЧӘіМРтЈ»ИфГ»УРФтјмІвKEY3јьКЗ·с°ҙПВЈ¬Иф°ҙПВЈ¬ФтЦҙРРјУЛЩіМРтЈ»ИфГ»УРФтјмІвKEY4јьЈ¬ИфёГјь°ҙПВЈ¬ФтЦҙРРјхЛЩіМРтЈ¬·сФтНЛіцЦР¶ПіМРтЎЈ°ҙјьПФКҫіМРтБчіМНјИзНј13ЛщКҫЎЈФЪХв¶ОЦР¶ПіМРтЦРЈ¬ЙЁГи°ҙјьЈ¬ІўЦҙРРПаУҰөДЦёБоЎЈТтОӘ°С°ҙјьЙЁГиіМРт·ЕөҪНвІҝЦР¶ПіМРтЦРЈ¬өҘЖ¬»ъЦ»УРФЪҪУКХөҪНвІҝЦР¶ПөДЙкЗлКұЈ¬ІЕИҘЙЁГи°ҙјьЈ¬ФЪОЮ°ҙјь°ҙПВКұЈ¬І»ұШАЛ·СКұјдИҘЙЁГи°ҙјьЈ¬МбёЯБЛCPUөДР§ВКЎЈ 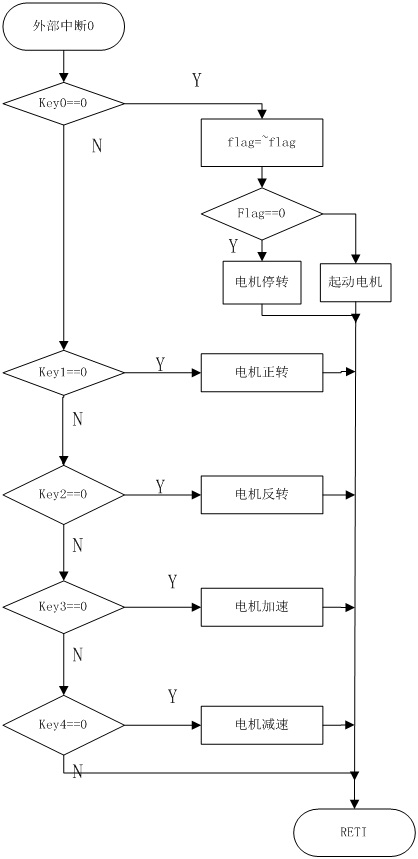
Нј13НвІҝЦР¶П°ҙјьЙЁГиіМРт 5.·ВХж·ЦОц5.1ProteusјтҪй ProteusҝӘ·ўЖҪМЁІ»ҪцДЬ№»КӨИОPCBөзВ·°еЙијЖЦЖЧчөД№ӨЧчЈ¬Н¬Кұ»№УөУРҪшРРҪ»»ҘКҪөД·ВХжІвКФөД№ҰДЬЎЈProteusИнјюКЗДҝЗ°УГ»§ЧоОӘЗанщөД·ВХжИнјюЈ¬ЛьІ»ҪцДЬ№»НкіЙөҘТ»өзВ·ТФј°»мәПөзВ·өД·ВХжУлЙијЖЈ¬Н¬КұДЬ№»әЬәГөДәНКРГжЙПіЈјыөДОўРНҝШЦЖЖчПөНіјжИЭЖҘЕдЎЈЛьНкГАөДНкіЙБЛҙУЙијЖФӯАнНјЎъ·ВХж·ЦОцЎъҙъВлөчКФЎъ№ҰДЬІвКФЎъРОіЙPCBөДНкХы№эіМЎЈҫӯ№э¶аДкөД·ўХ№УлНкЙЖЈ¬ИзҪсОЮВЫКЗФЪРФДЬЙП»№КЗ№ҰДЬЙП¶јФҪАҙФҪЦөөГ№гҙуУГ»§өДРЕАөЎЈ 5.2Инјю·ВХж ХвІҝ·Ц·ВХжЦчТӘКЗҪвҫціМРтЦРөДУп·ЁҙнОуЎЈУЙУЪіМРтҙъВлҪПіӨЈ¬ФЪКйРҙ№эіМЦРДСГвіцПЦУп·ЁҙнОуәНәҜКэІОКэАаРН·ҪГжөДҙнОуЈ¬ОТСЎФсК№УГkeil4ИнјюұаРҙіМРтЈ¬НЁ№эХвөАіМРтөД·ВХжЈ¬ДЬ»щұҫҪвҫцХв·ҪГжөДҙнОуЈ¬ОӘПВТ»ІҪУҰУГproteusИнјю·ВХжЧцәГЧјұёЎЈЖд·ВХжҪб№ыјыНј14Јә 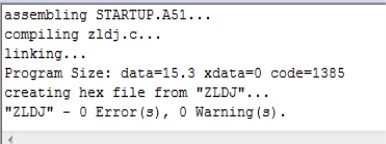
Нј14ФҙіМРт·ВХжҪб№ы УЙНјҝЙЦӘЈ¬іМРтТСОЮУп·ЁҙнОуЈ¬ұаТліЙ№ҰЈ¬ІўЗТЙъіЙhexОДјюЈ¬АыУГёГОДјюҝЙТФУлproteusИнјюБӘәП·ВХжЈ¬ҪшТ»ІҪјмІйіМРтөДУп·ЁҙнОуЎЈ 5.3ФЛУГproteusИнјюБӘәП·ВХж КЧПИФЪproteusИнјюЦР»ӯәГУІјюөзВ·Ј¬ІўјмІйУІјюөзВ·КЗ·сВъЧгТӘЗуЎЈФЪИ·¶ЁУІјю№ҰДЬХэіЈәуЈ¬ФШИлұаТлФҙіМРтЙъіЙөДhexОДјюЈ¬ФЪproteusИнјюЦР·ВХжФЛРРЈ¬НЁ№эөзВ·ЦРёчФӘјюТэҪЕПФКҫөДөзЖҪЧҙМ¬Ј¬јмІйИнјюВЯјӯЙПКЗ·сҙжФЪОКМвЎЈФЩИ·ИПГ»УРОКМвЦ®әуЈ¬ҝӘКјҪшИл·ВХжөД»·ҪЪЎЈ өг»чЧуПВҪЗФЛРРЦ®әуЈ¬өз»ъПФКҫ0ЧӘЛЩЈ¬КэВл№ЬТІПФКҫЛЩ¶ИОӘ0000Ј¬УТПВҪЗПФКҫөз»ъЧҙМ¬өДLEDөЖИ«ГрЎЈИзНј15Јә 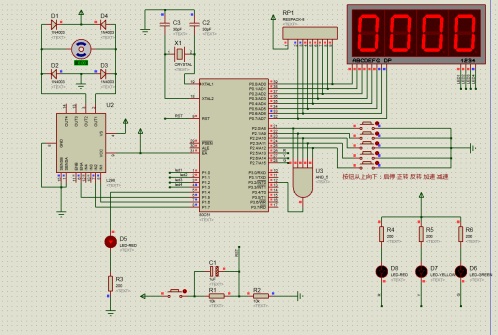
Нј15ҝӘКјФЛРР өг»чЖф¶ҜНЈЦ№°ҙЕҘЈ¬өз»ъҝӘКјХэЧӘЈ¬ІўО¬іЦТ»¶ЁөДЛЩ¶ИЈ¬ЛЩ¶ИПФКҫФЪКэВл№ЬЙПОӘ0209Ј¬УТПВҪЗәмөЖББЈ¬ұнКҫөз»ъҙҰФЪХэЧӘЧҙМ¬Ј¬ИзНј16Јә 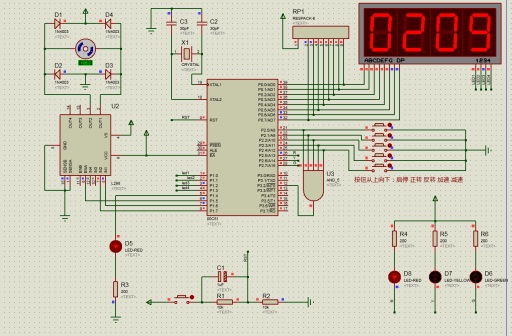
Нј16өг»чЖф¶ҜНЈЦ№°ҙЕҘәу»ӯГж өг»ч·ҙЧӘ°ҙЕҘЈ¬өз»ъҝӘКј·ҙЧӘЈ¬ІўО¬іЦТ»¶ЁөДЛЩ¶ИЈ¬ЛЩ¶ИПФКҫФЪКэВл№ЬЙПОӘ-209Ј¬УТПВҪЗ»ЖөЖББЈ¬ұнКҫөз»ъҙҰФЪ·ҙЧӘЧҙМ¬Ј¬ИзНј17Јә 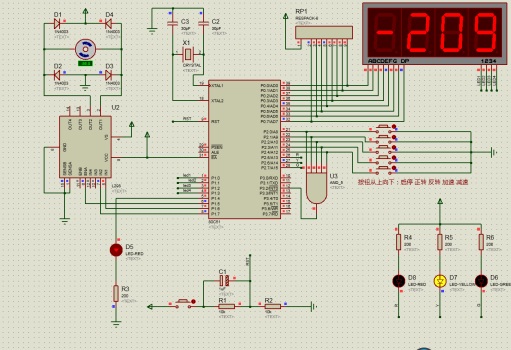
Нј17өг»ч·ҙЧӘ°ҙЕҘәу»ӯГж өг»чХэЧӘ°ҙЕҘЈ¬өз»ъҝӘКјХэЧӘЈ¬ІўО¬іЦТ»¶ЁөДЛЩ¶ИЈ¬ЛЩ¶ИПФКҫФЪКэВл№ЬЙПОӘ0209Ј¬УТПВҪЗәмөЖББЈ¬ұнКҫөз»ъҙҰФЪХэЧӘЧҙМ¬Ј¬ИзНј18Јә 
Нј18өг»чХэЧӘ°ҙЕҘәу»ӯГж өг»чјУЛЩ°ҙЕҘЈ¬өз»ъҝӘКјХэЧӘјУЛЩЈ¬ЛЩ¶ИПФКҫФЪКэВл№ЬЙПОӘ0220Ј¬УТПВҪЗәмөЖББЈ¬ұнКҫөз»ъҙҰФЪХэЧӘЧҙМ¬Ј¬ИзНј19Јә 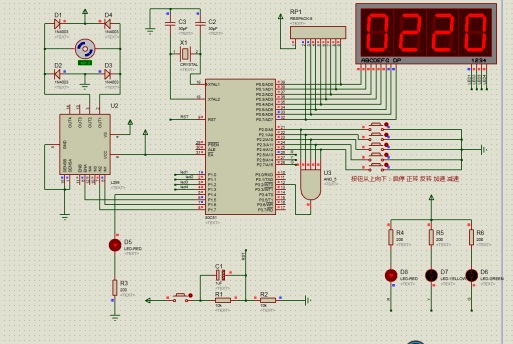
Нј19өг»чјУЛЩәу»ӯГж өг»чБҪҙОјхЛЩ°ҙЕҘЈ¬өз»ъҝӘКјХэЧӘјхЛЩЈ¬ЛЩ¶ИПФКҫФЪКэВл№ЬЙПОӘ0199Ј¬УТПВҪЗәмөЖББЈ¬ұнКҫөз»ъҙҰФЪХэЧӘЧҙМ¬Ј¬ИзНј20Јә 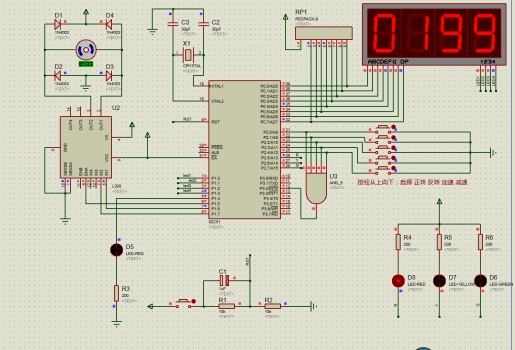
Нј20өг»чБҪҙОјхЛЩ°ҙЕҘәу»ӯГж өг»чЖф¶ҜНЈЦ№°ҙЕҘЈ¬өз»ъНЈЦ№ЧӘ¶ҜЈ¬ЛЩ¶ИПФКҫФЪКэВл№ЬЙПОӘ0000Ј¬УТПВҪЗВМөЖББЈ¬ұнКҫөз»ъҙҰФЪНЈЦ№ЧҙМ¬Ј¬ИзНј21Јә 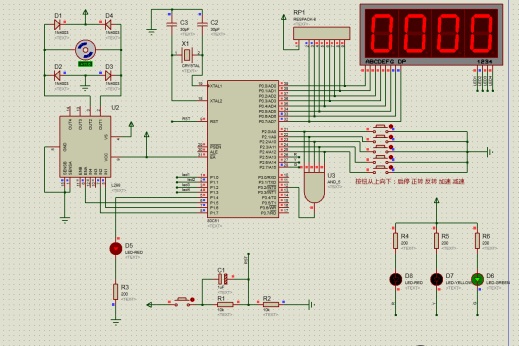
Нј21өг»чЖф¶ҜНЈЦ№°ҙЕҘәу»ӯГж - #include"reg52.h"
- #define uchar unsigned char
- #define uint unsigned int
- sbit IN1=P1^6;
- sbit IN2=P1^7;
- sbit ENA=P1^5;
- sbit KEY0=P2^0;
- sbit KEY1=P2^1;
- sbit KEY2=P2^2;
- sbit KEY3=P2^3;
- sbit KEY4=P2^4;
- sbit LEDR=P2^5;
- sbit LEDY=P2^6;
- sbit LEDG=P2^7;
- sbit WE1=P1^0;
- sbit WE2=P1^1;
- sbit WE3=P1^2;
- sbit WE4=P1^3;
- sbit led=P1^4;
-
- bit flag=0;
- bit sign=1;
- uint num=0;
- uchar code table[]={
- 0x3f,0x06,0x5b,0x4f,0x66,
- 0x6d,0x7d,0x07,0x7f,0x6f};
-
- void delay(uint n)
- {
- uint i,j;
- for(i=n;i>0;i--)
- for(j=0;j<110;j++);
- }
- void initial()
- {
- IN1=0;
- IN2=0;
- ENA=0;
- num=0;
- TMOD=0x01;
- TL0=0xff;
- TH0=0xff;
- EA=1;
- EX0=1;
- ET0=1;
- IT0=1;
- TR0=1;
- }
- void display(bit flag,uint n)
- {
- uint v;
- uchar qian,bai,shi,ge;
- v=(uint)(n*535.0/255);
- qian=v/1000;
- bai=(v-1000*qian)/100;
- shi=v%100/10;
- ge=v%10;
-
- WE1=0;
- if(flag==1)
- P0=table[0];
- else
- P0=0x40;
- delay(10);
- WE1=1;
-
- WE2=0;
- P0=table[bai];
- delay(10);
- WE2=1;
-
- WE3=0;
- P0=table[shi];
- delay(10);
- WE3=1;
-
- WE4=0;
- P0=table[ge];
- delay(10);
- WE4=1;
- }
-
- void main()
- {
- initial();
- while(1)
- {
- display(sign,num);
-
- }
- }
- void int0() interrupt 0
- {
- if(KEY0==0)
- {
- delay(10);
- if(KEY0==0)
- {
- flag=~flag;
- if(flag==0)
- {
- num=0;
- P2=0xff;
- ENA=0;
- IN1=0;
- IN2=0;
- LEDG=0;
- sign=1;
- }
- else
- {
- P2=0xff;
- num=100;
- IN1=0;
- IN2=1;
- LEDR=0;
- sign=1;
- }
- while(!KEY0);
- }
- }
- if(KEY1==0)
- {
- delay(10);
- if(KEY1==0)
- {
- P2=0xff;
- //ENA=1;
- IN1=0;
- IN2=1;
- LEDR=0;
- sign=1;
- }
- while(!KEY1);
- }
- if(KEY2==0)
- {
- delay(10);
- if(KEY2==0)
- {
- P2=0xff;
- //ENA=1;
- IN1=1;
- IN2=0;
- LEDY=0;
- sign=0;
- }
- while(!KEY2);
- }
- if(KEY3==0)
- {
-
- delay(10);
- if(KEY3==0)
- {
- num+=5;
- if(num>=255)
- num=255;
- }
- while(!KEY3);
- }
- if(KEY4==0)
- {
-
- delay(10);
- if(KEY4==0)
- {
- num-=5;
- if(num<=0)
- num=0;
- }
- while(!KEY4);
- }
- }
- void itt0() interrupt 1
- {
- ENA=~ENA;
- TL0=0xff; //¶ЁКұЖчЦШЧ°іхЦө
- led=~led;
- if(ENA==1)
- TH0=255-num; //¶ЁКұЖчёЯ8О»Ч°іхЦө
- else
- TH0=num;
- }
-
 ЦұБчөз»ъөДөчЛЩУлҝШЦЖ.docx
(808.31 KB, ПВФШҙОКэ: 318)
ЦұБчөз»ъөДөчЛЩУлҝШЦЖ.docx
(808.31 KB, ПВФШҙОКэ: 318)
| 



 [ёҙЦЖБҙҪУ]
[ёҙЦЖБҙҪУ]

 №ЬАнФұQQ:125739409;јјКхҪ»БчQQИә281945664
№ЬАнФұQQ:125739409;јјКхҪ»БчQQИә281945664





 QQәГУСәНИә
QQәГУСәНИә QQҝХјд
QQҝХјд МЪС¶ОўІ©
МЪС¶ОўІ© МЪС¶ЕуУС
МЪС¶ЕуУС КХІШ
КХІШ МФМы
МФМы ¶Ҙ
¶Ҙ ІИ
ІИ